地铁隧道图像采集系统集成与病害检测技术
2023-07-30秦守鹏
秦守鹏
中国铁路设计集团有限公司, 天津 300308
截至2022年12月31日,中国内地累计有45个城市开通城市轨道交通,运营线路里程达到10 287.45 km,其中地铁占比77.84%[1]。根据在建线路以及规划获批线路的情况,未来五年城市轨道交通将持续保持大规模建设。随着大量地铁隧道的建设与投入运营,检测与维护需求非常大,受混凝土老化、膨胀收缩、受力变形等因素影响,地铁隧道表面会出现裂纹、渗水等病害。如果对病害不及时预警和处理,隧道结构健康状况会持续恶化,因此周期性地对隧道进行全面检测,对隧道维护和事故预防具有重要作用。
目前,地铁隧道巡检主要依靠人工,巡检人员在天窗内沿隧道行走,寻找裂纹或渗水病害,并人工记录相关数据。人工检测难以保证检测结果的完整性与准确性,并且检测效率低,已无法满足越来越高的地铁隧道检测需求。
随着计算机视觉技术的发展,采用移动平台搭载或集成工业相机,可以快速获取隧道内表面图像,通过对图像进行分析和处理,能实现隧道裂纹与渗水的高精度、高效率检测。
近年来,基于图像采集与处理技术进行隧道病害检测的研究已经非常多。本文通过梳理国内外已有研究成果,提出新的地铁隧道表观病害检测系统,并对其软硬件功能实现方法予以阐述。
1 研究现状
国外相关研究开展得较早,Ukai[2]研制了基于数码相机的隧道表面检测设备,检测速度10 ~ 30 km/h,检测精度约0.8 mm,并提出了检测设备与检测车集成的想法。Yu等[3]研制了针对混凝土裂缝的移动式检测系统,最高检测速度5 km/h,检测精度0.3 mm。该系统包括视觉系统、机械系统以及数字存储系统,采用编码器解决了相机扫描速度与检测设备行进速度不同步的问题。
