一种改进的永磁同步电机有限集模型预测控制方案设计与实施
2023-08-01吴景红
吴景红
(国能神东煤炭集团有限责任公司,陕西 榆林 719315)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)有着功率密度高、结构简单等优点,被广泛应用于电力机车、航空航天等领域[1]。这些领域对于PMSM的控制精度有着更高要求[2]。为了提高PMSM的控制性能,一些学者提出更高性能的控制策略,其中最受关注的是有限集模型预测控制(Finite Control Set Model Predictive Control,FCS-MPC)。
FCS-MPC通过计算代价函数获得最优电压矢量从而实现对PMSM的控制[3]。根据控制目标的不同,代价函数中可以包含多种限制条件[4]。由于FCS-MPC方案存在依赖精确的PMSM数学模型、无法调整控制侧重等问题,导致电流和转速脉动较大、动态响应慢、开关次数高[5-7]。LIU等设计了比例积分形式的代价函数用于消除参数不匹配带来的稳态误差,但是积分系数的设计需要大量试验经验[8]。LI等对控制集中的电压矢量进行扩张以提高控制精度,该策略并未降低FCS-MPC对参数依赖,还带来了计算量大的问题[9]。
FCS-MPC方案的代价函数通常由参考电流和实际电流的偏差组成[10]。提升参考电流预测精度可以有效降低电流与转速脉动[11]。FCS-MPC方案对下一时刻所需要的参考电流进行预测时,通常仅考虑当前时刻PMSM的实际运行状态。灰色预测(Grey Model,GM)可以利用系统历史信息进行建模,将控制系统中的灰色部分进行白化[12-13]。孙波等将灰色预测运用于轨道电路红光带现象的预测,起到降低相对误差、提高预测精度的作用[14]。灰色预测与控制对象的参数无关,因此不会受到参数扰动的影响[15]。文中建立灰色预测模型,针对因参数扰动而产生的电流偏差进行预测,从而实时补偿。
代价函数中各项权重系数的不同组合会影响系统的控制性能[16-18]。因此权重系数的确定对于控制效果的优劣有着重要影响。传统的FCS-MPC方案通过大量仿真与试验确定一组最优的固定权重因子[19]。固定的权重因子无法同时实现较好的动态性能与稳态性能[20]。若不能根据电机运行工况及时调整权重系数,还会导致逆变器开关次数多的问题。过高的开关次数会导致逆变器发热严重、引发电流谐振。一些学者设计新的权重系数调优方案。LIU等提出一种通过数学推导计算权重因子的方案,无需通过大量对比仿真即可寻找到最优权重因子[21]。WANG等设计了一种粒子群寻优算法以根据d轴和q轴电流稳态误差动态调整代价函数各项权重系数的控制策略[22]。这2种方案均存在计算量大的问题,不利于算法的在线实施。文中针对FCS-MPC开关次数多的问题,提出将模糊算法应用于动态调整代价函数各项权重系数的方案。
主要贡献可总结如下:①针对FCS-MPC方案受参数扰动影响较大的问题,在其电流内环中引入GM方案,通过分析系统历史信息,获得不受参数扰动影响的参考电流;②设计可根据PMSM运行工况动态调整代价函数各项权重的模糊控制器,形成动态代价函数以选出更符合期望的电压矢量。
1 FCS-MPC控制方案
1.1 PMSM数学模型
PMSM是一个强耦合、多输入的非线性系统。根据永磁体在转子上安装方式的不同,三相永磁同步电机可分为表贴式永磁同步电机和内置式永磁同步电机。表贴式永磁同步电机多应用于高功率密度场合,选取表贴式永磁同步电机作为研究对象,其d-q坐标系下的数学模型为
(1)
(2)
式中ud,uq分别为对应的d轴、q轴电压,V;ωe为电角速度,ωe=pωr,rad/s;ωr为转子角速度,rad/s;p为转子极对数;ψd,ψq分别为d轴、q轴磁链,Wb,其中ψd=Ldid+ψf,ψq=Lqiq;ψf为永磁体磁链,Wb;id,iq分别为对应的d轴、q轴电流,A;R为定子电阻,Ω。文中的研究对象为表贴式永磁同步电机,因此有Ld=Lq=L,H。
运用三相两电平逆变器为PMSM供电,拓扑结构如图1所示。该逆变器共包含3个桥臂,分别代表ABC三相,每个桥臂上有2个开关,共有6个开关,分别定义为SAp、SBp、SCp、SAn、SBn和SCn。为避免短路,同一桥臂上的2个开关不能同时导通。用数字“1”和“0”分别代表开关的导通与关断。这些开关状态组成8种可能的电压矢量,其中包含6个非零电压矢量与2个零电压矢量。这些电压矢量对应的相电压可以由式(3)计算得出

