全球定位系统跟踪冰块运动的技术设计和实践
2023-08-15陈书超李春江王庆凯李志军
陈书超,李春江,富 翔,张 晗,王庆凯,李志军
(大连理工大学海岸和近海工程国家重点实验室,辽宁 大连 116024)
我国北方河流、湖泊、海洋冬天均会结冰。在形成稳定冰层前后存在碎冰块,它们随风、流、浪等运动。流动的冰块对人类冰区活动会产生影响,如流冰会对水工建筑物造成破坏,流冰堆积形成冰塞冰坝产生壅水威胁下游生态和人类安全[1]。所以冰科学一直是研究的热点问题,冰生消过程[2-3]、冰物理和力学[4-7]、冰光学[8]、电磁学[9]以及冰下生态环境[10]均有研究。而河流和湖泊碎冰运动的研究相对较少,目前现场调查冰块运动的技术方案有三种:(1)卫星遥感监测,程一轩[11]根据卫星遥感图像产品对夏季北极海冰运动与风的关系进行统计研究;王子涵等[12]基于哨兵1号数据,使用目视识别方法对每日内尔斯海峡北部的浮冰运动进行追踪并融合多源冰情数据(风、海流、密集度等),综合分析不同密集度下浮冰运动同风、海流的关系。由于卫星遥感产品的时间间隔长,空间分辨率低,导致卫星遥感监测河流和湖泊冰块运动存在一定技术限制。(2)岸边监控,即在岸边安装摄像机对浮冰进行监测,此方法的优点是稳定性较好,可长时间连续监测。其缺点是岸边倾斜拍摄产生图像变形[13],对后续数据处理增加困难[14],监测范围小,夜晚或大雾天的图像模糊。(3)定位器跟踪冰块,将定位器固定在冰块上,随之漂流。