西班牙Euroconsult公司研发了一套基于3D相机的隧道检测设备,将设备固定于轨道车上,可同时采集隧道2D图像和断面,最高检测速度30 km/h,图像分辨率为1 mm。瑞士Terra公司研发的隧道检测设备tCrack,检测速度2.5 km/h,检测精度0.3 mm,需安装在轨道车上通过轨道车供电。法国SITES公司研发的ScanTubes隧道检测系统适用于洞径25 m以下的隧道,可搭载于各类检测平台上,获取隧道表面图像和3D模型,实现表面病害检测和断面测量,最高检测速度5 km/h,检测精度:0.05 mm(距离2 m ),0.20 mm(距离6 m ),0.40 mm(距离10 m)。日本KURABO株式会社研发的TM‐270隧道检测设备,集成多个线阵相机,能检测多种类型隧道,最高检测速度20 km/h,检测精度1 mm。
国内在这方面的研究起步相对较晚,近年来也做了很多工作。王华夏等[4]采用12K高分辨率线阵相机设计了一套隧道图像采集系统,最高检测速度13 km/h,检测精度0.2 mm。黄宏伟等[5]研制的隧道检测车集成CCD线阵相机、红外相机、探地雷达等,最高检测速度5 km/h,检测精度0.2 mm。王耀东等[6-7]采用3个线阵相机和2个波长808 nm的红外光源,设计了一套可旋转调节的隧道图像采集系统,最高检测速度20 km/h,并研发了基于样本标注的隧道裂纹智能提取算法。