基于多尺度融合预测模型的航空发动机剩余寿命预测
2023-08-02刘纳川郭建胜张晓丰余稼洋
刘纳川,郭建胜,张晓丰,余稼洋,解 涛
(空军工程大学 装备管理与无人机工程学院,西安 710051)
0 引言
航空发动机预测与健康管理技术(PHM)是近年来发动机发展的先进技术,是推动维修保障模式改革,提高发动机安全性、可靠性和经济可承受性的重要手段[1]。航空发动机的剩余使用寿命(RUL)预测是PHM领域的一项关键任务。准确预测航空发动机的RUL,可以得到意外故障的早期警报,针对性地调整相应的操作流程并提出维修策略[2-3]。目前,常见的剩余寿命预测方法主要有2种:基于物理模型的方法和基于数据驱动的方法。由于航空发动机结构复杂,数学模型严重非线性,观测数据之间耦合程度很深,因此传统的基于物理模型的预测方法难以构建准确的退化模型[4-5]。而基于数据驱动的预测方法主要依据大量的传感器数据,采用相应的智能算法来学习和表达系统的退化过程,不需要深入理解系统的内部细节和复杂的退化机理,实用性强。特别是随着传感技术的快速发展,许多基于数据驱动的RUL预测方法应运而生。
基于数据驱动的RUL预测方法主要分为统计分析和深度学习两类。C.Ordóez等[6]提出了一种ARIMA-SVM混合模型,首先设计一个ARIMA模型来预测传感器信号,然后根据此信号利用支持向量机模型预测RUL;A.Chehade等[7]提出了一种基于统计假设检验的传感器融合框架,以t分布来衡量退化状态的最大可分性,并利用健康指标来预测RUL;Wang等[8]提出了一种基于连续隐马尔可夫模型(CHMM)的RUL预测方法,通过小波包理论提取特征,分析CHMM中每个状态间的传递时间,从而得到当前状态到失效状态的平均RUL;Si等[9]首先利用维纳过程模拟系统的退化过程,其次使用递归滤波、EM算法分别更新维纳过程中漂移系数和其他参数,最后基于首达时间的概念得到RUL分布[9]。与基于统计分析的数据驱动预测方法相比,深度学习技术具有更强地捕捉输入和输出之间复杂非线性关系以及时间序列中长期依赖的能力。LSTM网络(RNN的一种变体)较好地解决了RNN在学习长期依赖关系中梯度弥散和爆炸的问题。因此,它在RUL预测的过程中应用越来越广泛。郑帅等[10]直接根据传感器信号利用LSTM网络预测RUL,并在PHM08挑战数据集、C-MAPSS数据集、Milling 数据集上进行了测试,在大多数情况下,LSTM的性能优于其他基准模型。Shi等[11]设计了一个双层的LSTM网络,第一层用于检测退化拐点,第二层用于拟合HI,然后根据HI和RUL之间的函数关系,推导出RUL。除了循环神经网络之外,由于注意力机制[12]在自然语言处理领域取得的巨大成功,不少学者也将其应用于RUL预测中。陈保家等将注意力机制融入到多层残差网络中,有效的提高了预测的效率[13]。叶瑞达等[14]将双层残差网络用于 CNN 和 LSTM 网络中,构建卷积记忆残差注意力网络(CMRSA)对RUL进行预测。
目前,基于统计分析的RUL预测方法由于其较为苛刻的假设条件以及较高的计算复杂度导致其难以推广,而基于深度学习的RUL预测方法更偏重于对数据深层特征的提取以及网络结构的丰富,对于多源输入对预测的不同影响以及时间特征提取的充分性考虑不足[13]。此外,大多数基于深度学习的方法仅提供RUL的点估计,而预测中的多重不确定性使得模型难以提供绝对准确的值,因此,处理预测不确定性对于RUL预测至关重要。
针对以上问题,本文提出了一种基于多尺度融合预测模型的航空发动机剩余寿命预测方法。该方法通过静态协变量编码网络对静态数据进行处理,将生成的四类静态协变量连接到模型的不同位置,辅助模型进行不同尺度时间特征的提取;利用变量选择网络对多源输入进行选择,抑制不必要特征和噪声的输入;采用门控残差机制对模型结构进行优化,使模型可以灵活的跳过无用的组件,提升模型的适应性;利用LSTM和改进的注意力机制进行局部和全局特征的提取,在充分挖掘数据中退化信息的同时提升模型对重要节点的检测能力;借鉴分位数回归的思想,对预测过程中的不确定性进行量化,通过对每次循环同时预测不同分位数水平的RUL,将原始的点估计拓展为区间估计,从而实现多尺度的预测。选用美国宇航局(NASA)航空涡扇发动机退化数据集C-MPASS完成了RUL预测方法的实验验证。
1 基于MSF预测模型的航空发动机RUL预测方法
基于多尺度融合预测模型的航空发动机剩余寿命预测方法流程如图1所示。首先,对数据集进行归一化和降噪处理,然后根据每次循环的飞行工况划分结果为数据集添加静态变量。其次,根据退化模型为训练数据集和测试数据集添加RUL标签。MSF预测模型的输入为静态数据、连续变量和离散变量,静态数据和离散变量需要进行“Label-Encoder”编码;而连续信号需要进行归一化处理从而消除不同量纲所带来的影响,根据时间窗的大小对每台发动机的时间序列进行划分,将生成的二维数据作为模型的输入。设置相应的batch进行训练,调整神经网络权重参数以最小化损失函数值。重复迭代,当损失函数值达到阈值或到达最大迭代次数时,结束模型训练。训练样本标记的剩余寿命值作为模型的目标输出。将测试集输入该模型,得到相应的测试结果。