宋春山等[15]应用全球定位系统(北斗+GPS)在黑龙江上游进行了追踪实验,GPS可实时上传冰块位置,据此描绘冰块运动方向与速度。由于定位器跟踪冰块运动可实现全天候不间断监测,不受天气影响,并且在信号覆盖的空间内均能实现监测。现在市面上定位器主要有GPS定位、北斗定位、基站定位、WiFi定位和蓝牙定位。GPS定位是最常见的定位方式,它定位精度高,运用领域广;北斗定位和GPS定位原理和优缺点基本相同,目前大部分定位系统采用GPS/北斗双模定位,可有效提高定位精度和准确性[16]。基站定位的准确性受跟踪位置附近基站的数量限制,难以保证精度。WiFi定位在脱离城市的野外仍难以使用。蓝牙定位使用条件苛刻,无法在野外使用。本文根据2022—2023冬季青海湖开展的GPS跟踪春季冰块运动试验,介绍作为冰块运动监测所选用GPS类型、采取GPS保护方法、实施冰面安装措施以及获取冰块运动数据,分析实践中遇到的问题和跟踪数据的可靠性。
1 所选GPS型号、性能和精度介绍
GPS主要分为接线式和便携式,接线式需外接电源,便携式内置电池。便携式便于野外使用,它具有价格低廉,使用方便,定位精确的特点。跟踪冰块运动,续航能力是衡量便携式GPS可行性的关键。这主要取决于电池容量和定位频率。在相同环境条件下,电池容量越大,续航时间越长,但GPS体积越大。一般GPS的最高定位频率为0.1 Hz,具体可自行设置,定位频率越高,续航时间会缩短。