毛庆洲等[8]融合三维激光点云与高清影像,研制了隧道结构一体化检测装备,检测精度0.3 mm。李健超等[9]研制的隧道检测系统,以轨道车为搭载平台,最高检测速度可达到80 km/h,检测精度1 mm,可满足高速、普速铁路的单双线隧道检测需求。
2 技术方案
受限于搭载平台与硬件水平,已有的检测系统存在体积和重量大、检测速度与精度无法兼顾的问题,实际应用效果并不理想。课题组将线阵工业相机和智能运动平台集成,研制了一款易于上线、轻量化、高精度的地铁隧道表观病害检测系统。智能运动平台采用四轮两驱动方式,通过多传感器融合与软件纠正,获得高精度的里程定位信息。在运动平台上搭载视觉检测模块,基于运动平台的运行与控制信息,对视觉检测模块进行精准的数据采集控制。
外业数据采集软件和作业管理系统采用人机交互的方式,操作人员可以通过无线网络设置参数和管理作业,一键完成全自动数据采集。
内业数据处理软件包括全自动的数据预处理模块与半自动病害提取模块。数据采集完成后,从运动平台的工控机中导出完整的工程文件,通过数据处理软件的预处理模块一键完成预处理,然后软件自动分级显示拼接后的图像,通过人工交互半自动提取渗水、裂纹等表面病害,最终输出检测报告,从硬件集成到软件研发,从数据采集到数据处理,形成了一套完整的隧道检测方案。
3 系统硬件