图1 两电平馈电的PMSMFig.1 Two level fed PMSM
uaO,i=SAp,iUdc;i=0,1,…,7
ubO,i=SBp,iUdc;i=0,1,…,7
ucO,i=SCp,iUdc;i=0,1,…,7
(3)
式中uaO,i,ubO,i,ucO,i分别为ABC三相的相电压,V;Udc为直流母线电压,V。当第i个电压矢量作用于逆变器时,其输出电压Vi如下式
(4)

1.2 FCS-MPC方案
PAN等提出在速度环引入MPC控制器可以有效消除转速超调,研究重点集中在电流内环,因此不再详细论述[23]。电流内环MPC控制器根据PMSM数学模型和当前时刻的系统状态可预测出下一时刻的期望电流。对定子电流的求导采用欧拉近似法可得
(5)
式中T为采样时间,s。预测定子电流表达式如下
=F(k)x(k)+G(k)u(k)+H(k)
(6)
利用上式可分别预测出8种电压矢量在下一时刻可能产生的定子电流。电流控制的目标是最小化参考电流与实际电流间的偏差。根据这一目标可以构建代价函数如下

(7)

n=|SAp(k)+SAp,i(k+1)|+|SBp(k)+
SBp,i(k+1)|+|SCp(k)+SCp,i(k+1)|
(8)
式中SAp(k),SAp,i(k+1)分别为当前时刻和下一时刻逆变器A相上半桥臂开关状态。为了确保设备安全,设计非线性方程以限制定子电流幅值,如下式
(9)
现将FCS-MPC方案总结如下,该方案控制框如图2所示。

图2 FCS-MPC方案控制框Fig.2 Strategy control of FCS-MPC
方案1
离线阶段:
2)设定模型参数:母线电压Udc、极对数p、定子电阻R、d轴与q轴电感Ld,Lq。
在线阶段:
2)根据式(5)~(7)计算出8个候选电压的代价函数值;
3)选择代价函数值最小的候选电压矢量作为最优电压矢量;
4)将最优电压矢量对应开关状态输送给逆变器。
FCS-MPC方案的控制精度依赖PMSM数学模型的参数准确性。但是在实际运行中,这些参数容易受到温度、工况的变化而产生改变,从而使得 FCS-MPC方案的控制效果变差。GM方案是根据系统的历史信息进行预测的,不受电机参数变化的影响。引入GM方案可有效降低电流脉动,减少参数变化对控制精度带来的影响。
2 改进控制方案
2.1 基于灰色预测的PMSM控制方案
GM将混乱、没有规律的历史信息通过累加、累减等手段生成有规律的数列,对系统扰动进行预测并有针对性地对其补偿。FCS-MPC方案确定最优电压矢量时仅考虑当前时刻的状态,对电机参数准确度要求较高,未对历史信息进行充分利用。GM通过在计算参考电流时引入历史信息,减少对PMSM数学模型的依赖,从而选择出更准确的最优电压矢量,避免MPC中因为参数扰动带来的误差。
灰色预测模型的建立首先需要获得一组历史序列,如下式
(10)
式中n为所取历史序列的长度,上标“(0)”代表未经处理的历史序列;ki为控制系统所处时刻。利用式(11)对该序列的元素进行累加并组成见式(12)的新序列,可以消除数据的随机性和波动性。
(11)
(12)
式中 上标“(1)”代表经过累加的序列。
白化方程组如下式所示
(13)
式中a,b为待估参数。
通过最小二乘法可得待估参数a,b满足
(14)