如果定位频率采用0.1 Hz,几种常见GPS的续航时间见表1。此外,还应考虑如果布设GPS的位置处于卫星数量较少或距离运营商网络基站较远时,虽然能够正常定位和传输数据,但由于设备需要不断搜索卫星和运营商网络信号,总体续航时间会相应缩短。故选择G410P型GPS用于青海湖冰上试验(图1),它的电池容量为20 000 mA,在-20~10 ℃环境温度下续航时间为25~35 d,尺寸大小见表1,满足在稳定冰层布设,跟踪流冰彻底消失的续航要求。

图1 青海湖使用的G410P型GPS定位器
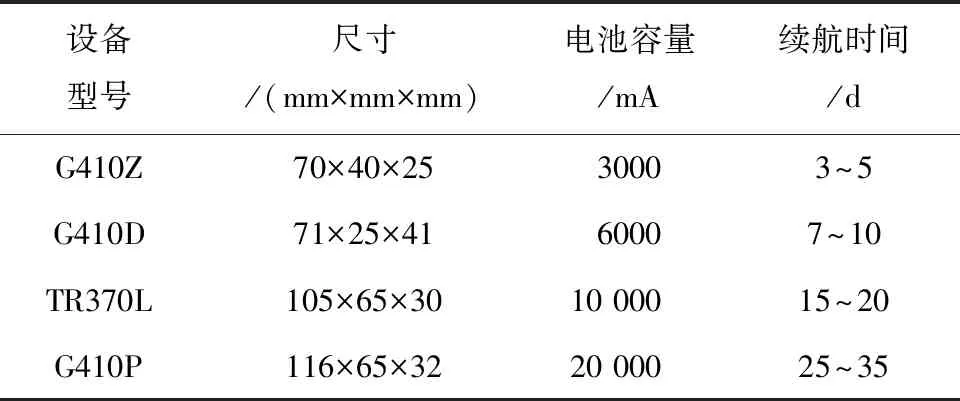
表1 常见GPS型号和续航时间
便携式GPS内置定位模块和数据传输模块,目前大部分GPS采用多重定位模式,在无遮挡的空旷环境下“GPS+北斗”模式定位精度≤10 m。数据传输取决于安放GPS周边运营商基站数量,因此选取GPS时,须先对跟踪冰块运动区域的运营商网络信号进行测试和比较。
2 GPS跟踪青海湖冰块运动的安放设计
为了保证GPS在复杂环境中的冰面上的安装与稳定运行,根据冰知识和实践经验,对GPS的布设设计做三方面考虑:即整体系统的防水性、抗压性和水面漂浮性。冰块运动中,冰面处于潮湿环境,特别是冰块运动可能使水溅到冰面,而GPS本身防水性较差,应对GPS定位器做防水处理;在冰块运动时,存在冰块之间的挤压和重叠,可能导致GPS受损,应该采取加固措施;另外如果GPS掉入水中,并随冰块运动,应保证GPS可以在水面上漂浮,因此系统的整体密度应该低于水的密度。
