逆向工程技术在水表开发领域的研究
2023-08-02张伟东许学文蒋彦华
杨 滨,张伟东,许学文,蒋彦华,朱 斌
(宁波水表(集团)股份有限公司,浙江 宁波 315032)
0 引言
水表计量精度的失准已经逐渐成为供水企业计量工作的难点。由水表计量精度偏差引发的水资源浪费不容忽视。水表的精准性直接关乎水资源的有效利用,也是可持续发展的重要要求,与每个用水单位息息相关。
在国家政策和节能环保要求的指引下,越来越多的水务公司和用户意识到节约用水的重要性。受到污水处理费用、水资源价格不断上涨等因素的影响,水务公司管理工作面临着困难和挑战。
本文采用逆向工程技术对表壳和叶轮等水表重要零件进行三维模型重建,着重分析逆向工程应用于复杂零件再造的关键技术。该技术的研究对提高水表零件的检测和制造精度具有重要意义[1],可有效缩短水表零件的设计周期,为实现水表零件数字化检测提供了参考[2]。
1 逆向工程概述及测量选型
逆向工程又称反求工程、反向工程。 逆向工程是传统产品设计(正向工程)的相对概念。 逆向工程是以已有产品和资料为基础,对其进行消化吸收、改革创新、改进优化的生产过程[3]。逆向工程可以优化产品设计、制作替换部件、设计新产品。
逆向工程特征提取指通过测量设备把产品表面形状转化成离散的几何坐标数据,并以点云数据来表示实物模型的几何特征[4]。常用逆向工程测量方法分类如图1所示。
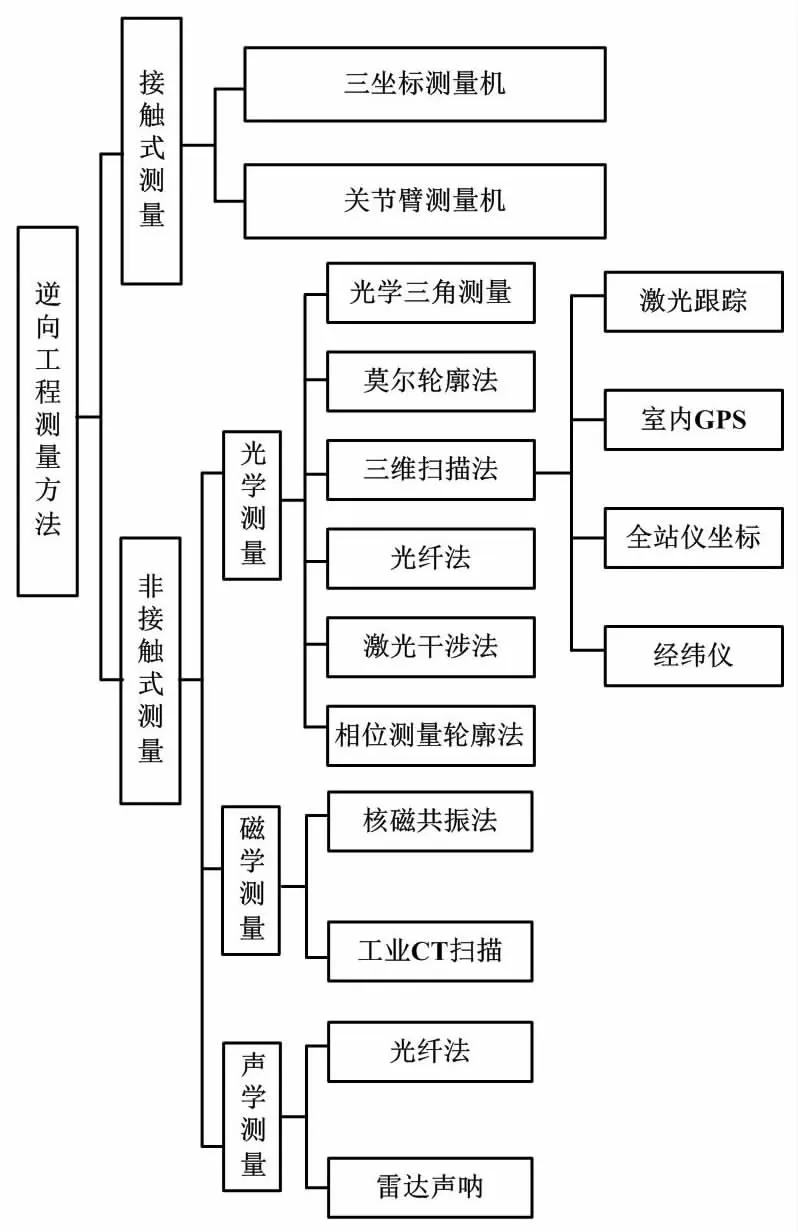
图1 常用逆向工程测量方法分类
根据表壳的结构特点,表壳选取三坐标测量机进行测量。三坐标测量机具有精度高、可测量结构复杂和不规则的工件等优点。叶轮选取三维扫描法进行测量。三维扫描法的优势是非接触式扫描、速度快、数据全自动拼接、测量精度高、便携式设计、操作简单、输出数据接口广泛。
2 三坐标测量机的技术原理及应用分析
2.1 技术原理
三坐标测量机是在三维可测的空间范围内,根据测头系统返回的点数据,通过三坐标的软件系统计算各类几何形状、尺寸等测量能力的仪器。三坐标测量机集光学、机械、电子、计算机和数控技术于一体,是自动化、高精度、多功能的接触式测量仪器[5]。
三坐标测量机具有自动化和数字化程度高的特点,不仅可以大幅提升测量工作速度,而且能显著提高测量精度,是目前设计、检验等领域中较为主流的一款测量设备[5]。
2.2 应用方法
水表表壳因曲面和水流流道形状相对复杂,如采用非接触式测量方法则无法准确测量出所需数据。因此,本文采用接触式测量方法。以下具体介绍接触式测量方法对表壳型面特征提取、数据处理的过程。