解微分方程可得
(15)

(16)
根据式(16)可以得出,GM方案输出的q轴参考电流如下
(17)
灰色预测的引入可以有效提高PMSM抗干扰能力,减少电流脉动。将代价函数中q轴参考电流改为灰色预测得到更精确的电流,代价函数可以改写为
(18)
基于灰色预测补偿的控制方案可总结如下。
方案2
离线阶段:
2)设定模型参数:母线电压Udc、极对数p、定子电阻R、d轴与q轴电感Ld,Lq。
在线阶段:
3)根据式(5),(6),(18)计算8个候选电压的代价函数值;
4)选择代价函数值最小的候选电压矢量作为最优电压矢量;
5)将最优电压矢量对应开关状态输送给逆变器。
引入灰色预测方案对参考电流进行补偿可以有效减少参数扰动引起的电流脉动。虽然解决了方案1对参数依赖的问题,但是代价函数中固定的权重系数依然无法应对永磁同步电机复杂多变的工况,导致开关次数上升。过高的开关次数会导致逆变器发热严重,降低电能利用效率。但是传统方案存在无法根据电机工况动态调整权重系数、权重系数的确定依赖经验等缺点。为了解决这些问题,设计了模糊控制器以动态调整代价函数中各项权重系数。
2.2 基于模糊的动态代价函数
代价函数中每一项都有着不同的物理意义,对其分配不同的权重会影响最优电压矢量的选择,从而影响系统的动静态性能。权重系数的设置要求设计者在大量试验的基础上综合考虑系统的整体性能。固定的权重因子无法应对PMSM复杂多变的工况。为解决这一问题,设计了可以根据PMSM当前运行工况动态调整代价函数各项权重系数的模糊控制器。
模糊控制器输入变量为转速偏差Δω及转速偏差变化率Δδ,输出变量为代价函数各项权重系数Q1、Q2、Q3。转速偏差范围设为[-500,500],转速偏差变化率范围为[-5 000,5 000]。对输入变量和输出变量分别进行分级离散化可得,输入变量模糊集合为{NB,NM,NS,ZE,PS,PM,PB},输出变量模糊集合为{ZE,PS,PM,PB},模糊论域定义见表1。
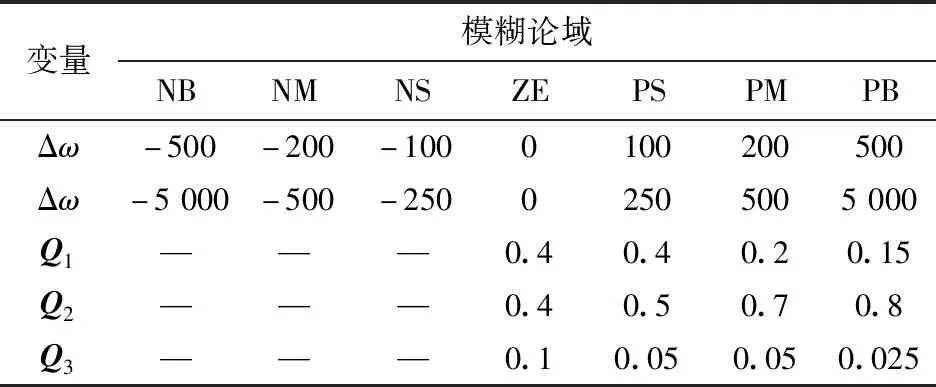
表1 模糊论域Table 1 Fuzzy domains
可以将整体的调整策略总结如下:当转速偏差和转速偏差变化率较大时,适当减小Q3,增大Q1,Q2;当转速波动值较大时,适当减小Q3,增大Q1,Q2;当转速偏差和转速偏差变化率均较小时,适当增大Q3,减小Q1,Q2。
根据上述调整策略设计的模糊推理规则详见表2。获取PMSM当前时刻的转速偏差和转速偏差变化率后即可进行权重系数的计算。根据模糊论域和模糊推理表即可设计对应的模糊控制器,实现对权重系数的动态调整。考虑到MPC会产生较大的计算量,研究选择计算量较小的重心法解模糊来计算输出量的精确值,其公式如下。
(19)
式中Qk为模糊控制器输出的精确值,k=1,2,3;MΔωe,i为根据隶属度函数计算出的Δω属于该等级的概率,i=1,2;MΔδ1为根据隶属度函数计算出的Δδ属于该等级的概率,i=1,2;Fx为根据Δω和Δδ在表2中选出的权重系数可能的4个取值,x=a,b,c,d。
基于灰色预测补偿和动态代价函数的PMSM控制框图如图3所示,该方案可以总结如下。