2.1 防水技术和实践
出于对GPS卫星信号传输受金属、混凝土等材料限制,选用较薄的塑料作为防水材料。最终采用了透明方形塑料瓶,如图2(a)。其材质为聚乙烯对苯二甲酸酯,容器底为方形,边长为115 mm;容器高为150 mm;瓶口圆形,直径为115 mm;容积为1500 mL,满足GPS的容纳需求。将GPS用气泡塑料纸包裹,放入瓶内,防止GPS瓶体的撞击。同时也对GPS起到保温作用,提高GPS的续航能力。选择的塑料瓶瓶口处带有螺纹,用适配的盖子进行封口,为了提高容器的密封性,在瓶口和盖子内侧增加防水垫,并将防水胶均匀涂抹于封口处。之后在盖外侧缠绕防水胶带增强密封性,进行防水密封后的GPS见图2(b)。布设前对防水密封性进行检验,将处理后的容器浸泡在水中30 d,未发现渗水现象,能够满足试验要求。
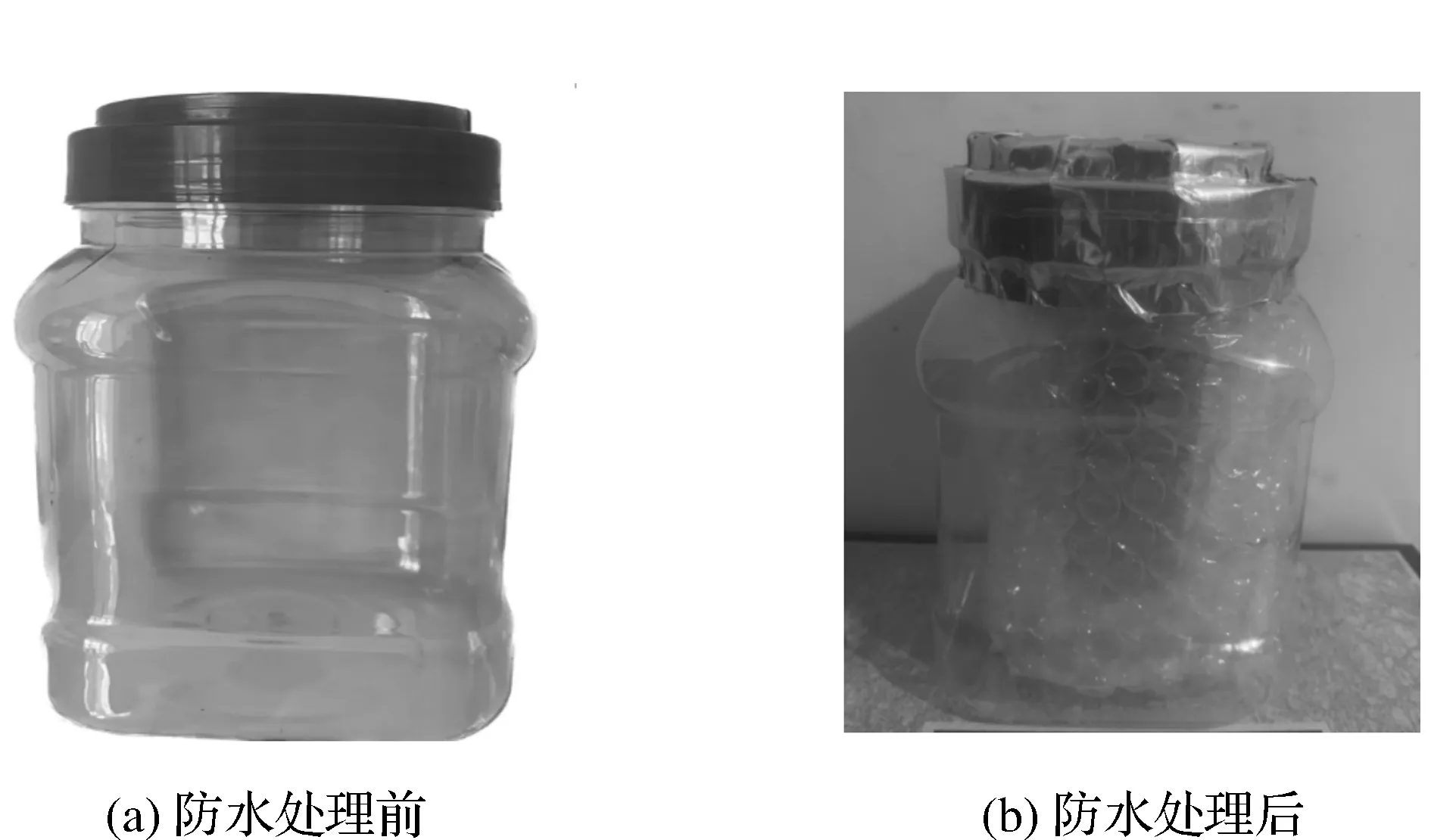
图2 GPS系统防水设计处理前后照片
2.2 抗损坏技术与实践
由于GPS选取的防水材料强度较低,可能在跟踪过程中由于冰块的挤压或重叠而损坏,因此需要加固。设计并制作的外围加固框架为木质结构,连接用螺丝固定。设计的结构形式有正六面体和正四面体。选择的木方截面尺寸有2 cm×3 cm和3 cm×5 cm二种。首先,对木方的抗压性进行测试,测试结果显示应采用截面尺寸为3 cm×5 cm。
