煤矿井下坑道钻机自动卸杆装置研究
2023-08-12宁建东
*宁建东
(山西沁新煤业有限公司 山西 046500)
钻机为煤矿开采作业中重要的钻探设备,过去因为技术手段落后,使用钻机设备通常具有一定的风险,操作不当会引发安全隐患。为了保证作业生产安全,设计更加适合煤矿井下坑道的钻机自动卸杆装置就非常有必要。在设计过程中,运用现代技术手段,实现了智能钻机自动卸杆功能,自动卸杆装置系统中包括硬件系统以及软件系统,系统借助智能控制器,全面收集作业中各种形式信号,从而调整脉宽,及时驱动电磁阀,进而调节油缸自身的伸缩速度。控制器接收伸缩长度信号之后,会形成闭环控制系统,完成整个自动卸杆装置操作流程。系统完成设计之后应用于实验地点,运用智能控制器就可以进行钻机调控,满足各种作业环境要求,钻孔工作更加高效、可靠,钻孔质量也符合安全生产要求,实现了向自动化操作的过渡。
1.背景分析
煤炭是社会生产发展重要能源,但是开采过程中,容易发生各种安全事故。为此推动煤炭安全生产就尤为关键,可以为社会生产提供稳定的能源供应[1]。而采用井下钻孔可以有效防止瓦斯、水害等灾害的发生,为煤矿生产高效开展提供了必要的保障。当下我国煤矿开采使用的钻机有很多类型,如高转速钻机、套管钻机、多变福钻机、大功率定向钻机等。然而钻探设备自动化水平并不是非常完善,在坑道钻孔中需要人工辅助才能完成作业,降低了钻孔效率,且耗费的人力资源相对较多,增加了施工中的安全隐患。就目前我国煤矿产业发展现状来看,主要是向集约化方向发展,应该重点做好技术研发工作,促进钻孔自动卸杆装置研究,才能实现自动化钻孔施工,提升作业质量。
2.装置需求
自动卸杆装置需要与钻机配合实现钻杆装卸,在这个过程中不能影响钻井作业,所以应保证卸杆装置具备丰富的工作状态以及位置。原有的煤矿坑道钻机卸杆装置有优势、有不足,其中优点表现在能够满足煤矿坑道生产发展需求,结构紧凑,可以根据生产需要进行调节。但是也有显著的不足,表现为需要人工进行调节,在煤矿这样的环境下,容易发生危险,且灵活性不是很强,不能满足当下生产发展需求。对此,为了提高生产发展效率,就应该重点做好结构设计,研发自动卸杆装置,提高生产效率。通常情况下卸杆装置应包括运输、装卸、等待等各种状态,为了实现自动装卸,在设计中需要充分利用空间,控制钻机整体尺寸,确保全面维护钻机系统,使各项功能得以发挥。在设计自动卸杆装置时,应该在保证发挥各项功能的同时,使整个结构设计更加紧凑,同时还能给控制系统各硬件设置留下必要的安装空间,这样整个钻机部件布置才会更加合理。钻机主要应用了整体式履带结构,自动换杆装置使用传感器检测钻机动力头位置以及钻机夹持器,可以掌握钻机工作情况,保证自动卸杆工作实现自动化操作[2]。在操作过程中,需要做好以下判断:第一,判断杆仓位置,掌握钻机状态。第二,掌握钻机动力头与机械手之间的距离是否处于安全水平。第三,确定加持手取钻杆位置。第四,确定钻机当前是需要装钻杆还是卸钻杆。通过判断以上工作,使用传感器对钻机夹持动作进行检测,保证夹持手可以与钻机夹持器钻杆之间实现高效传递,确保自动装卸功能实现,为顺利开展钻孔工作提供保障。
3.钻机自动卸杆装置设计
结合钻机自动卸杆装置功能需求,需要保证其拥有较大的灵活性以及自由性,从而满足钻机钻孔要求,设计内容具体如下:
