基于TX8三维激光扫描仪的储罐形变分析
2023-08-04刘杰房新玉熊伟
刘杰 房新玉* 熊伟
(1.交通运输部天津水运工程科学研究所; 2.天津水运工程勘察设计院有限公司&水运工程测绘技术重点实验室 天津 300456)
储罐是储存各种液体、气体原料及成品的专用设 备,是国家战略物资储备的重大基础性关键装备。在长期的使用过程中,由于受到初始缺陷与罐内负压等多种因素的影响变形[1],给储罐的运营带来风险,因此需要对储罐的变形情况进行检测和分析,常规的储罐外观检测方法包括围尺法、光学参比线法和全站仪法,这些常规方法具有劳动强度大、危险系数高、测量效率低、测量误差大等缺点[1-2]。
三维激光扫描技术通过高速激光扫描被测对象,快速、大量地采集被测对象的空间点位信息,获取对象表面的三维点云数据,为快速建立物体的三维影像模型提供了一种全新的技术手段,在测量的众多领域得到了广泛的应用[3-6]。
采用三维激光扫描技术可以快速获取储罐的外观表面点云,精确地计算储罐的变形量,判断变形位置,为储罐的安全平稳运行提供参考。
1 储罐数据采集及预处理
1.1 储罐数据采集
此次试验储罐为一座储量为10 000 m3的常压拱顶钢制油罐,该储罐运营已达14周年以上。为了储罐更有效地安全平稳运行,需对储罐的形变进行分析,采用三维激光扫描技术采集储罐点云并分析。