重载铁路道岔区钢轨组合廓形及几何参数检测技术
2023-07-30孙陶陶代永波司道林徐玉坡梁宏波胡伟毛庆洲
孙陶陶 代永波 司道林 徐玉坡 梁宏波 胡伟 毛庆洲
1.中国铁道科学研究院集团有限公司 铁道建筑研究所, 北京 100081; 2.中国铁路武汉局集团有限公司, 武汉 430071;3.铁科(北京)轨道装备技术有限公司, 北京 102202; 4.武汉汉宁轨道交通技术有限公司, 武汉 430074
道岔是铁路线路中的薄弱环节,尤其在重载铁路载重量大、运营条件恶劣的工况下,须要重点检查[1-2]。道岔区轨道状态检查包括检测道岔区钢轨形貌、零部件位置关系、轨道几何状态等项目。目前主要应用道尺、钢板尺、钢轨轮廓仪、钢轨磨耗仪[3]等机械测量工具对道岔区轨道状态进行人工检测,功能单一且效率低下。道岔区轨道类型繁多,结构复杂,现有高效轨道检查手段很难广泛应用。以钢轨轮廓检测为例,道岔区钢轨数量多,组合廓形测量区域大,常规的接触式钢轨轮廓仪[4]无法满足道岔区大范围、复杂廓形的检测需求。以区间线路大量使用的轨道检查仪[5]为例,道岔区有害区间影响了轨道检查仪的通过性,在道岔区难以连续测量,而且道岔区工作轨的转换也极大地影响了常规接触式轨道几何测量效果。
综上,道岔区轨道检查工作需求大,任务繁重,但尚未形成能够综合覆盖道岔区段重点检查项点的一体化高效检测手段。因此,亟待研究一种道岔区轨道状态综合检测方法,以提升道岔区工务检查效率,降低工务部门道岔养护维修成本。