六面体结构如图3(a)所示,共有木方12根,其中1号和2号木方长度为25 cm,3号和4号长度为40 cm,5号、6号、7号、8号长度为20 cm,9号和10号长度为22 cm,11号和12号长度为24 cm。首先,将1号、3号、5号、6号木方用螺丝固定成顶端齐平的“井”字形;再将2号、4号、7号、8号木方进行同样方式固定成顶端齐平的“井”字形;之后将两个“井”字木方结构平行放置,内侧间距为15 cm;3号和4号木方在对角上,9号和10号木方在“井”字结构两侧,11号木方在“井”字结构下方中间位置。用螺丝将其连接后,密封处理后的GPS的塑料容器从上方开口放置进去,再用12号木方固定在中间。正四面体结构如图3(b)所示,共用6根长度35 cm的木方。先用三根木方固定为正三角形,作为正四面体的底面,后将另三根木方下端固定在底面的三个角上,上方固定在一起,构成正四面体。
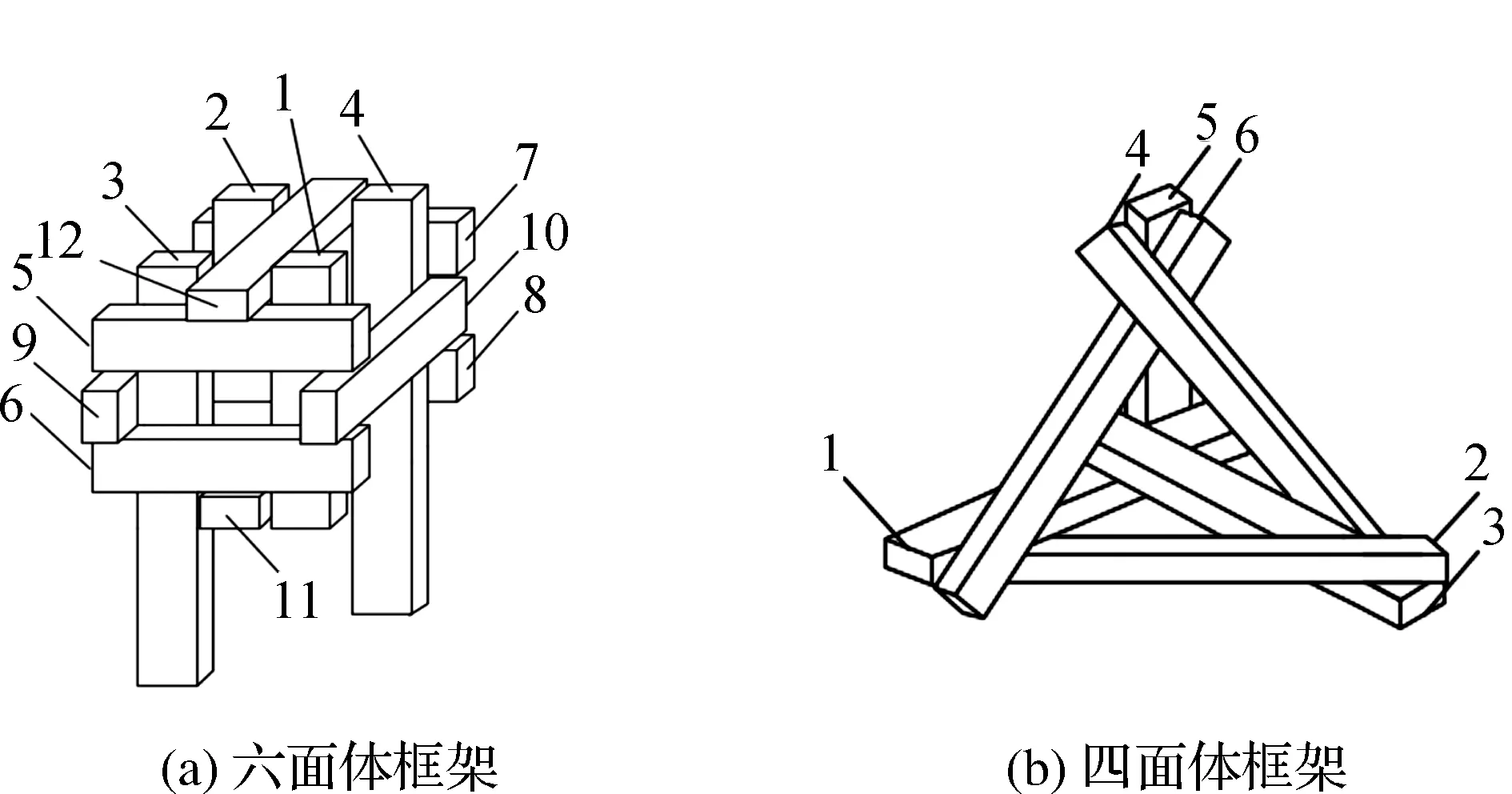
图3 抗损坏外框设计和实践示意图
两种结构,各有优缺点。正六面体制作方便,虽然用木方较多,因为各木方连接处均为直角,所以连接稳定,但缺点是放在冰面上易发生滚动。正四面体在冰面上稳定性更好,缺点是因每个面都是三角形,木方之间的连接均倾斜,用螺丝固定不稳定。另外GPS的密封容器在正四面体框架内剩余空间较大,容易受到外界碎冰挤压。对于青海湖湖冰,六面体结构更有优势。为了防止六面体结构在冰面上滚动,将对角两根竖向木方加长,将它们插入冰面上已经提前钻好的冰孔内,湖水的再冻结,使结构稳定在冰面上,确保GPS跟随冰块同步运动。冰面布设后的在GPS及其外围防损坏保护架如图4所示。