试验采用Trimble TX8 三维激光扫描仪获取储罐的点云数据,TX8 的扫描速度为100 万点/sec,120 m 范围内的精度优于2 mm,扫描速度2~3 min。此次扫描对储罐外壁进行点云数据采集,设置6个测站,架设在储罐周边。
1.2 点云数据预处理
点云数据的预处理包括点云数据的拼接、过滤。点云数据拼接通过Trimble Realworks 全自动无目标全自动配准功能实现,该功能基于地物特征实现无目标全自动配准。点云数据过滤去除多余的点云,包括噪声点、罐的附件,建立罐的外壁点云,储罐外壁点云图如图1所示。
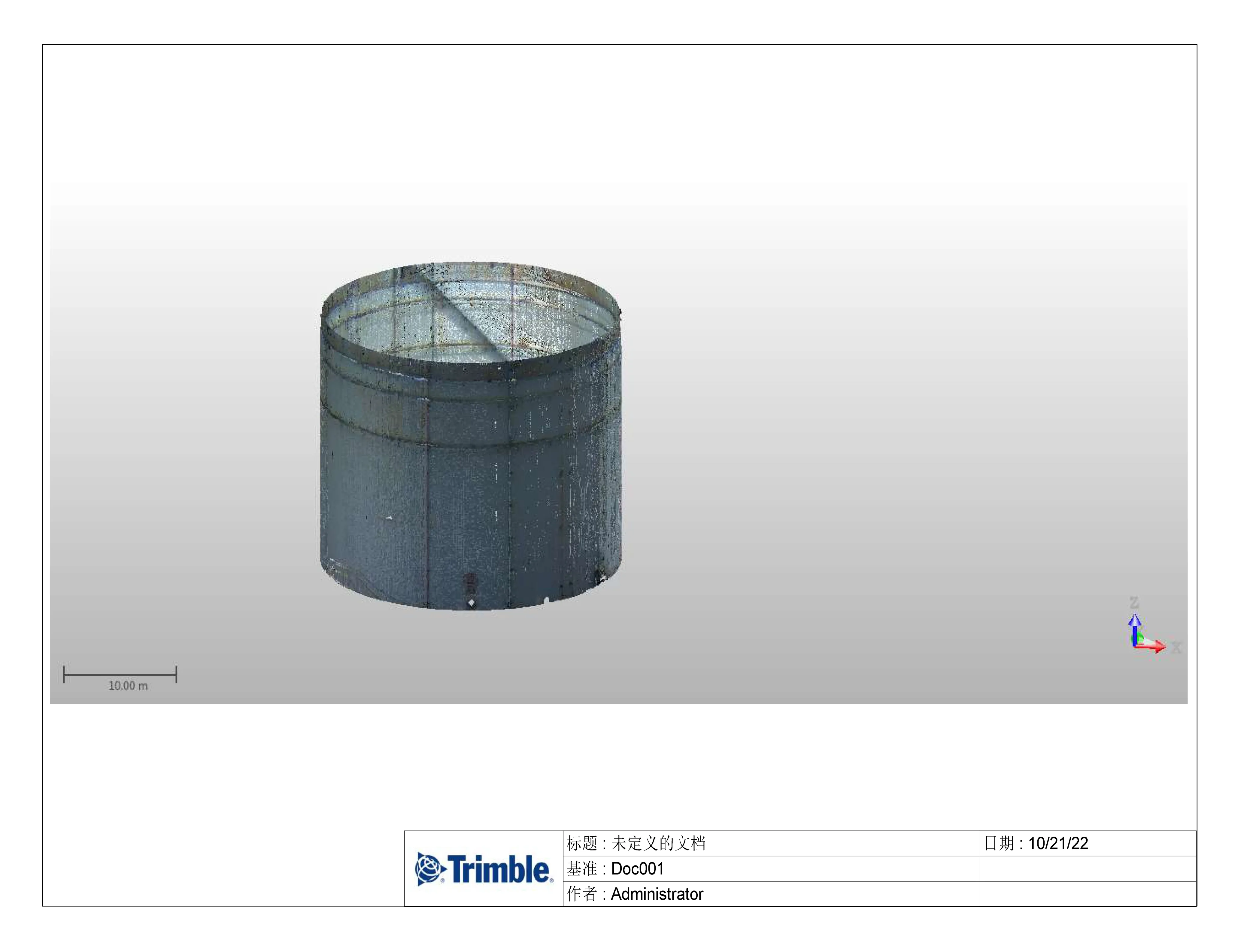
图1 储罐外壁点云图
2 点云数据处理
2.1 水平截面数据处理及分析
首先,对点云数据进行切片,设置切片厚度为1 mm,切片间距为1 m,共得到21组点云切片,切片点云图如图2所示。
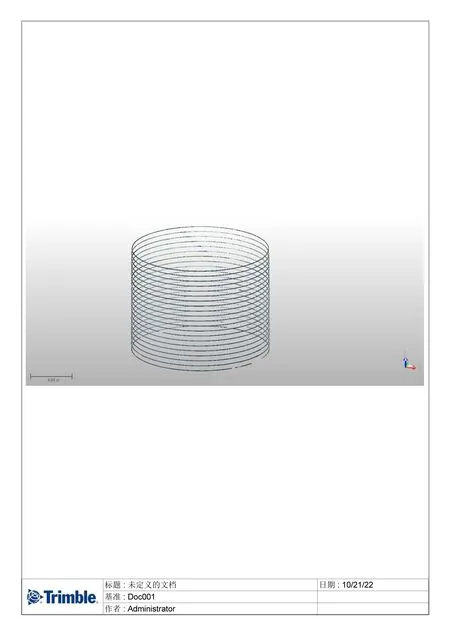
图2 切片点云图
采用最小二乘法对水平点云切片进行拟合,计算出各水平截面圆的半径和圆心坐标,并计算出每一切片的最大径向偏差。式(1)中d值最小时,即得最优拟合圆。
式(1)中:d为径向偏差;R为水平截面圆半径;(x0,y0)为切片拟合圆心坐标;(xi,yi)i∈(1,2,3,…,N)为切片点云样本集。