1 检测原理
1.1 道岔区轨道状态检测项目
如图1所示,钢轨廓形和几何参数是道岔区轨道状态检查的重点项目。钢轨组合廓形检测技术:采集轨道横断面上多结构体的综合廓形,计算钢轨件磨耗和零部件位置关系。道岔几何参数检测技术:采集轨道三维坐标,将道岔钢轨组合廓形与轨道线形坐标融合,形成轨道三维点云,计算道岔结构几何参数(尖轨降低值、间隙值、导曲线支距、查照间隔/护背距离等)和道岔轨道几何参数(轨距、水平、轨向、高低等)。

图1 道岔区轨道状态检测项
1.2 道岔区钢轨组合廓形检测技术
相比接触式廓形测量方法,非接触式光学测量方法能快速、大范围地获取被测物几何信息,在道岔区钢轨组合廓形检测中具有独特优势。近年来三维光学测量技术发展迅速,三维测量在平面测量的基础上加入了高度信息,具有大视场、高精度和高实时性的优点,在工业检测、逆向设计、生物医药等方面应用广泛[6-8]。因此,选用线结构光三维光学测量技术(简称线结构光技术)研究道岔区钢轨组合廓形检测方法。
线结构光技术能够快速获取断面轮廓,适用于大跨度钢轨廓形测量。线结构光技术的高度测量原理基于三角测量法。如图2(a)所示,激光在物空间基平面M上的O点入射,O点在相机像平面m上的对应点为o。当激光在被测物表面A点反射时,反射光在m上的光斑位置为a点。设A点距M的竖向距离为S,像平面中a点与o点的距离为s,则建立像空间中s与物空间中S的映射关系,在已知像高的情况下可获取物体的高度信息。