图3 控制方案框Fig.3 Control strategy
方案3
离线阶段:
2)设定模型参数:母线电压Udc、极对数p、定子电阻R、d轴与q轴电感Ld,Lq。
在线阶段:
3)根据模糊控制器计算并更新代价函数各项权重系数Q1、Q2、Q3;
4)计算8个候选电压的代价函数值;
5)选择代价函数值最小的候选电压矢量作为最优电压矢量;
6)将最优电压矢量对应开关状态输送给逆变器。
3 仿真与试验
3.1 仿真结果与分析
为验证所提方案的有效性,在Matlab中搭建仿真模型,电机仿真参数见表3。在初始时刻,电机由静止空载启动,设定目标转速为500 r/min,电机稳定运行后,在0.2 s突加2.4 N·m负载。3种方案的仿真结果如图4~6所示,具体的数据对比见表4。
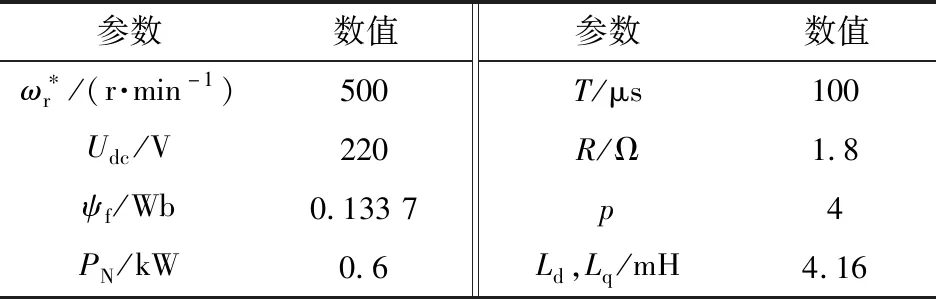
表3 仿真参数Table 3 Simulation indicators
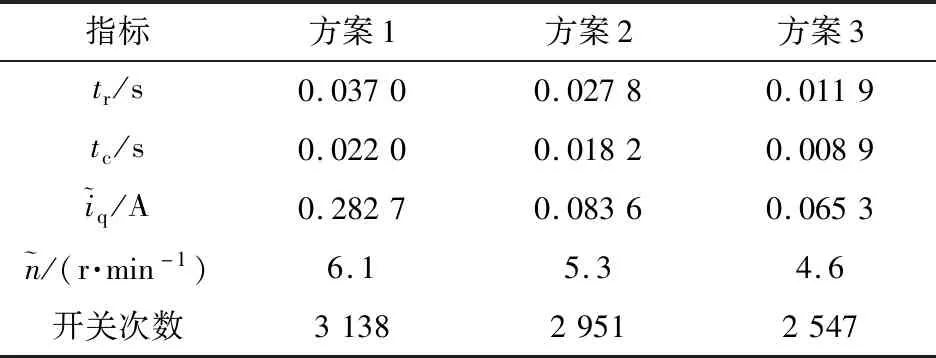
表4 仿真结果对比Table 4 Comparison of simulation results
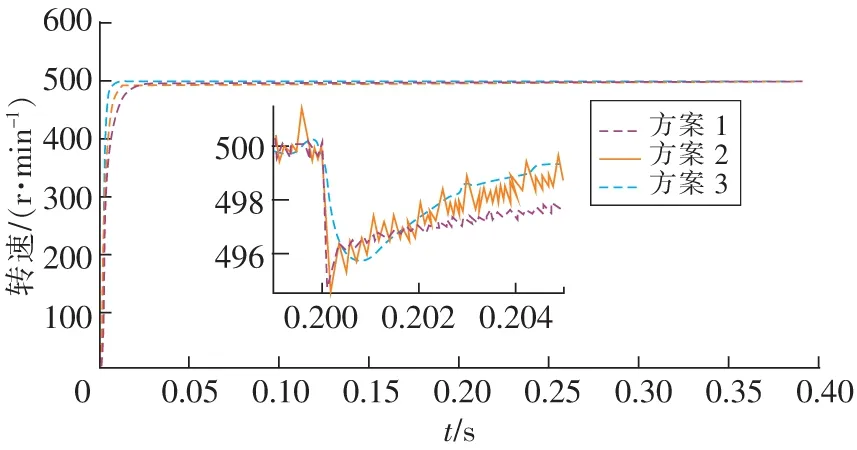
图4 3种方案转速仿真结果Fig.4 Simulation results of speed with three strategies