《立式圆筒形钢制焊接油罐操作维护修理规范》(SY/T 5921-2017)[7]规定,底圈罐壁1 m高处,内表面任意点半径偏差不超过19 mm,1 m 高以上,半径偏差不超过2 倍半径允许偏差。此次测量的为罐体外表面,且含有保温层,因此底圈罐壁限差取2 倍允许偏差为38 mm,1 m高以上取3倍允许偏差为57 mm。从表1数据可以看出,15#、17#、18#均超出标准偏差57 mm 限差,其他各切片未超出限差。
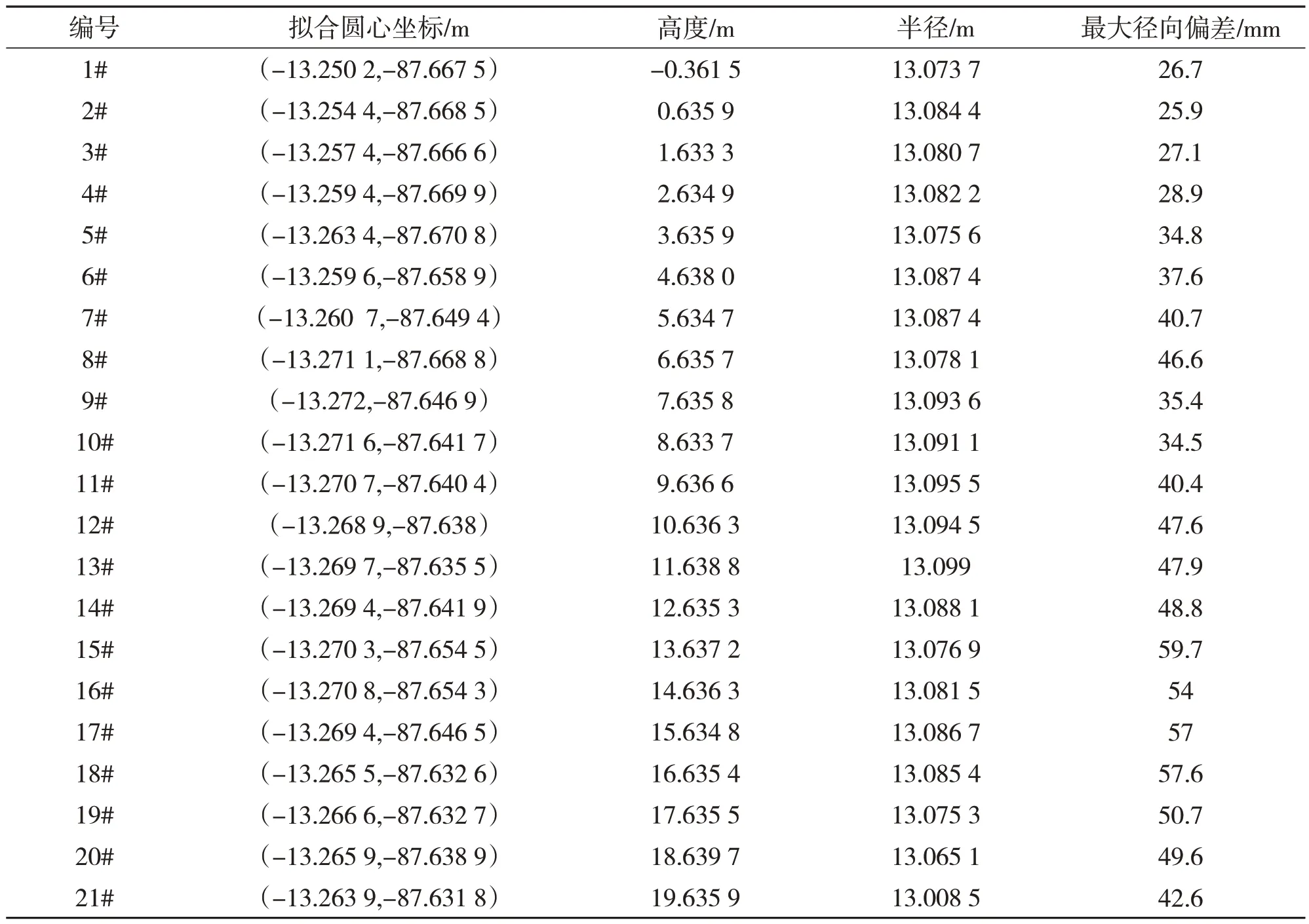
表1 切片点云拟合结果
2.2 储罐倾斜度计算
拟合圆心连成的直线与垂线的夹角即为储罐的倾斜度,当储罐发生变形时,储罐不同高度的切片圆心相对于底部圆心的垂直位置会发生变化。根据各个切片圆心相对于底部圆心的偏移可计算出各个切片相对于底部的倾斜度。
假定底板0#切片为基准,根据表1数据,计算各个切片的倾斜度。
式(2)中:θi为第i个切片的倾斜度;(xi,yi)第i个切片的圆心坐标;(x0,y0)指0#切片的圆心坐标,ΔH指第i个切片距0#切片的高度。
根据《立式金属罐容量检定规程》(JJG 168-2018)[8],可知罐体的倾斜度不得超过1°。罐体不同高度的倾斜度见表2 罐体相对底板倾斜度表,由表2 可以看出,罐体最大倾斜度为0.247°,未超出标准要求。
2.3 罐壁垂直度分析