(1)硬件结构设计。自动卸杆装置需要使用智能控制器,充分发挥电液控制系统功能,正逐步得到推广。当下这种控制器相比于传统的PLC控制器,在计算能力方面更加突出,实现了自动卸杆智能化控制计算,整体驱动能力得到改进,同时因为不需要继电器配合,因此可以获得较大电流,控制电磁阀,驱动其可以正常发挥功能。为了使用灵活便捷,在进行结构设计时,应该保证结构紧凑,且可以设置一定数量的硬件接口,实现各种施工环境下自由卸杆,使钻孔工作可以正常进行。系统设计使用了智能控制器,可以实现隔爆功能,在电气隔离保护设置之下,提高钻孔工作效率。就控制器本身集成水平来看,相比于PLC效率更高,且适应性良好,在应用过程中,不会产生较大的功耗,其设计模式也可以应用于其他设备电液控制设计中。对整个结构进行设计时,主要是将智能控制器作为设计的主要核心部分,并以此为基础设计了换杆装置控制系统,系统结构如图1所示。
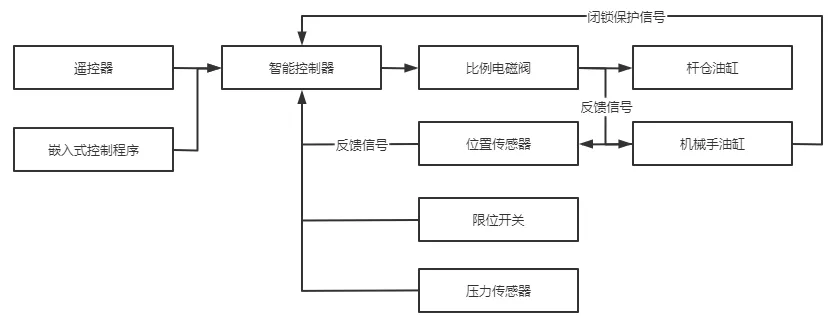
图1 换杆装置控制系统
图1中换杆装置包括5组油缸以及与此对应的电磁阀,其主要功能就是进行相应的驱动。同时其中还含有1组带位置反馈油缸以及比例电磁阀,4组伸缩油缸、换向电磁阀。在整个控制系统中,将智能控制器作为自动卸杆装置核心驱动。在计算机终端设备中,直接输入PWM信号以及开关信号,能够实现对电磁阀的驱动。使用PWM信号,能够有效调节系统中电流情况,并掌握比例电磁阀使用中的开合水平,这样才能更加高效地保证整个油缸的伸缩情况。在系统中磁致位移传感器可以将自动卸杆伸缩长度信号直接上传到控制器中,最后在系统中会形成一个针对油缸伸缩位置的闭环控制系统,使各项操作措施能够充分发挥出来。传感器可以监测钻机工作状态,在控制器中输出模拟量,控制器可以掌握钻机工作状态,并依据这些信息进行相应的逻辑计算,最后全面把握钻机的工作情况。控制器利用CAN总线,可以实现与遥控器之间的双向通信,在接收到信号之后,可以将操作指令传输给控制器,当遥控器接收到工作状态以及故障信息之后,将其展示给操作人员,并对其开展相应的操作,从而发挥自动卸杆各项功能。
(2)给进装置、自动上下杆装置设计。给进装置需要精准把握开孔、钻进状态,由给进油缸、连接架、后顶装置等多个部分组合而成,其中给进油缸选择的是单根单杆双作用油缸,并在油缸中设置了位移标准,能够准确掌握油缸所处的具体位置。在给进油缸中,主要包括活塞杆与托板,且在缸体之上还有耳环与整个机身相互固定,这样在油缸进行往复运动之后,就可以带动托板顺着机身实现导轨移动,保证回转器正常移动,稳定性更好[3]。机身在与连接架之间相互连接时,主要是使用螺栓实现的,同时连接架应该与左右调角装置相连接,可以借助液驱回转支撑,实现自由转动,并运用给进装置,保证角度调整的合理性。在机身下侧还装置了倾角传感器,能够显示装置机身工作状态下的角度,并可以随时进行调整。在整个装置左侧还安装了开关组件,可以准确判定机械手位置是否正确,并给予必要的加卸杆操作。在整个机身后面还设置了后顶装置,其功能就是调整好机身的整体姿态,起到良好的稳固作用,保证钻机过程机身平稳。结构如图2所示。

图2 自动卸杆装置
图2自动上下杆是钻杆实现自由装卸的重要执行机构,主要包括钻杆托架、机械手总成、回转支撑部分,其中钻杆托架主要功能就是可以存放钻杆,最多可以容纳7根钻杆。借助调节托板可以使托板实现向下倾斜的目标。在自动卸钻环节,钻杆可以实现自由下落,保证了钻杆的使用效率。机械手总成借助右侧转支撑,可以和左调角装置之间相互联系起来,这样整个装置实现了四联电磁手动换向阀的控制,保证了钻杆实现连续的装卸,满足复杂煤炭生产环境需求,确保在各种复杂环境下的作业操作。