图5中展示的是3种方案的A相电流波形对比。可以看到方案2中A相电流谐波含量少于方案1,方案3的A相电流谐波含量最少。方案3的电机启动电流也比前2种方案小,在 0.005 4 s达到稳定。当突加 2.4 N·m的负载转矩后,三相电流能够最快地恢复稳定状态。

图5 3种方案A相电流仿真结果Fig.5 Simulation results of A phase current with three strategies


图6 3种方案q轴电流仿真结果 Fig.6 Simulation results of q axis current with three strategies
综上所述,灰色预测补偿方案可以有效降低q轴电流谐波含量,提高A相电流正弦度;引入模糊动态代价函数可以在较低开关次数的状态下实现较好的电流与转速控制效果。
3.2 试验结果与分析
为进一步验证所提方案的有效性,搭建了基于TMS320F28335的硬件试验平台,如图7所示。试验参数与表3保持一致。在硬件试验平台上分别测试3种方案的空载启动和突加负载时的控制效果。
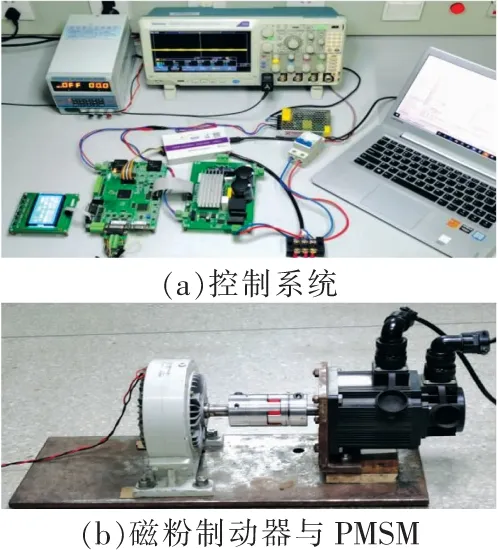
图7 试验平台Fig.7 Experimental platform
图8为3种方案的转速试验波形。从图8可以看出,当电机空载启动时,3种方案均不会产生超调。表5为试验结果的数值对比,通过对比可得,方案2和方案3的上升时间比方案1分别减少了16.7%和38.1%。当电机平稳运行后,利用磁粉制动器突加2.4 N·m负载。可以看到3种方案均产生转速波动。相比于方案1,方案2和方案3的速度恢复时间分别缩短12.1%和48.5%。试验结果表明与传统的FCS-MPC方案相比,文中所提的2种控制方案有更好的动态响应,方案3在速度响应时间和速度恢复时间方面明显优于方案1和方案2。