表壳测量要根据探针选用、测量基准选择、测量点数及测量位置规划等各种因素统一考虑,以保证测量结果的准确性和测量效率[6]。
大部分表壳材质为黄铜。黄铜是由铜、锌组成的合金。选取的探针要求与表壳材质不发生干涉,使提取的特征为所要测量的实际数据。测量时,探针接触应尽可能沿法线方向、所接触的点应尽可能为最大分布、选取的点应尽可能多,从而使提取的特征更具代表性[6]。三坐标测量机工作流程如图2所示。
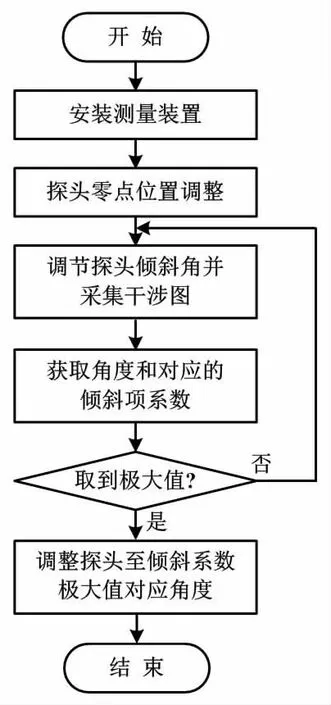
图2 三坐标测量机工作流程图
三坐标测量机获得表壳点阵数据的步骤为:首先,借助逆向工程软件(如Imageware surfacer等)读取点阵数据;接着,创建曲线、建立曲面等,完成数据处理并转换成通用格式;然后,导入三维设计软件(如Solidworks等),对数据进行光顺、延伸、剪切等处理,完成实体的再设计过程;最后,得到表壳的管理软件计算机辅助设计(computer aided design,CAD)模型[7]。
表壳拟合曲线如图3所示。

图3 表壳拟合曲线
表壳CAD模型如图4所示。
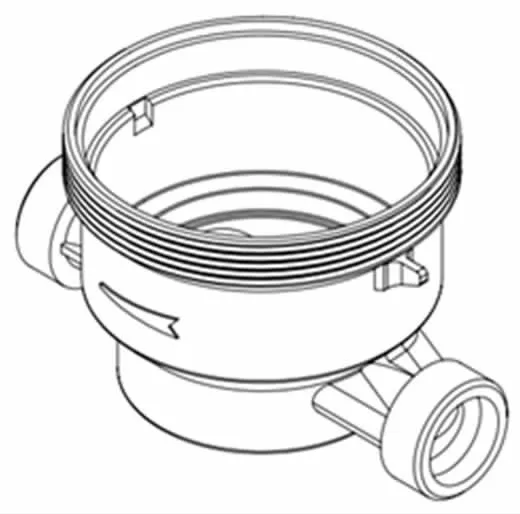
图4 表壳CAD模型
2.3 偏差分析
在特征提取、曲线拟合以及数据处理过程中,不可避免地会出现精度偏差和模型失真,所以有必要对重建的模型进行精度分析。本文运用三维软件中的特征比较功能,实现理论数据与逆向工程测量数据的比较;通过直观的色彩偏差图,实现模型的偏差分析。
3 三维扫描法的技术原理及应用
3.1 技术原理
三维光学扫描技术是集光、机、电及分析和数据处理于一体的多功能集成耦合技术,主要用于对物体空间外形、结构尺寸和色彩进行扫描测量,以获取被测物体的实体几何数据参数[8]。其实际意义在于将实物的立体几何信息转换成计算机能直接处理的数字信号,为被测物体特征提取、数据处理和产品的数字化设计及制造提供了方便、快捷的解决方案。
三维光学扫描仪为非接触测量,以其扫描范围大、速度快、精度高、扫描的点云杂点少、系统内置标志点自动拼接、自动删除重复数据、操作简单、价格低等优点而在产品设计中得到越来越广泛的应用。
三维光学扫描仪的扫描过程基于光学三角测量原理。其步骤为:首先,投影模块将一系列编码光栅投影到物体表面;然后,由采集模块得到相应被调制的图象;最后,通过特有的算法获取点云数据的三坐标位置,并在扫描仪软件中转换成数字格式。这种数字格式常以三维多边形网格形式呈现,是创建CAD模型的尺寸依据。