图1 基于MSF预测模型流程
1.1 数据预处理
本文中使用NASA提供的C-MAPSS数据集,数据集根据不同操作模态和故障数目分为4个子集FD001~FD004。每个子集均由训练集和测试集组成,记录了若干个发动机从性能正常状态到性能失效状态期间飞行循环的监控数据,详细设置如表1所示。每个飞行循环的监测数据由26维特征数据构成,其中前两维分别表示发动机(单元)编号和循环编号,接下来三维为飞行工况(飞行高度、马赫数和油门杆解算器角度),余下的21维数据是监测数据。
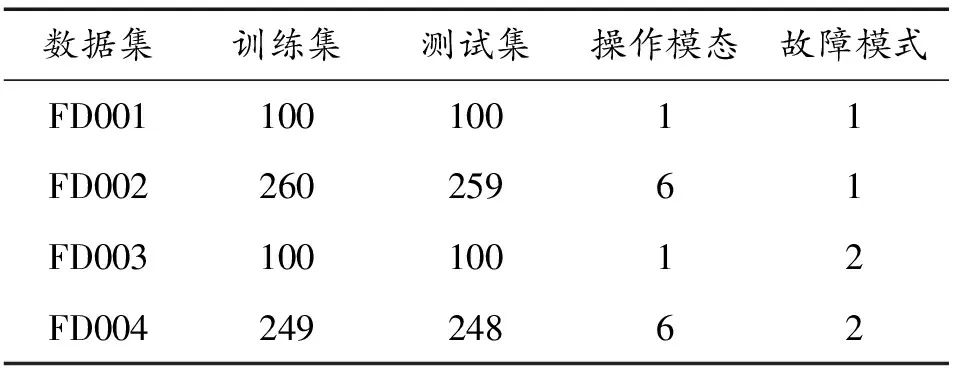
表1 C-MAPSS数据集
数据的归一化与降噪处理:不同传感器观测值的量纲和量纲单位往往是不同的,直接使用不仅会影响数据分析的结果,还会影响到模型收敛的速度和精度。为了消除这种影响,使用Min-Max方法对传感器数据进行归一化处理。同时,为了消除噪声的影响,使用窗口长度为53、多项式阶数为3的Savitzky-Golay滤波器对传感器数据进行平滑处理。
数据重构:对于同一发动机而言,不同飞行工况下其对应的监测数据往往处于不同的水平。对于不同发动机而言,相同的飞行工况其监测数据往往具有更大的相似性。根据4个子集的操作模态数目,使用K-means算法对3个飞行工况进行聚类分析,并将操作模态类别定义为静态数据,结果如表2所示。

表2 飞行工况划分
对于随时间具有明显增加或减少趋势的监测数据,将其定义为连续变量,进行归一化处理后作为输入。对于随时间没有明显变化的监测数据,将其定义为离散变量。结果如表3所示,其中离散变量中的括号代表该监测数据分为几类。