图8 3种方案转速试验结果Fig.8 Experimental results of speed with three strategies
图9为3种方案q轴电流试验波形对比。从图9可以看出,在突加负载后,3种控制方案的q轴电流都能很快地达到新的稳定值。而文中所提方案2与方案3由于采用灰色预测减小了参数扰动对控制效果的影响,所以电流波动呈现逐渐减小的趋势。具体的,取0.3~0.4 s的试验数据计算q轴电流波动可得,方案3的q轴电流脉动最小,相较于方案1和方案2分别减少了74.7%和17.6%。
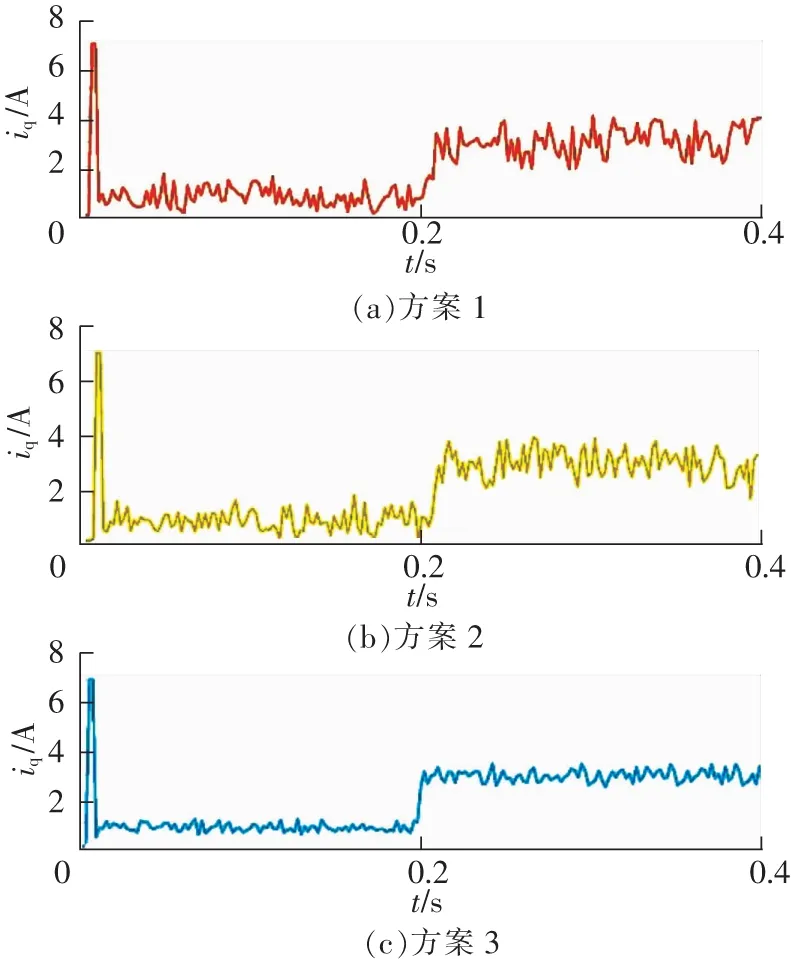
图9 3种方案q轴电流试验结果Fig.9 Experimental results of q axis current with three strategies
对比表5中开关次数的试验数据可得,方案3的开关次数是3种方案中最少的,相较方案1减少了16.5%。这是由于模糊动态代价函数中对开关项进行了优化。由上述控制效果的对比可以看出,方案3对开关次数的优化并未导致控制性能的降低。
进行试验时,参数扰动、电能质量等因素不可避免地会增大谐波含量,这些谐波与所提方案无关。
4 结 论
1)提出的改进FCS-MPC方案利用灰色预测算法可对系统中的历史信息进行充分利用的优点,提高了参考电流预测精度,降低了系统对参数的依赖;引入基于模糊的动态代价函数,避免了复杂的参数调优工作。
2)所提改进方案可选出更符合期望的电压矢量,从而降低电流脉动。模糊控制器可根据PMSM当前工况获取对应权重系数,实现控制性能和开关次数间较好的平衡。
3)永磁同步电机运行工况复杂多变,工况的变化不仅会影响控制侧重,而且会带来参数扰动。所提控制方案可有效缩短系统动态响应时间、降低逆变器开关次数。