图4 按放在冰面上的GPS定位器
2.3 防止GPS沉入水底技术和实践
GPS重量约为400 g,防水塑料容器重量及其他防水材料总计50 g,密封后的容器体积为0.0015 m3,整体密度约为300 kg/m3。外围木方密度约为400 kg/m3,螺丝质量较小,可以忽略。从而整体上密度小于水的密度,即1000 kg/m3,即使滑落水中,也不会沉入水底。
3 GPS跟踪青海湖冰块运动的现场试验
3.1 研究区概况
试验地点位于青海湖二郎剑北侧的湖面上,青海湖东西长约109 km,南北宽约40 km,面积约4340 km2。通常在12月上旬湖水开始冻结,12月中旬湖面完全冰封,次年3月中下旬冰层开始消融,4月上中旬冰完全消融。
出于安全性考虑,试验布设GPS的时间选择在2023年3月中旬,此时青海湖湖冰处于融冰初期,冰内含水量和冰厚没有明显变化,又兼顾GPS的电池续航能力要求。考虑到GPS在冰面上工作时间长,将其设置为静止时不进行数据传输,从而有效增长工作时间。试验区域如图5所示。
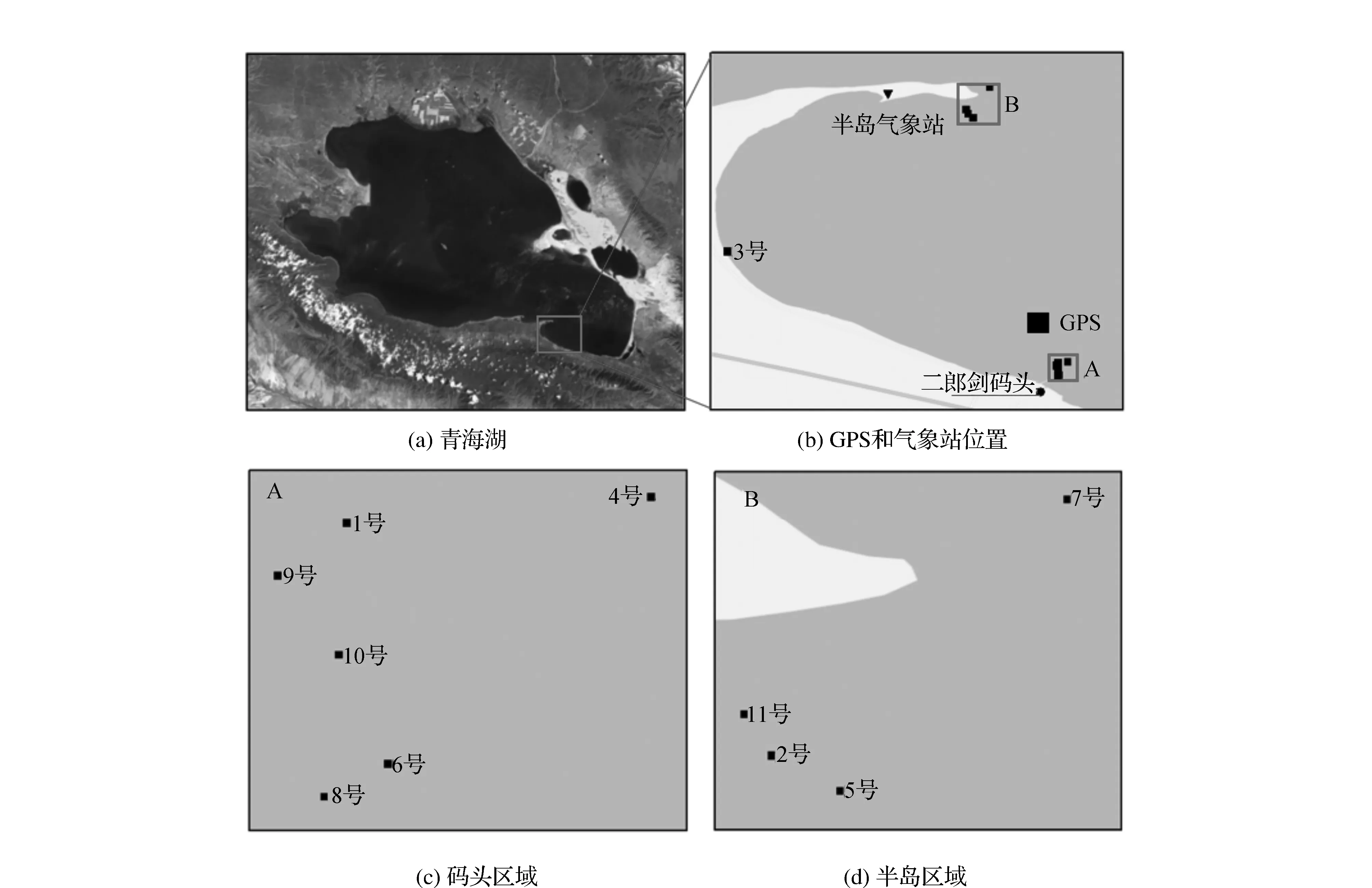
图5 青海湖试验场地布置
3.2 试验研究方法