表3 监测数据划分
退化模型:通过航空发动机退化模式的观察发现,航空发动机在运行初期磨损较小,运行状态稳定,性能基本不退化,可认为此阶段的发动机剩余寿命保持恒定。因此,在退化之前估计RUL是不合理。为更准确的模拟发动机的真实退化过程,分段退化模型被广泛用于预测研究[20-21],本文参考Huang等[22]的实验结论,将最大剩余寿命设定为130。
1.2 MSF预测模型
MSF预测模型主要包括4个部分(静态协变量编码、变量选择、局部特征提取、全局特征提取),通过静态协变量编码网络将静态数据的特征集成到模型中;变量选择类似于主成分分析,按照输入数据对于预测目标的重要程度,对每次循环的监测数据进行即时选择,此外,它还可以降低不必要的噪声对于预测的影响;局部特征提取主要处理的是经过变量选择的监测数据,受原始数据影响大,因此更易捕捉局部信息;而全局特征提取处理的是局部特征提取的输出状态,由于抽象层次更高,受原始输入影响较小,所以更易捕捉到全局性的信息;各个部分之间通过门控残差机制进行连接以提升模型深度和复杂度的适应性。多尺度融合时序预测框架结构如图2所示。

图2 多尺度融合预测模型
1.2.1门控残差机制
门控残差机制(GRM)是MSF预测模型的基本结构之一。它主要由门控机制和残差连接构成。门控机制主要是对输入数据进行特征选择,通过在特定场景下对特定数据集进行学习,来抑制无效特征的输入。而残差连接可以使网络适应不同的深度和复杂性,提高信息在网络中传递的效率。
门控残差机制结构见图2。可以表示为:
1.2.2变量选择网络
变量选择网络 (VSN)是MSF预测模型的一个重要组成部分。不仅可以对每次飞行循环输入的编码向量进行评估,按照其对预测目标的重要程度进行变量选择;还可以消除由于多源输入所带来的各种噪声,提高模型的性能和鲁棒性。

第一部分主要对输入进行非线性处理和特征选择,可以表示为:

第二部分主要是生成各变量对应的权重,可以表示为:
式中:Ξ∈RdEmbedding×j为将编码向量“展平”后的向量;Φt为经过Softmax 激活函数映射的变量选择权重,对于监测数据的选择需要静态协变量的辅助。

式中:ξt∈Rdhidden为第t次飞行循环经过变量选择网络选择的特征向量。
1.2.3静态协变量编码网络
在时间序列预测过程中,不仅监测数据与预测目标具有复杂的关系,一些静态数据对预测目标也具有重要的影响。本文通过静态协变量编码网络(SCCN)生成scs、sce、scc、sch四类静态协变量,并将其连接到模型的不同位置,辅助时间依赖变量进行预测。其中,scs用于变量选择网络;scc、sch用于局部特征提取网络;sce用于全局特征提取网络。以scs为例,具体公式为:
1.2.4基于LSTM的局部特征提取网络(LFEN)
在时间序列数据中,重要时间节点通常与其周围值相关,例如异常点、变化点以及周期模式等。因此,通过构建逐点值之上的LSTM神经网络,可以提高模型退化拐点的检测能力,以及航空发动机退化过程中局部退化特征的提取能力。此外,为了反映静态数据对于时间特征的影响,本文使用静态协变量编码网络产生的静态协变量scc、sch作为LSTM的初始隐藏状态和初始细胞状态。
1.2.5静态增强网络
由于静态协变量通常对时间动态具有显著影响,如不同操作设置对于发动机退化过程的影响等。因此,本文使用静态增强网络来提升模型捕捉时间特征的能力,可以表示为:
θt-n=GRM(ψt-n,ce)
(15)

1.2.6基于改进多头注意力机制的全局特征提取网络
由于注意力机制可以描述一个时间步长中所有时间点输入特征之间的关系,因此可以用于提取较长的时间特征。
与一般的多头注意力机制不同的是,本文首先采用缩放点积的方式计算各时间点之间的相关性,可以表示为:
Attention(Q,K,V)=AS(Q,K)V
(16)
其次为了更好的表征特定特征的重要性,对于不同的“头”共享价值权重,可以表示为:

式中:Wv∈Rdhidden×dhidden为所有“头”共享的价值权重;WH∈Rdhidden×dhidden用来对最后的结果进行线性映射。
为了便于训练,提升模型的适应性,类似于局部特征提取网络,本层也加入了门控机制和残差连接,可以表示为:

1.2.7损失函数
为了更好的进行决策和风险管理,本文在点预测的基础上进行了区间预测,采用分位数误差作为损失函数[15],通过在每次循环上同时预测不同的分位数(10th、50th、90th)水平的RUL来实现多尺度的预测。可以表示为:

(22)