如图2(b)所示,线激光传感器可同时采集物体较大范围的高度信息,实时性强。利用多个线结构光传感器同步采集的辙叉区钢轨组合廓形如图2(c)所示。
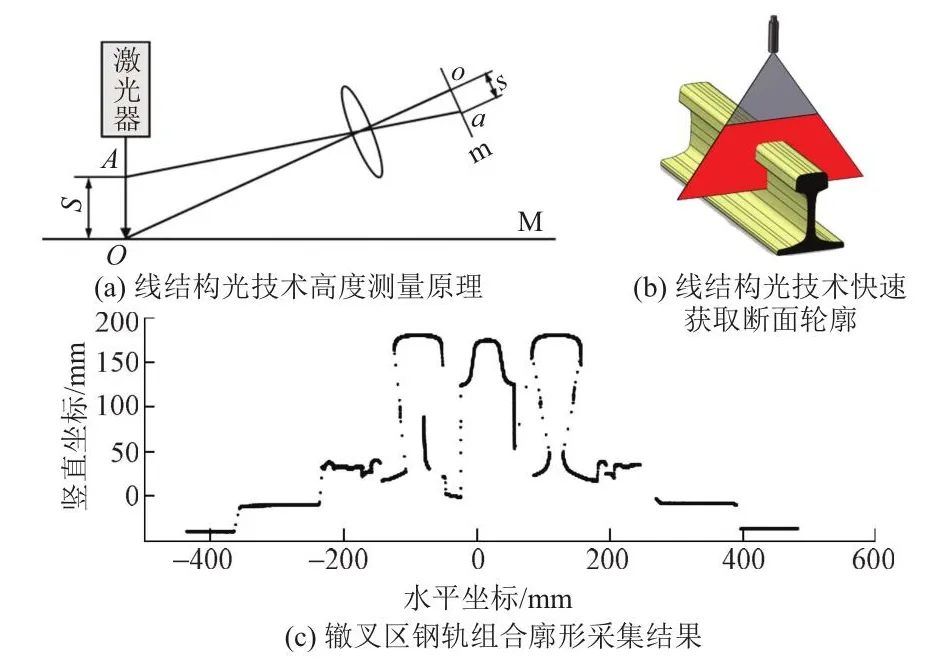
图2 基于线结构光的道岔区钢轨组合廓形检测技术
1.3 道岔区几何参数检测技术
道岔区几何参数检测首先需要建立道岔区轨道的三维信息,由道岔区钢轨组合廓形融合廓形采集截面的位置信息获得。以手推检测机构为载体,以线结构光和惯性测量单元(Inertial Measurement Unit,IMU)[9]为核心传感器,搭载里程测量装置(Distance Measuring Instrument,DMI)和全球卫星导航定位系统(Global Navigation Satellite System,GNSS)的轨道三维测量系统的结构如图3所示。其中,IMU积分计算输出系统相对于初始状态的速度、位置和姿态;DMI作为独立单元,输出测量系统的运动距离和速度;GNSS作为独立观测单元,输出系统的位置和速度。

图3 道岔轨道三维测量系统结构
兼顾高分辨率和长距离精度是轨道三维测量系统的难点。高性能IMU保障了系统具有较高的测量分辨率,为降低IMU长时间积分带来的误差,采用多传感器组合定位方法解算系统的位置姿态数据,即POS(Position and Orientation System)数据。