在二郎剑景区码头西北方向的半岛上安装自动气象站,据码头约5 km(见图5(b))。本试验主要使用风速、风向数据,数据采集间隔设定为1 min,通过4G无线传输数据。
2023年3月14日在冰面上按放11个GPS定位器,布设位置如图5(b)所示。为便于记录,对GPS定位器进行编号,其中1号、4号、6号、8号、9号和10号放置于青海湖二郎剑景区码头北侧。3号放置于二郎剑景区码头西侧,据码头约5.7 km,2号、5号、7号、11号放置于二郎剑景区码头西北方向约5 km的半岛附近。在整个试验区域,各GPS皆可正常定位和传输数据,二郎剑景区码头附近的设备信号较好。放置于最北侧的7号设备由于卫星信号和设备信号都较差,增加了设备耗电,在冰体破碎之前电量耗尽,此时冰体已经过薄,无法进行更换,其他设备在冰体破碎之前均正常工作。
3.3 跟踪结果与分析
2023年4月2日青海湖冰面局部区域开始破碎,至4月16日冰面完全消融,整个开湖历时15 d。4月4日16时左右,放置于半岛附近的GPS定位器首先跟随冰体开始运动,5号GPS由于信号质量较差没有正常定位,2号和11号GPS可正常定位。4月5日8时左右,随着冰体破碎,其他GPS均开始随冰块运动。GPS定位器跟随碎冰同步运动的过程分为两个阶段。各阶段冰体破碎的时间存在差异,体现在GPS开始运动的时间不同。为了便于对比,表2给出各GPS运动的时段和存在的现象。
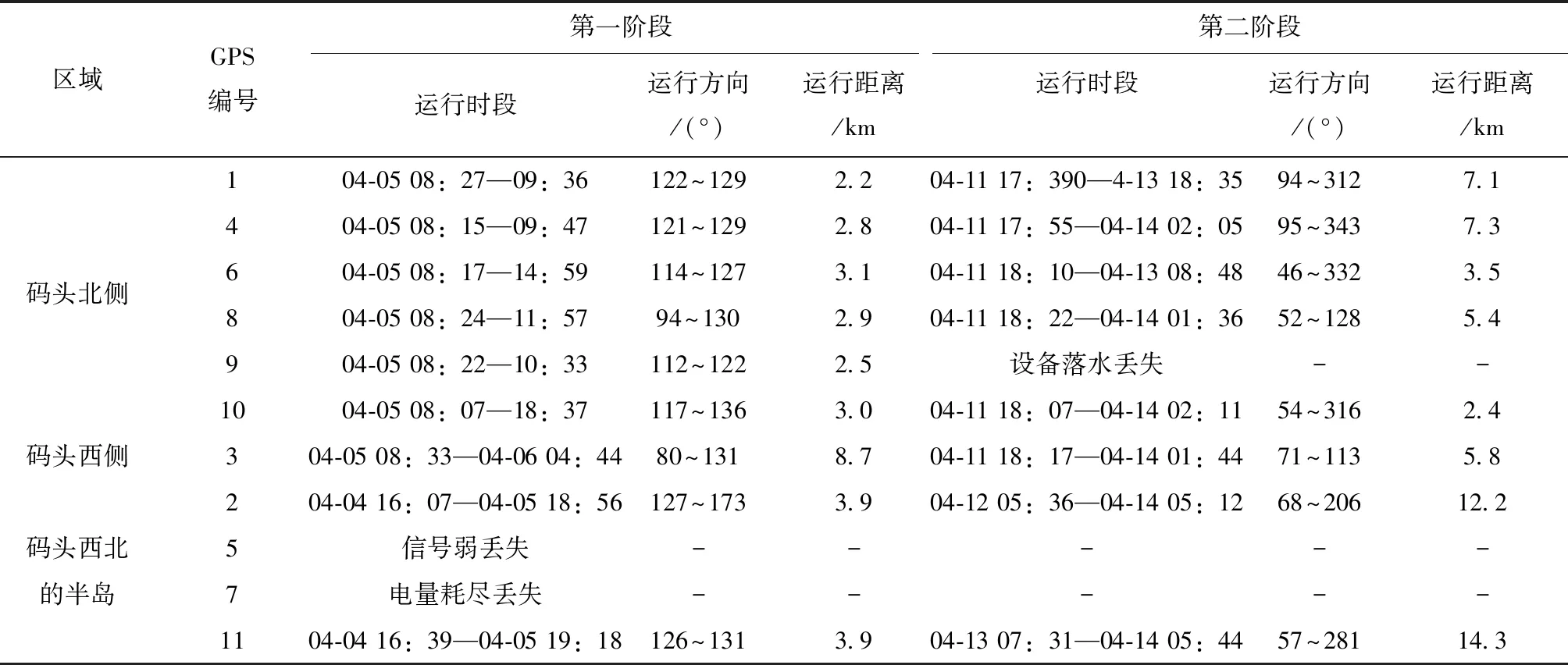