2 实验验证
2.1 仿真条件
仿真的软硬件环境为NVIDIA GeForce RTX 3060 Laptop GPU、Intel Core i7-11800H CPU、32G RAM、Windows 11、Python 3.7,基于PyTorch框架。
经过反复测试,将时间步长设置为30、静态变量的嵌入维度设置为8、隐藏层维度设置为160、Dropout比率设置为0.3、LSTM层数设置为2、多头注意力机制的“head”数设置为4具有较好的预测效果。
2.2 评价指标
使用SF(评分函数)和RMSE(均方根误差2个指标来评价基于多尺度融合时序预测框架的航空发动机剩余寿命预测性能。
SF是一个非对称函数,经常用于评价剩余寿命预测的性能。对于航空发动机的剩余寿命预测,超前预测优于滞后预测,因此,在相同误差下滞后预测比超前预测受到更严重的惩罚。其函数表达式为:
相较于SF,RMSE对超前预测误差和滞后预测误差给予同等的惩罚。其函数表达式为:

2.3 实验结果
由于FD002和FD004子数据集具有多个操作模态,有利于验证静态数据对于模型预测的影响。因此,选用FD002和FD004子数据集的发动机RUL进行预测,每个子集进行5次有效实验,得出的每次预测的RMSE值和Score值,并计算平均值,结果如表4所示。

表4 RMSE、Score结果
为了验证所提方法的有效性,将其与文献[10]、文献[13]和文献[16-20]所提方法的预测效果进行对比,RMSE结果对比如表5所示,Score结果对比如表6所示。
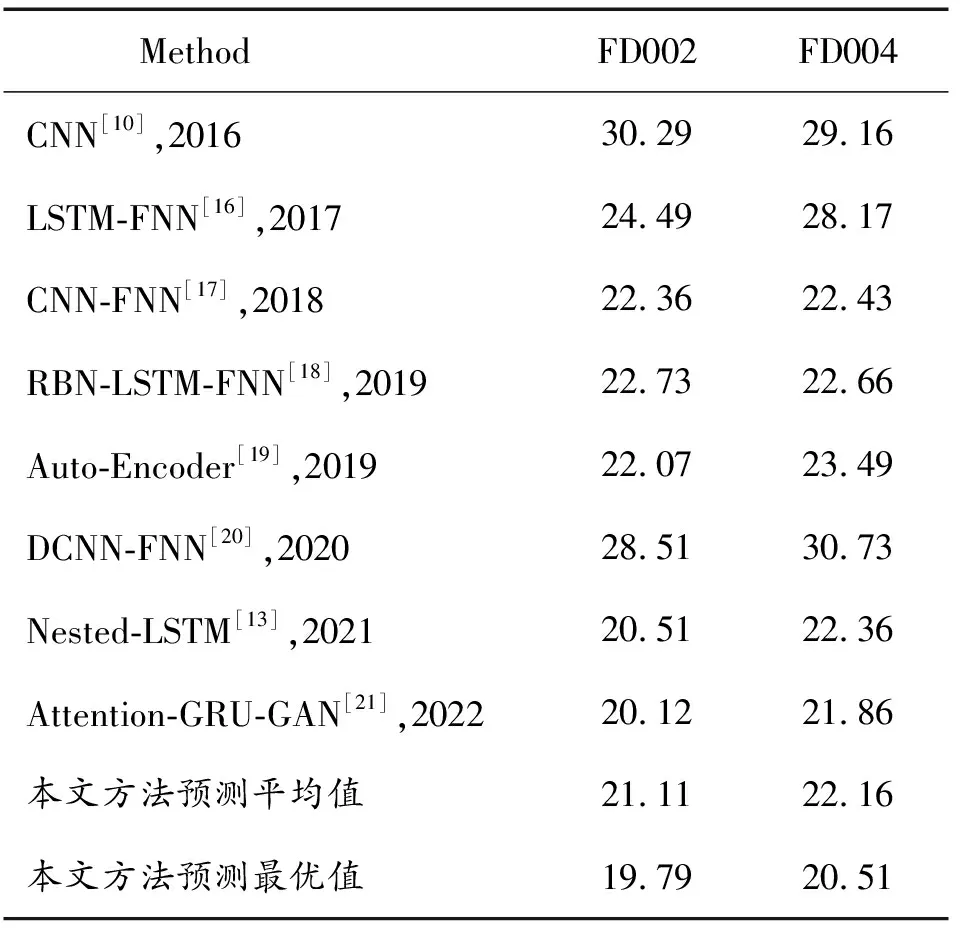
表5 不同方法的RMSE结果对比