如图4所示,首先对DMI、IMU和GNSS数据做初始化对齐,将IMU数据进行航位推算,得到系统基于惯性测量方法的速度与位置,即INS(Inertial Navigation System)数据;然后利用DMI数据和GNSS数据对IMU数据进行参数增量修正,利用卡尔曼滤波将INS与GNSS数据做差值处理,得到高精度POS数据。根据线结构光与位姿传感器的位置关系,将钢轨组合廓形与POS数据融合,获得具有几何线形的道岔区轨道三维点云。
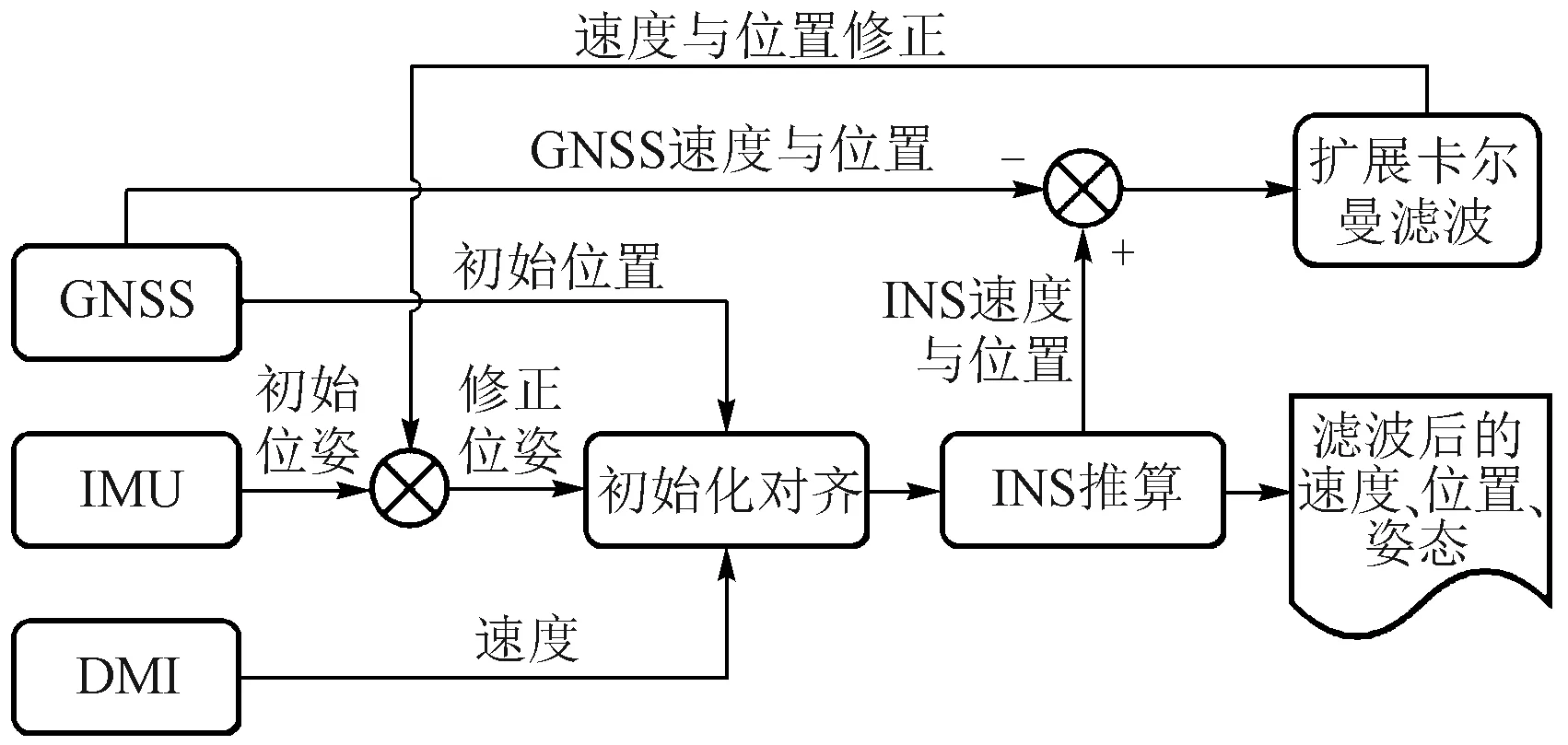
图4 道岔区轨道三维测量技术多传感器组合定位算法流程
对道岔区轨道三维点云进行数据挖掘,可以获得具有结构意义的道岔区几何参数。以结构参数中的尖轨降低值和轨道几何参数中的轨道高低的检测为例,道岔几何参数的解算过程如图5所示。检测尖轨降低值时,利用图像识别方法找到尖轨所在区域,提取区域内钢轨组合廓形,根据结构特征计算尖轨与基本轨顶面高差,即尖轨降低值。检测轨道高低时,从轨道三维点云中提取工作轨轨顶三维曲线,滑动截取设定弦长下的空间曲线,依次计算弦线中点矢距,即轨道高低。
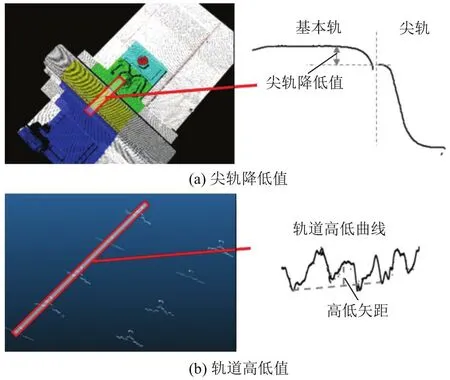
图5 道岔几何参数解算方法
2 道岔区轨道状态综合检测样机