表2 2023年4月青海湖开湖时各个GPS的运动情况
图6(a)给出第一阶段各GPS运动轨迹,它们的运动方向基本一致。图6(b)给出第二阶段各GPS运动轨迹,其中9号GPS在第二次运动之前信号丢失,产生原因是在第一次运动过程中设备外部保护损坏引起容器进水。其他设备均正常工作,相同区域GPS运动方向基本一致。

图6 GPS定位器运动轨迹
两个阶段风速风向玫瑰图如图7所示。第一阶段为西北风,最大风速为22 m/s,GPS运动方向基本与风向一致。第二阶段主要风向仍为西北风,但风速较小,这与GPS运动轨迹中主方向为东南向,部分时刻运动方向发生变化的规律相吻合。
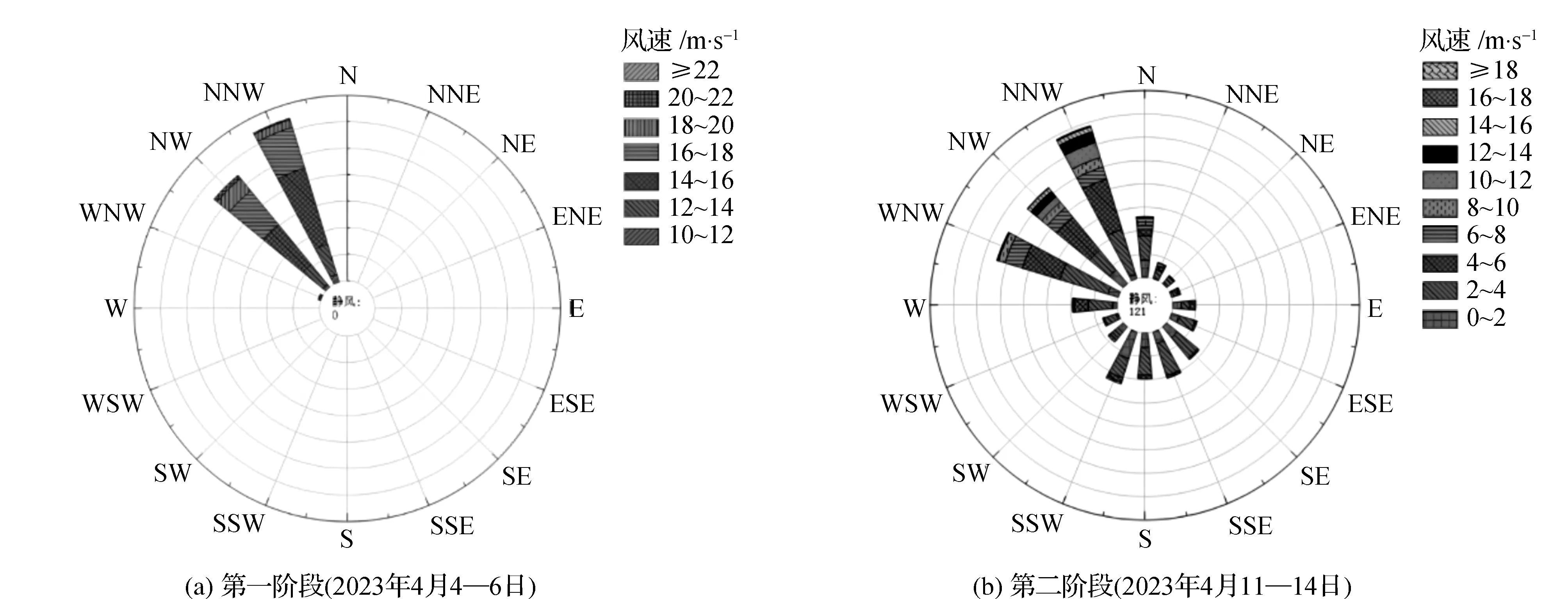
图7 风玫瑰图
4 结 论
(1)便携式GPS可实现对冰块运动的全天候跟踪且不受天气等因素影响,大容量电池可满足跟踪期间的续航要求,通过防水密封和外侧木方框架保护,可有效解决冰面GPS防水和防冰块撞击或挤压破损。
(2)通过青海湖冰块运动跟踪数据,2023年4月4日—14日期间有两次冰块运动时段,其主要运动方向均为东南方向,符合相应时段风向变化规律。
(3)青海湖放置的11个GPS除去在试验过程中信号丢失的3个,其余均记录了较为完整的冰块运动轨迹,体现了GPS或北斗定位器能够成功跟踪冰块运动,可以布放定位器矩阵。
(4)青海湖冰块运动跟踪技术方法可推广应用于冬季冻结河流或湖泊的流凌监测,如黄河、松花江等。