表6 不同方法的Score结果对比
由表5可得本文所提方法在FD002测试集上预测的RMSE最优值相较于其他方法分别提高了34.66%、19.19%、11.49%、12.93%、10.33%、30.58%、3.51%和1.64%,平均提高15.54%;预测的RMSE平均值略低于Attention-GRU-GAN、Nested-LSTM方法,相较于其他方法分别提高了30.31%、13.80%、5.59%、7.13%、4.35%和25.96%。在FD004测试集上预测的RMSE最优值相较于其他方法分别提高了29.66%、27.13%、8.56%、9.49%、12.69%、33.26%、8.27%和6.18%,平均提高16.91%;预测的RMSE平均值略低于Attention-GRU-GAN方法,相较于其他方法分别提高了24.00%、21.30%、1.21%、2.21%、5.66%、27.89%和0.89%。
由表6可得本文所提方法在FD002测试集上预测的Score平均值和最优值相较于前6种方法均提高了90%以上,与Nested-LSTM方法相比平均值和最优值分别提高了63.51%、71.14%,与Attention-GRU-GAN方法相比平均值和最优值分别提高了27.32%、42.52%,平均提高83.21%。在FD004测试集上预测的Score平均值和最优值相较于前6种方法均提高了75%以上,与Nested-LSTM方法相比平均值和最优值分别提高了63.86%、69.72%,与Attention-GRU-GAN方法相比平均值和最优值分别提高了53.36%、60.92%,平均提高78.78%。
为了进一步观察本文所提方法的预测效果,图3展示了2个测试集所有发动机RUL预测值和真实值的对比结果,其中,FD002、FD004测试集真实RUL超出预测区间的数目分别为21、19,分别占其总发动机数目的8.1%、7.6%,可以看出预测值与真实值之间误差较小,精度较高。选取FD002中具有最长测试循环的发动机(ID:65)、具有最短测试循环的发动机(ID:121)以及随机一台发动机(ID:33);FD004中具有最长测试循环的发动机(ID:232)、具有最短测试循环的发动机(ID:198)以及随机一台发动机(ID:224),给出其全测试循环的寿命退化预测结果。如图4所示,对于寿命最长的发动机,FD004中的第232号发动机虽然已进行了339次循环,但其仍然处于未退化阶段,预测过程出现几次波动,但真实RUL均落在预测区间内。FD002中的第65号发动机在预测中期出现较大波动,但基本退化轨迹与真实RUL保持一致。对于寿命较短的发动机,其退化过程非常快,早期预测结果并不好,预测区间宽度较大,最大区间长度分别为128、116,但随着监测数据的不断输入,预测结果得到改善,最后一次循环的预测区间长度分别为49、2。因此,本文所用方法在单个发动机的RUL预测中也具有一定优势,退化趋势拟合较好。
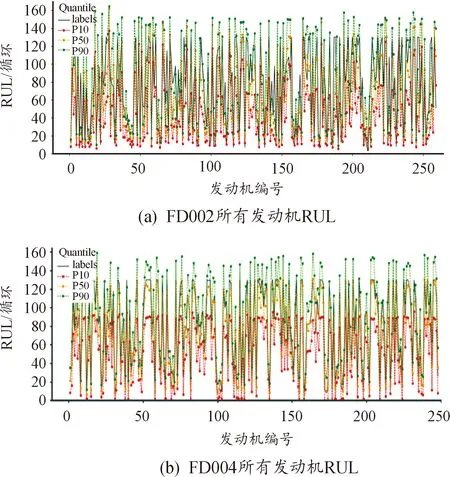
图3 测试样本真实RUL与预测RUL对比图
3 结论
本文针对传统深度学习方法在航空发动机RUL预测中忽视静态数据对于RUL的影响以及特征识别和提取不充分的问题,构建了基于静态协变量编码网络、静态增强网络以及LSTM的网络模型,并融入了门控残差机制和改进的多头注意力机制,提升了RUL预测性能,得到如下结论:
1) 采用静态协变量编码网络将静态数据特征融入到网络模型中,将生成的4类静态协变量连接到模型的不同位置,提升了模型捕捉不同尺度时间特征的能力,解决了特征识别和提取不充分的问题。
2) 采用变量选择网络对网络中输入的特征按照不同的权重进行筛选,充分利用重要的数据信息,提高RUL预测精度。
3) 采用门控残差机制进行模型各组件之间的连接,提升模型对于网络深度和复杂度的适应性,保证了有效特征向后传递的效率。
4) 在不确定性管理方面,采用分位数误差作为损失函数,实现了点预测向区间预测的扩展。