为验证道岔区钢轨组合廓形及几何参数检测技术的可行性,研制了道岔区轨道状态综合检测样机。样机以手推小车为载体,搭载轨道三维测量系统、嵌入式计算机等模块,见图6。其中,线结构光传感器作为廓形采集传感器,采集道岔尖轨、心轨、基本轨、翼轨等部件的组合廓形数据;DMI、IMU和GNSS作为位置与姿态传感器组合,分别采集小车的行驶里程、瞬时速度、姿态和位置;嵌入式计算机作为数据处理单元,对传感器数据进行处理和解算,输出道岔区轨道状态综合检测结果。系统采用同步控制技术,同步触发多源异构传感器,将数据统一到同一时间基准中。
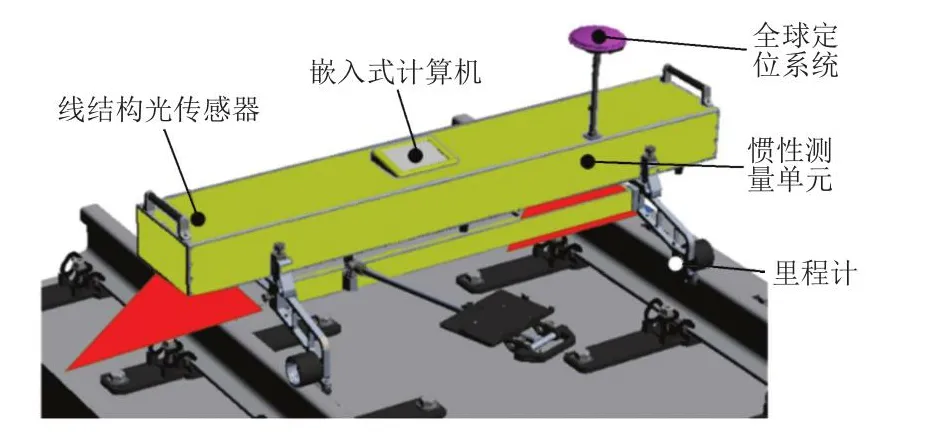
图6 道岔区轨道状态综合检测样机结构
3 样机性能试验
3.1 廓形检测
应用道岔区轨道状态综合检测样机对道岔区钢轨廓形检测效果进行验证。由于行业内缺乏成熟的道岔区钢轨组合廓形测量仪器,选取50 kg/m基本轨开展验证试验,将样机检测结果与成熟产品MiniProf钢轨轮廓仪的检测结果进行对比,见图7。可知:光学系统在轨顶面的数据间隔小于轨侧面的间隔;本文系统与MiniProf测量得到的竖直、水平方向偏差分别控制在±0.2 mm和±0.1 mm,测量结果具有较高可信度。
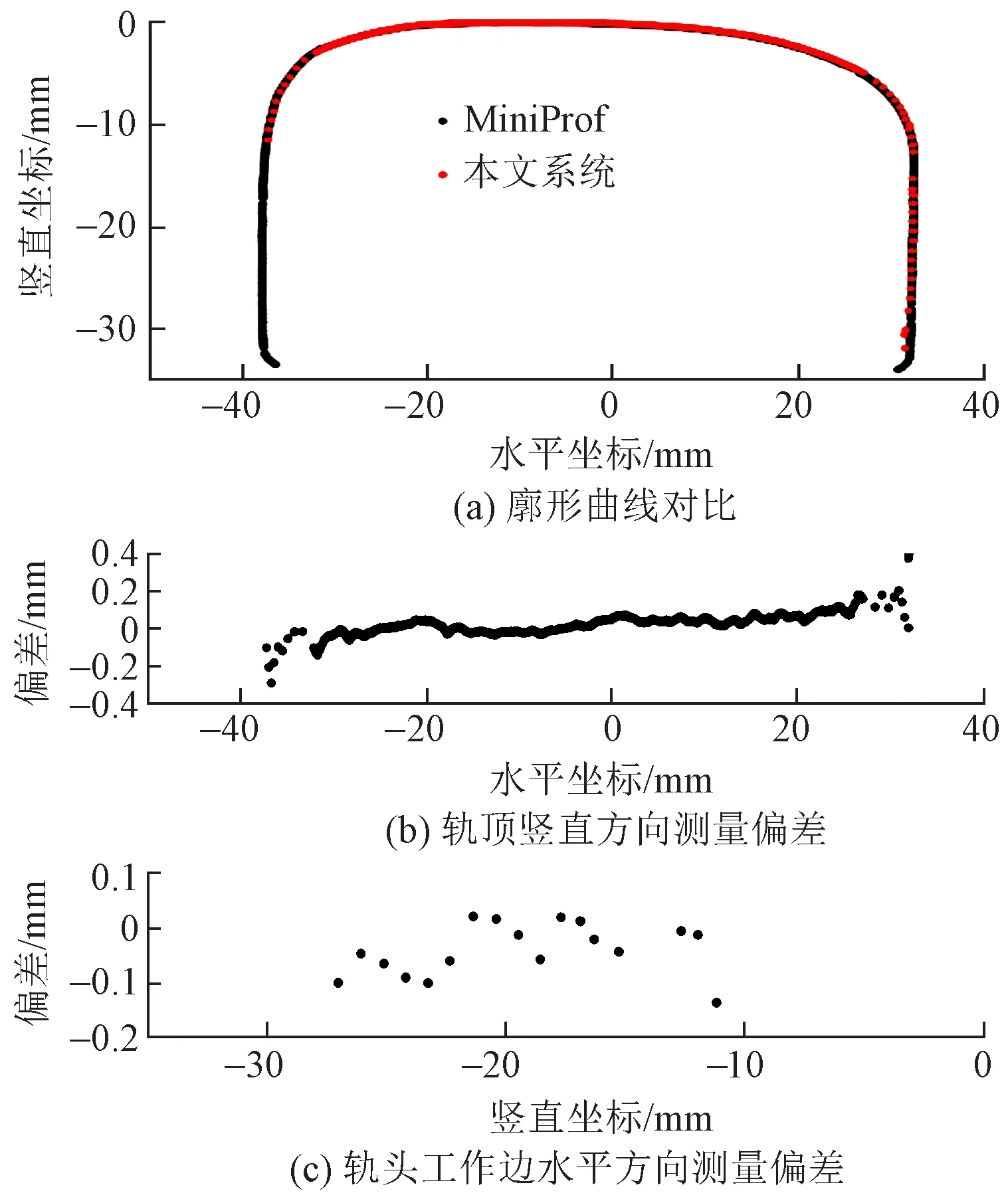
图7 钢轨廓形测量效果
3.2 几何参数检测