检测系统采用模块化设计,由便携式电脑操控,工作温度在-10 ~ 45 ℃,可连续4 h自动运行。通信方式采用无线局域网,整体质量小于60 kg。该系统可对隧道壁表面与轨道表面全覆盖检测,最高检测速度5 km/h,检测精度为0.2 mm,里程定位精度为1/2 000。系统硬件由拱顶检测模块、轨道面检测模块和智能运动平台组成。整套系统的组成见图1。

图1 整套系统组成
1)拱顶检测模块
由于地铁隧道大多为单线圆形盾构隧道,若采用常规的阵列式相机采集图像,至少需要6个相机和光源,无法实现轻量化。采用单相机旋转扫描,将线阵相机和光源安装在一个旋转平台上,通过以太网和交换机,将相机接入工控机,由工控机中的采集软件采集图像。线阵相机需接收编码器输出的脉冲信号,用来触发线阵相机均匀拍照,同时还需接收Stm32控制板的信号。Stm32控制板接收编码器信号,并推算编码器当前的旋转角度,给线阵相机输出是否拍照的信号。线阵相机旋转采集数据流程如图2所示。
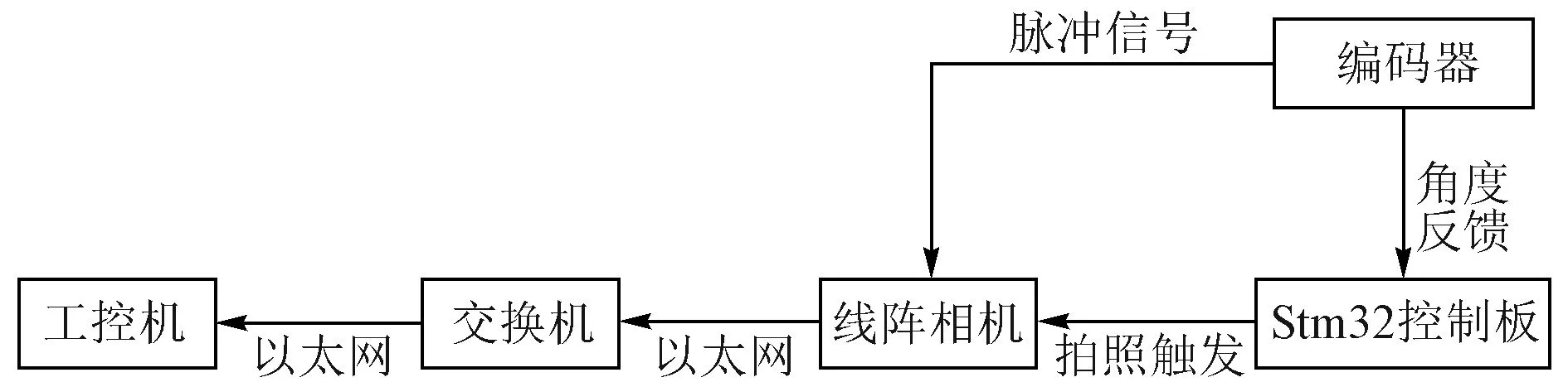
图2 线阵相机旋转采集数据流程
拱顶检测模块采用两根高强度碳纤维管作为支架,支架一端通过固定座与小车主体连接,连接部分按易拆卸设计;另一端与线阵相机底座板固定连接。在底座板上安装导电滑环、驱动电机、工业相机、照明光源等,其中照明光源采用LED(Light Emitting Diode)光源。
2)轨道面检测模块
两个轨道面检测模块分别固定在小车主体两侧,采集左右轨道面数据。轨道面检测模块采用一根碳纤维管作为支架,支架一端与小车主体连接,连接部分按易拆卸设计;另一端与相机底座板固定连接。
3)智能运动平台