三维扫描数据优化流程如图5所示。
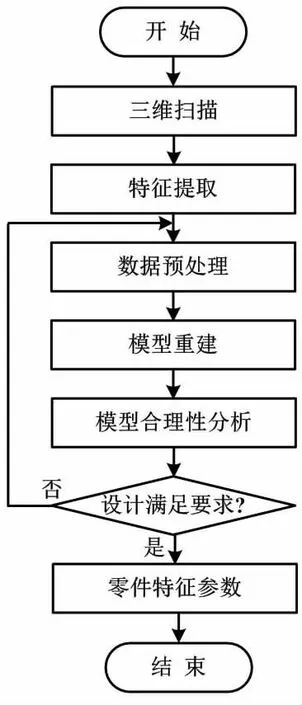
图5 三维扫描数据优化流程图
图5中,数据预处理包括拼接、降噪和精简。
3.2 特征提取
三维光学扫描仪对叶轮进行扫描前,需要在叶轮表面贴标记点,以便在扫描时进行空间定位[9]。使用三维光学扫描仪需选定一个稳定的工作环境。扫描过程中不可出现震动。环境光线不要太强,最好选择在暗室操作,以避免额外光线对扫描仪的干扰。被扫描物体和镜头距离要适中。结构重叠部分应尽可能减少扫描次数。数据多次拼接会使累计误差增大。做到以上几点,就能有效提高测量精度。
3.3 数据处理
根据叶轮特点,扫描仪从不同角度对物体外形及内部结构进行扫描。重复扫描操作,即可提取完整的特征。本文利用迭代就近点(iterative closest point,ICP)算法对点云进行拼接[10]。该算法主要用于三维空间中的点云配准,适用于平面、曲线和曲面等各种场景。当点云配准的精度未满足设计要求时, ICP 算法可在不断的迭代中降低误差,以实现理想的数据处理结果。开始的粗略匹配为之后的精准匹配提供了较好的定位点。ICP算法的作用为进一步缩小误差,使数据处理结果无限接近实物的外形轮廓。
预处理后的叶轮点云如图6所示。
图6 预处理后的叶轮点云
3.4 模型重建
CAD模型重建是逆向工程的关键技术。CAD模型重建主要通过逆向工程软件对预处理后的点云数据进行拟合,并对所建立的模型进行编辑操作,如拼接、过渡和剪切等,从而实现重建模型。
叶轮CAD模型如图7所示。

图7 叶轮CAD模型
曲面用以非均匀有理B样条(non-uniform rational B-splines,NURBS)为基础的建模方式。相比传统的网格建模,NURBS能更好地控制物体表面的曲率,使实物的造型更加生动、逼真,是现代曲面造型中应用广泛的技术[11]。
4 结论
逆向工程根据现有的实体,采用有效的工具和方法测量其外形坐标点数据,再根据所得数据构建出实物的几何模型。实物原型的再现仅仅是逆向工程的初步阶段,在此基础上进行基于原型的再设计、再分析、再提高,从而实现重大改型的创新设计,才是逆向工程的真正价值和意义所在。
本文首先采用三坐标测量机和三维扫描法分别对水表表壳、叶轮进行特征提取;接着利用软件对所得数据进行处理,得到可视化的误差分析;然后重建模型对模型的合理性进行评估;最后得到零件的特征参数,导出所需的CAD图纸。本文使用逆向工程技术成功开发出具有市场竞争力的水表,为后续的产品开发提供指导和借鉴。
