基于FMCW 的雷达测量技术在河道流量监测中的应用
2023-08-03徐耀东
徐耀东
(安徽省(水利部淮河水利委员会)水利科学研究院(安徽省水利工程质量检测中心站),安徽 合肥 230088)
河流水文特征主要有流量、水位、径流量、含沙量、汛期等,河流的水位和流速可以直接反映出河流的补给量、汛期时间长短以及河流的航运价值。当前全省水资源丰富,河流水系广泛,对河流水文特征的监测就变得很重要。河道流量监测是保证水文数据真实有效的一个重要措施,具有重要的数据参考价值和实际应用价值。
1 FMCW 技术
1.1 概述
FMCW 技术是一种新兴的雷达测量技术,其全称为“调频连续波雷达技术”(Frequency Modulated Continuous WaveRadar,缩写为FMCW Radar)。相比于传统的脉冲雷达技术,FMCW 技术采用了连续波形式的信号,其特点显著且优越,具有更高的分辨率、更小的功耗和更长的测距范围等。FMCW 技术利用信号调制的方式实现测距。该模式下,雷达发射端向目标物发射连续的调频波,接收端采样信号后通过频率分析,得到目标物与雷达发射端之间的距离和速度信息。相较于传统的脉冲雷达技术,FMCW技术具有更高的信噪比和更好的抗多径干扰性能。
1.2 算法说明
FMCW 技术的测距原理采用检测回波时延来计算当前距离,再通过检测回波的多普勒频移成分来计算当前测速。其发射信号和回波信号的示意图如图1。