智能运动平台包括小车主体、走行机构、工控机等。小车主体由两个电气控制仓和两根碳纤维连接杆组成。电气控制仓内主要安装电池、变电器、工控机、电机驱动模块、无线通信模块等。两个行走机构分别固定在小车主体的两侧,包括两个主动轮、两个从动轮、与小车主体连接的固定座、车轮编码计、刹车器、驱动器、限位轴承等。工控机采用Linux系统,将采集控制软件部署在工控机上,操作人员用便携式电脑,通过无线局域网连接工控机,可设置任务参数,实现数据自动采集。采集的数据保存在大容量、高速存储硬盘上。
4 系统软件
4.1 外业数据采集软件
外业数据采集软件是一个分布式的软件系统,主要包括运动控制模块、数据采集控制模块、数据存储管理模块、信息交互模块等。各模块独立运行,通过第三方组件ActiveMQ消息中心进行通信交互,通过定制化的数据接口进行数据交互,实现位置服务、环境监控、状态监控、数据采集控制等。采用MySQL数据库存储工程作业信息、文件索引等,采集的图像文件存储在Linux文件系统中。
4.2 内业数据处理软件
4.2.1 数据预处理模块
数据预处理流程如图3所示。
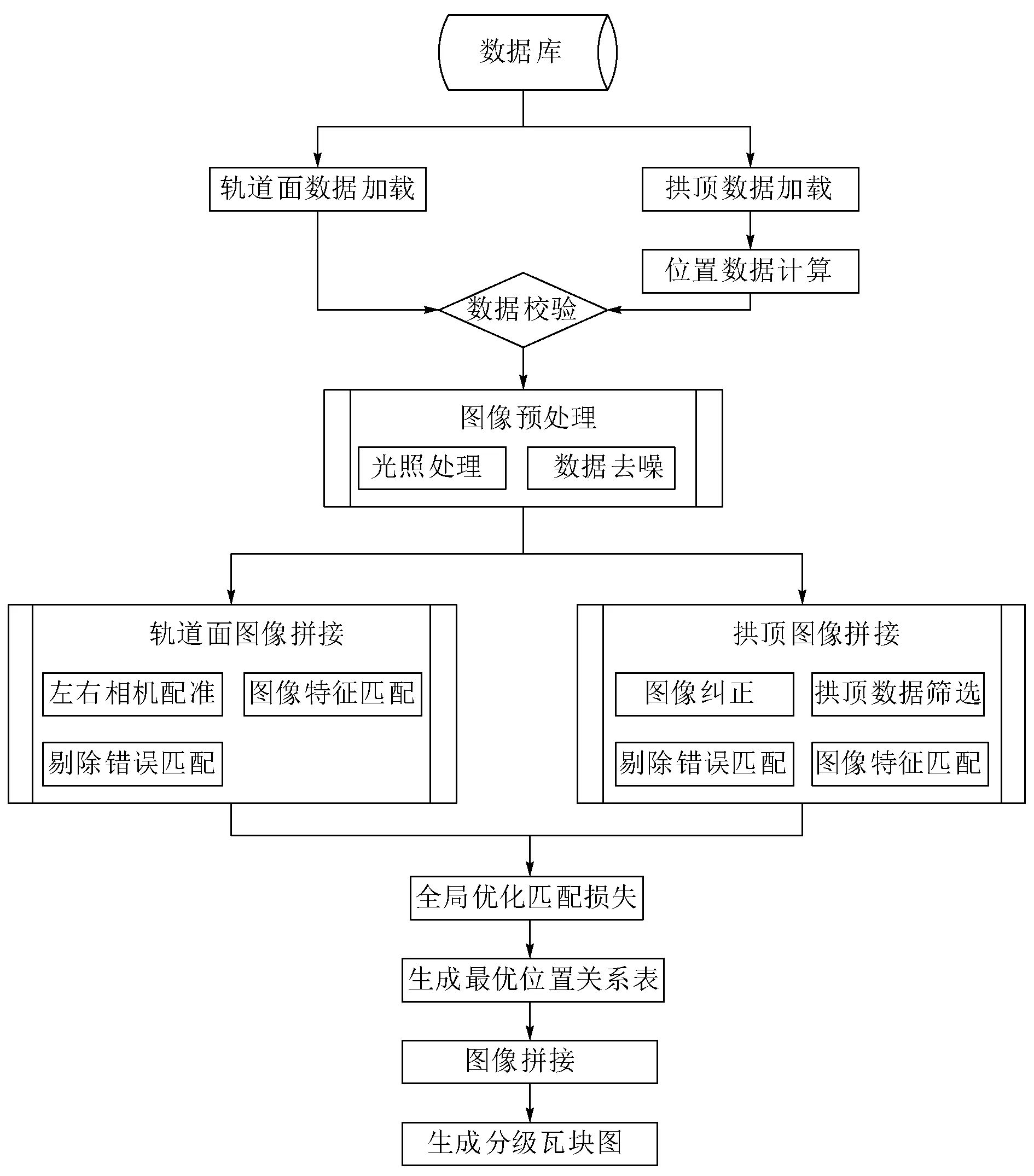
图3 数据预处理流程
数据预处理模块主要包括以下功能:
1)数据加载与校验
从工控机内导出完整的工程文件,加载数据记录文件(.xml格式)和原始图像数据,校验工程文件数据的完整性。
2)图像光照处理
针对隧道内较暗的情况,采用直方图均衡化算法对图像进行增强处理。图像处理前后对比见图4。
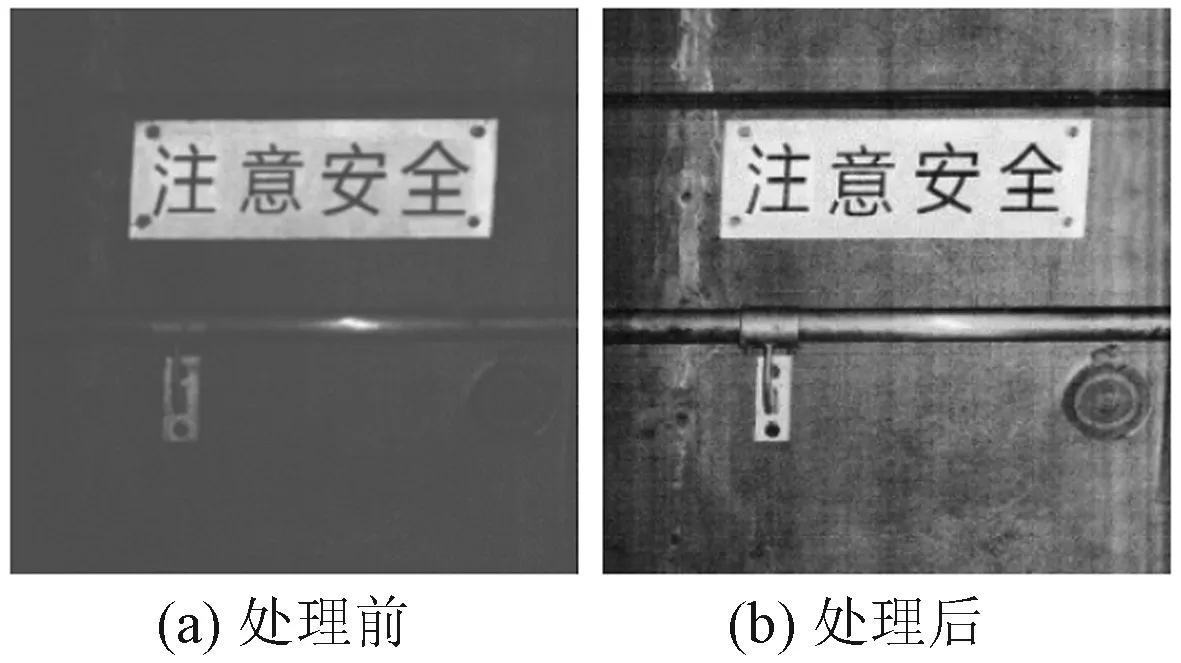