(3)软件结构设计。系统功能发挥,还需要设计软件系统。在本结构设计中主要应用了CoDeSys V3PLC软件编程平台开发,在这个平台上具有完善的程序编辑器以及调试器功能,可以实现各种编程语言的编辑工作。在设计自动卸杆装置控制程序时,应该结合钻机工作状态、工作环境以及各种动作,进行状态设计,明确动作互锁关系。例如,钻机在钻孔中进行动力头动作时,自动卸杆中换杆装置处于静止状态,避免发生不必要的碰撞。同时因为钻孔会有各种差异化的动作,工作状态自然也是不同的,先进行什么状态、后进行什么状态需要确定优先级,这样才能保证钻孔动作安全水平。先进行软件部分设计时,需要结合自动卸杆装置完成软件部分的设计。
(4)双向通信设计。煤矿井下坑道钻机自动卸杆装置需要进行双向通信设计,双向通信即在控制器与遥控器之间实现通信,通信媒介利用了CAN总线实现,并借助遥控器实现信息的传输。就遥控器来说需要具备显示功能,控制器依据自动卸杆装置工作状态信息,可以将其传输到遥控器上,并显示出来,包括的状态主要有换杆机构状态、钻机工作状态以及钻杆数量统计。但是当系统发生异常情况时,系统会显示异常信号,并发出相应的报警信息,展示报警状态。
4.装置应用
因为组件自动卸杆装置具有非常显著的特殊性,系统设计过程中,应该保证钻机状态具备实时显示功能,这样才能更加高效地控制钻孔情况。钻机状态参数能够借助软件系统数据采集器中接收到钻机工作中的各项数据,并借助计算机显示出钻机的工作运行状态,例如,钻机回转压力、转速、钻机方位角等信息。利用显示软件可以接收钻头处信号,先对信号进行分析处理,最后实现实时显示目标。利用控制系统,收集到不同钻进参数之后,将这些信息转化为控制信号,最后将其编制成自动卸杆装置控制程序,在作业环节可以实现自动卸杆操作,提高了系统运作的综合效率。
因为自动卸杆装置具有鲜明的特征,在设计完成之后,应该对其进行现场应用,检测设计效果,各项功能是否可以正常发挥。在应用时首先选择试验坑道,选择好场地之后,在土层中开展钻进实验。实验土层主要是黄土,在遇到水分之后,黏性较大,很难钻进,所以需要借助空气实现钻孔。需要使用到空压机、配套钻具、外平钻杆以及钻头。在作业中共计钻孔12个,平均孔深度可以达到30.5m。在作业中自动卸杆在软件系统以及硬件系统共同控制之下,完成了作业活动,尤其是在作业环境相对复杂的地域,实现了自动调节,在预定的时间范围内完成了作业活动,且孔的综合质量都能满足生产作业要求,说明本次钻机自动卸杆装置设计符合生产作业需求,各部分设计合理,且工作过程中稳定可靠。在使用系统时,按下控制键之后,便能够实现自动卸杆功能,替代了传统人工进行替换的目标。尤其是对于一些复杂的施工环境,不再需要人力资源进行人工调节,为开展钻孔工作提供了必要的设备保障。
5.总结
综上所述,本文围绕煤矿井下坑道钻机自动卸杆装置进行了分析,可以看出当下随着技术手段的飞速发展,为实现自动卸杆装置功能提供了必要的条件。这种装置设计中应用了计算机信息技术手段,通过选用恰当的硬件设备以及软件系统,可以借助智能控制器操作自动卸杆装置,这样在坑道钻孔作业时,使用系统就能进行自由卸杆工作,克服了各种困难环境下钻孔出现的各种问题,保障了作业的整体质量和水平,为安全开展煤炭开采工作提供了基础条件,需要在未来发展中充分利用好这一技术手段,从而保障煤炭开采工作顺利进行。