图1 回波示意图
其回波信号可看成发射信号的时延信号来进行计算,将回波时延与频率定义为线性关系,从而可以通过计算回波时延来计算当前距离。可得到FMCW 测距公式为:
其中:
c :光速;Ts :扫频周期;Bw:扫频带宽;f:回波差频。
在检测运行情况时,其回波信号中具备多普勒效应,回波信号与发射信号比较有一定的频移,通过计算回波频移量可以计算出当前速度。FMCW 技术采用的是FFT 频移处理方法,其测速推导公式为:
多普勒相位变化量得到速度:
其中:Tc 为相邻回波周期间隔。
2 硬件实现
基于FMCW 技术的雷达测速仪是由STM32L476单片机作为核心处理单元,并选择TI 的IWR1642 的工业毫米雷达传感器作为探测核心单元,再配备通讯单元和电源管理系统,以及人机交互单元组成。该雷达传感器采用的是FMCW 测距技术,通过uart 接口与STM32L476 进行通讯。对外则是通过RS485 接口来实现,人员通过调试工具建立人机交互,可以实现采集和参数配置。该设备具备水面监测模式和水面环境扫描模式,人员通过RS485 总线与调试工具建立人机交互。在水面监测模式下,STM32L476 进入自动采集功能,并对采集到的当前水位和流速数据进行滤波处理和历史记录保存。当配置为水面环境扫描模式下,人员可通过调试工具,记录所扫描范围内的水草、水面漂浮物等物体位置波形,并将其保存到内部flash中,再配合自动采集功能,可提高采集精度。
3 硬件核心结构
3.1 雷达传感器单元
雷达传感器单元采用的是TI 的IWR1642 工业级毫米波雷达传感器芯片,此传感器内置用于FMCW信号处理的C674XDSP 处理器,采用80GHz 的频率,自带4GHz 的连续带宽,并且内置基于NPLL 的高精度线性调节脉冲引擎来支持FMCW 技术。2 发4 收天线结构,增加数据稳定性的同时还减小了pcb 板设计尺寸。该传感器还具有自动校准和检测功能,同时该传感器还具备独立运行能力,可以最大限度解放单片机的处理能力,再通过uart 串口将实时数据传送到STM32L476。该传感器芯片内置6 路ADC采集传感器,自带算法,能够简单迅速地完成数据转换。
3.2 主控MCU 单元
主控MCU 选择的是ST 公司Cortern_M4 内核的STM32L476 的单片机,该单片机具备超低功耗模式,最低可降到0.2uA 级。该款单片机同时具备丰富的硬件资源,具备lcd 接口,可直接驱动lcd 屏,作为人机交互使用。6 组uart 接口,能在MCU 休眠情况下依旧进行数据通讯。该主控MCU 通过uart 接口与雷达传感器和RS485 总线电路进行通讯,再配合IIC接口与TFT 液晶屏连接完成人机交互功能,实现设备参数设置和实时数据读取。
4 程序结构与上位机测试
水位计程序设计的核心为STM32L476 实时和IWR1642 进行数据通讯,定时读取当前IWR1642采集回来的测量距离数据,判断是否为通讯报警。IWR1642 具备自主测量距离的功能,无需提高与IWR1642 的采集频率。STM32L476 通过RS485 总线将采集到的数据传送到上位机或者数据中心,并通过TFT 屏显示出当前水位数据。
5 现场测试及结果分析
为验证基于FMCW 的雷达测速仪在河道监测中的测量精度,进行了一系列实验,并对实验结果进行了详细分析和解读。整体测试分为实验室测试环境和实际场景的测试环境。实验室测试阶段主要为EMS 电磁兼容性型式实验和环境实验两类。使用的检测设备和执行标准按照国标《电磁兼容试验和测量技术》和《电工电子产品环境试验第2 部分试验方法试验》的要求进行。
首先,在实验前进行了系统的校准,包括对发射信号功率、接收灵敏度、参考线位置等参数进行了精确的调整。同时,进行了射频链路的去耦以及环境抗干扰措施,以保证实验的准确性和可靠性。
其次,选取5 个不同深度和流速的水位点位进行测量,并分别记录了十组数据,以确保实验结果具有充分的可信度。在测量过程中,要求实验人员严格掌握操作规程,保证每次测量的湍流和涟漪对结果产生的干扰最小。
在数据统计方面,对每个测量点位的十组数据进行了平均值处理,并计算出标准差和最大误差等关键指标。通过对数据的多次比对和分析发现,相较于其他测量方法,基于FMCW 技术的雷达测速仪具有更高的测量精度和稳定性,其平均误差仅为2mm,相对误差不超过0.1%。
最后,对实验结果进行图表展示和趋势分析。从图表中可以看出,在不同水深和流速的情况下,基于FMCW 技术的雷达测速仪具有更为适用的性能和更加稳定的测量结果。当水位深度和流速较大时,雷达测量误差有所增加,但也能够控制在可接受的范围内;而在水位较浅、流速较缓的情况下,雷达测量误差更小,精度更高。数据如图2~图4 所示。
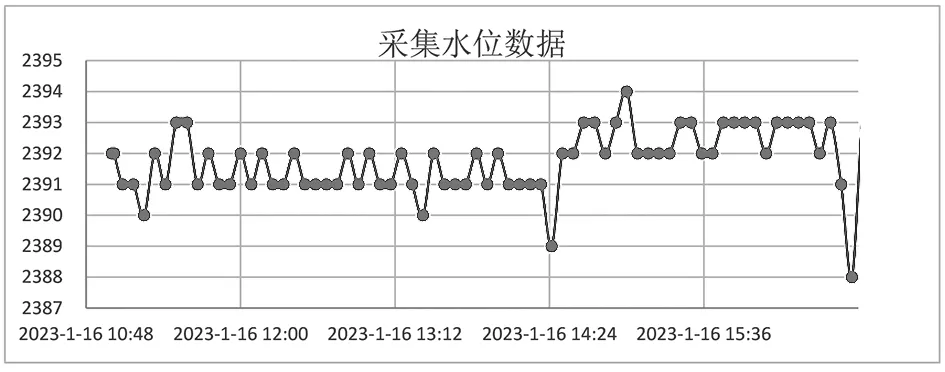
图2 流速慢水域图

图3 流速快水域图

图4 测试结果图
6 结束语
本研究通过实际的测量操作,验证了基于FMCW 技术的雷达流速计在河道水文检测中具有良好的测量精度和稳定性,可以广泛应用于水利工程、自然灾害监测等领域。但实验过程中也发现了一些问题,例如在测量结果的处理和分析方面还有待改进,对于信号噪声干扰和多径反射等问题的解决也需要更深入的研究