图4 图像处理前后对比
3)图像纠正
线阵相机旋转采集的拱顶图像存在畸变,需要通过仿射变换纠正。图像纠正前后对比见图5。

图5 图像纠正前后对比
4)图像匹配与拼接
对于轨道面图像,采用加速稳健特征(speeded up robust features,SURF)算法[10]对左右两幅进行匹配,修正两幅图像的相对位置。
对于拱顶图像,首先对每张图像进行纠正,然后利用工控机记录相机触发时间,对图像的位置信息进行校核,再根据xml文件记录的角度信息,筛选出每环的图像(相机旋转一圈采集的几张图像合并为一环图像),采用SURF算法进行相邻环图像的匹配。根据匹配结果进行图像拼接,获得完整的隧道展开图。最后,对原始图像进行分级瓦片切分,生成分级瓦片图。隧道拱顶图像拼接效果见图6。
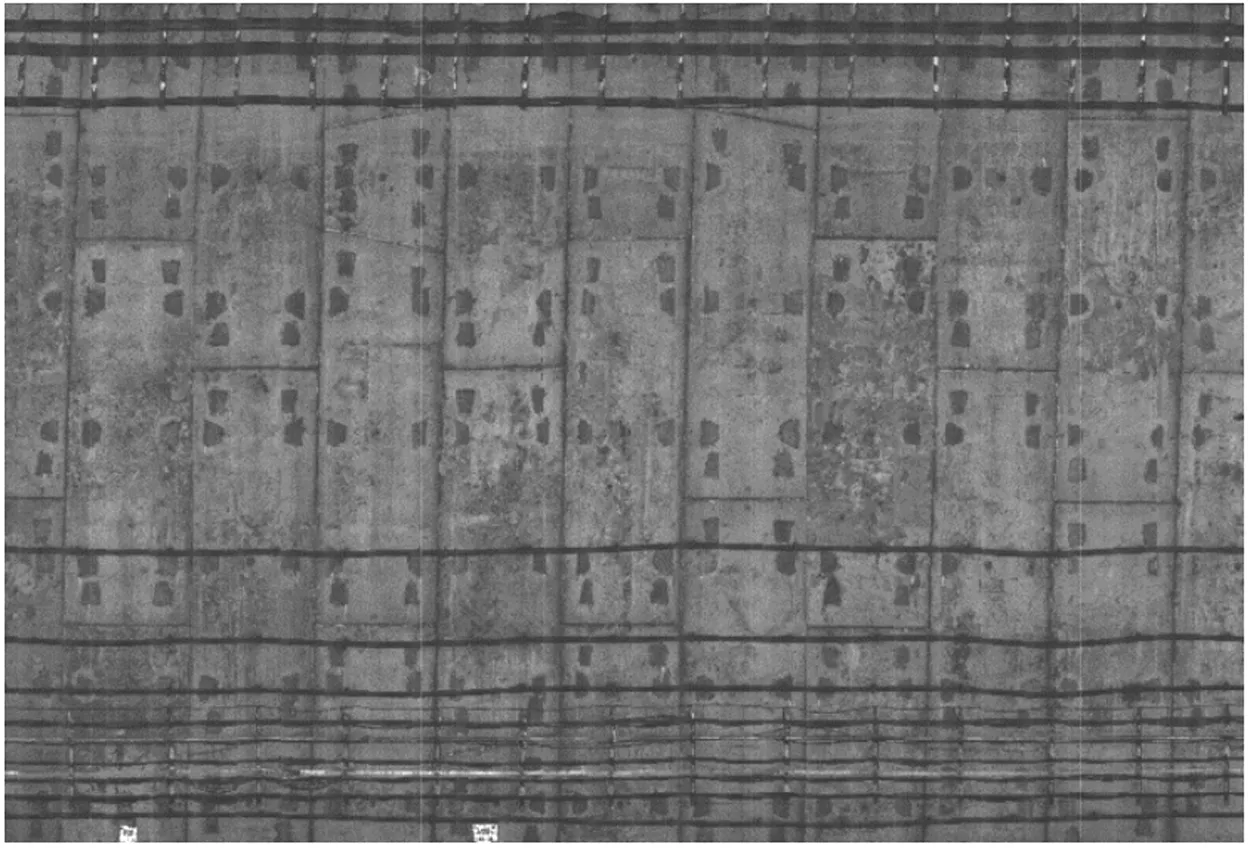
图6 拱顶图像拼接效果
由于特征匹配对数据很敏感,需要对匹配算法进行优化。具体方法是:通过计算H矩阵,采用随机采样一致性(random sample consensus,RANSAC)算法做粗差剔除,结合理论误差剔除误匹配点。通过构造损失函数,以梯度下降的方式优化匹配损失,获得相邻图像的最佳相对位置关系。
4.2.2 病害提取模块
采用加速区域生成卷积神经网络(faster region proposal convolutional neural network,Faster R‐CNN)算法[11]对病害进行自动识别。由于样本数量较少,识别准确率较低。将数据扩充后再进行模型训练,识别准确率仍不能满足工程应用需求,原因是隧道图像的背景太复杂。因此,采用人工辅助的半自动方式进行病害提取,即人工标记病害区域,指定病害类型,再利用训练模型进行自动识别。