罐壁垂直度是通过储罐垂直剖面相距垂直中心线的水平位移来分析和计算,通过对罐壁垂直度进行分析,可以从罐体更多角度分析结构安全。储罐沿垂直剖面,每间隔一定角度进行垂直剖分,并绘制纵剖图,可以直观地反映罐壁上任一点与垂线上的内陷或外凸的缺陷信息,如图3所示。从图3中可以看出,在顶部,储罐有一个自然收缩的过程,这与储罐顶部罐径变小的实际情况相符,在储罐其他位置,剖面上的外凸和内陷均在限差范围内。
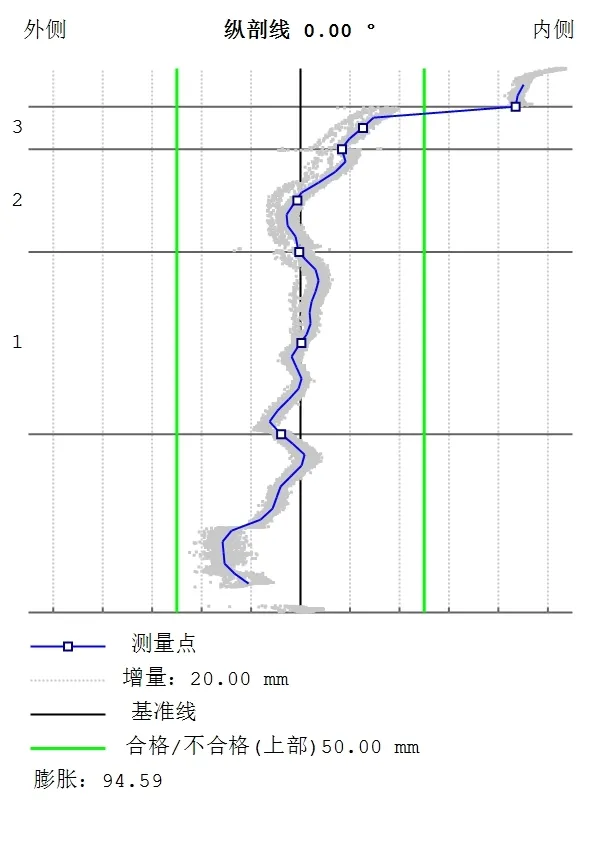
图3 储罐垂直剖面图
2.4 储罐壁圆度分析
以储罐模型为基础,在储罐某一高度进行标记切割,分析该截面横向变形量,就可以分析储罐壁圆度。对三维激光扫描仪扫描的点云数据在储罐第一个焊缝的位置进行切割,然后将该层点云数据和由点云数据拟合的圆进行比对,可得到储罐壁上该焊缝整个周向的变形量,如图4所示;从图中可以看出,该焊缝上,最大偏差为33.78 mm,未超过57 mm的限差要求。
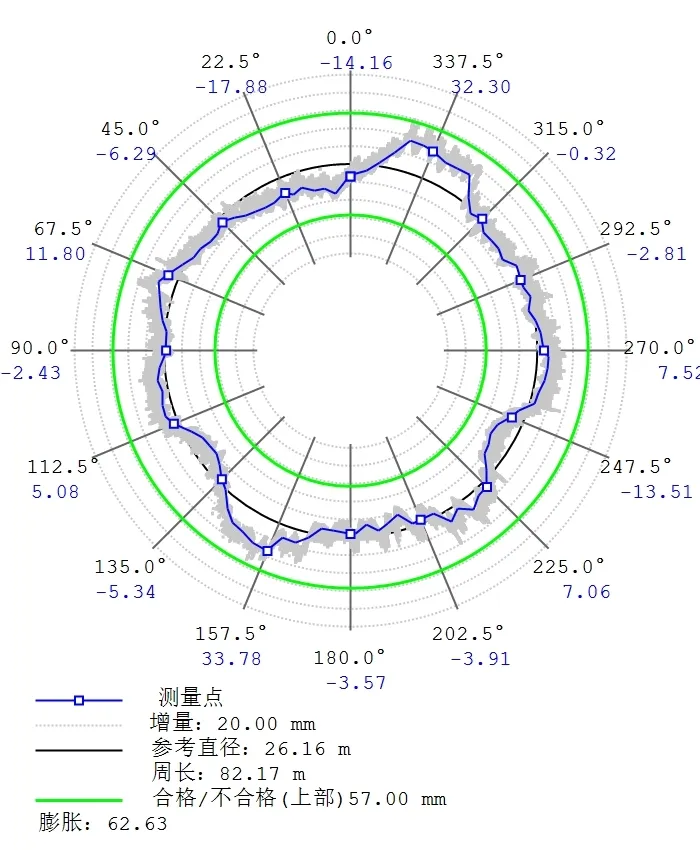
图4 储罐水平剖面图
3 结语
该文通过三维激光扫描仪扫描点云数据,将点云数据进行拼接、过滤,然后分别对最大径向偏差、倾斜度、罐壁垂直度、罐壁圆度进行了分析。分析表明:基于TX8 的三维激光点云,可以精确地计算储罐的变形情况,能够有效地识别储罐的变形,并对储罐的变形的范围和大小进行分析。相对于常规的储罐形变测量检测方法,可以实现立式储罐更加直观、全面、准确地进行评估。