5 工程应用
采用地铁隧道表观病害检测系统对国内一地铁200 m盾构区间隧道表观病害进行检测,检测速度2.5 km/h。检测现场如图7所示。

图7 隧道表观病害检测现场
对检测数据进行分析处理,共发现31处结构病害。其中:渗水24处,占比77.42%;混凝土裂纹6处,占比19.35%;混凝土破损1处,占比3.23%。病害图像如图8所示。
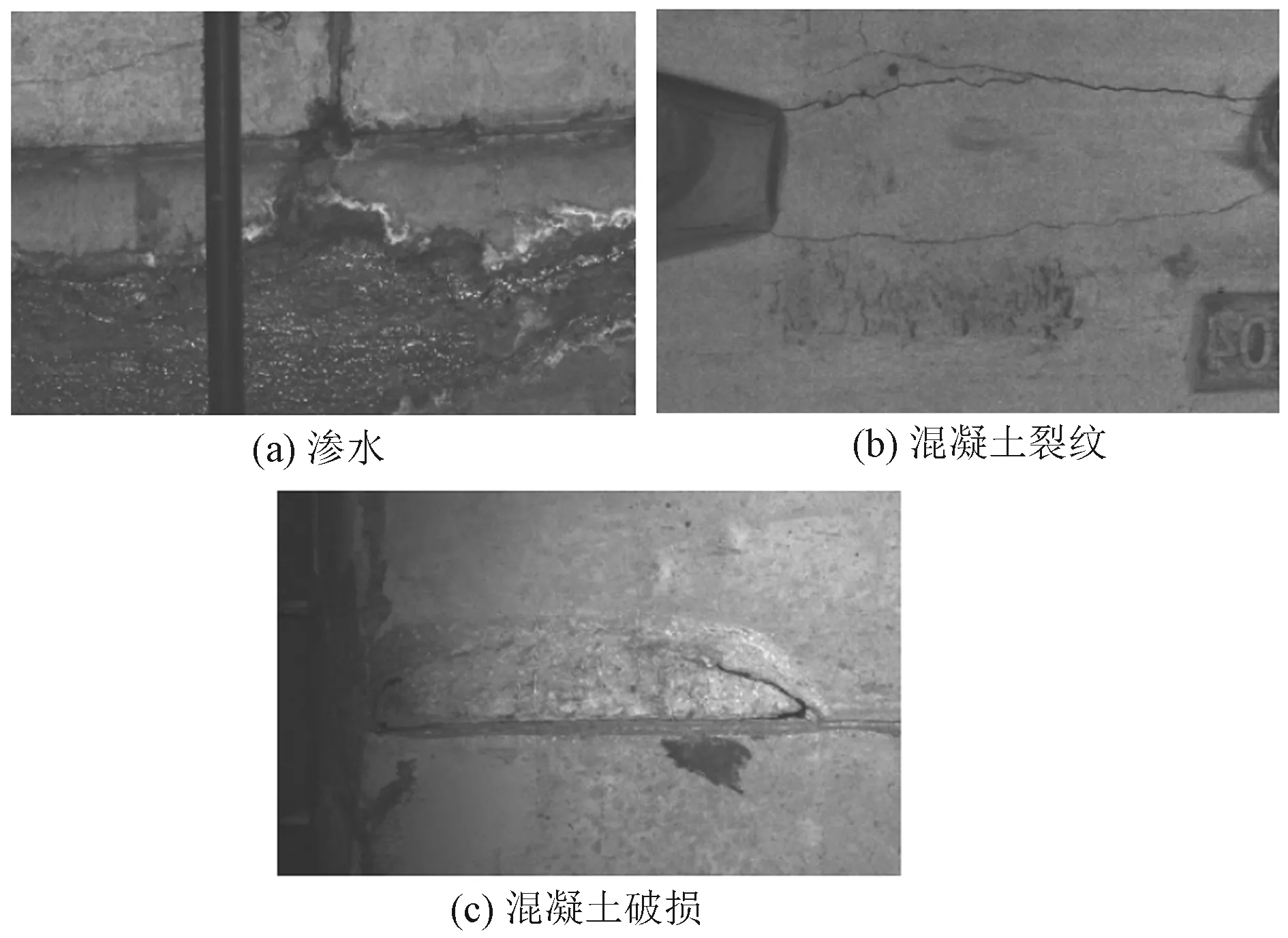
图8 病害图像示例
对该盾构区间隧道病害检测成果进行人工巡检复核,系统检测结果与人工巡检结果基本一致。采用裂纹卡人工比对系统采集的照片和隧道内的实物,得出系统检测精度可达到0.2 mm。与人工巡检相比,系统检测精度与效率更高,还能提供病害的长度、宽度、面积、位置等信息。
6 结语
本文介绍了一种地铁隧道表观病害检测系统。在硬件方面,集成线阵相机和智能运动平台。在软件方面,采用图像处理、图像匹配、图像深度学习等算法研发了相应的数据处理软件。整套系统实现了地铁隧道表面图像的全自动、全覆盖采集,以及全自动的数据预处理和半自动的病害提取。采用单个线阵相机旋转采集隧道壁表观图像,系统质量在60 kg以下,便于检测人员上线作业。
系统软硬件均采用模块化设计,便于后续升级。下一步将持续积累数据,优化算法,提高病害自动识别的准确率。