在铁科(北京)轨道装备技术有限公司的试验道岔上,对道岔区轨道状态综合检测样机开展了几何参数检测性能试验。道岔类型为50 kg/m钢轨9号单开道岔;小车样机由单人推行,推行速度约3 km/h,推行距离约50 m。样机采集的道岔区轨道三维点云见图8。可知:采集区域内钢轨、扣件、道砟和轨缝清晰可见,系统具备高分辨建立道岔区轨道复杂三维模型的良好采集性能。
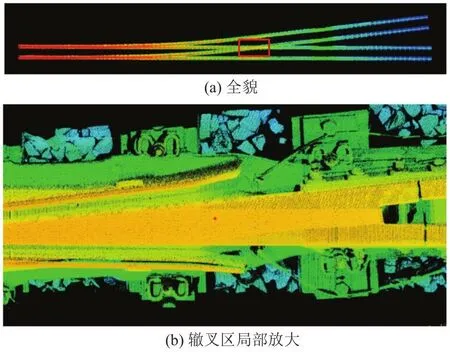
图8 道岔区轨道三维点云图
1)结构几何参数
利用道岔区轨道状态综合检测样机测得道岔区结构几何参数,并与人工测量(使用钢板尺、卷尺、道尺等工具)的结果进行对比,见表1。可知:除查照间隔外,样机与人工测量结果的偏差基本控制在±1 mm内,该样机具有替代人工检测手段的可行性;护轨轮缘槽宽度、查照间隔和护背距离的样机与人工测量结果偏差较大,考虑这三项检测对象中均包含护轨,认为偏差是由护轨工作边采集点稀疏造成的。
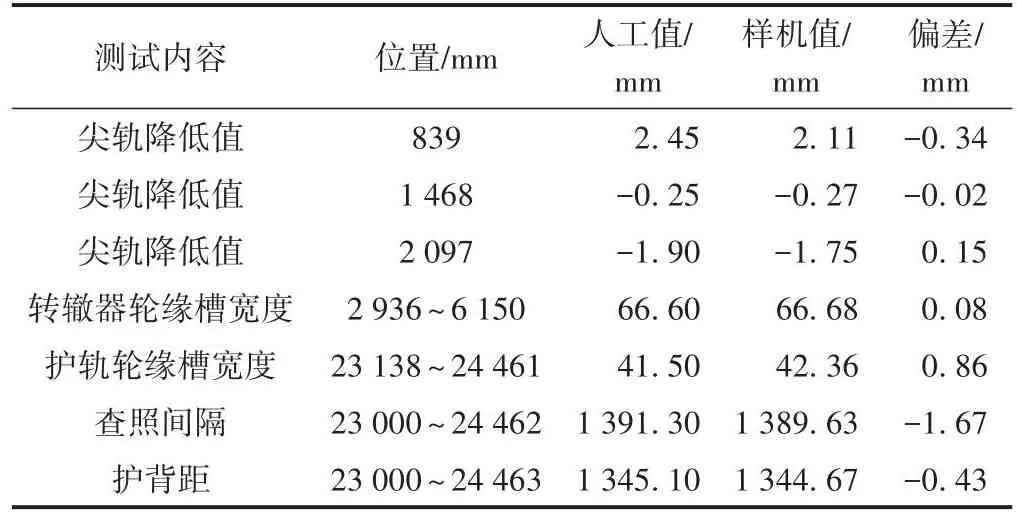
表1 道岔结构几何参数检测结果对比
2)轨道几何参数
利用道岔区轨道状态综合检测样机测得道岔区轨道几何参数,并与人工弦线法测量结果进行对比,结果见图9。其中,检测弦长选取TG/GW 102—2019《普速铁路线路修理规则》[10]规定的轨道静态几何不平顺评价弦长(10 m弦)。以轨向检测为例,将轨道曲线以10 m弦长划分,分别以1 m间隔计算每段轨道的10 m弦矢距。由图9可知:样机解算结果与人工弦线法测量结果趋势一致,可替代人工检测。
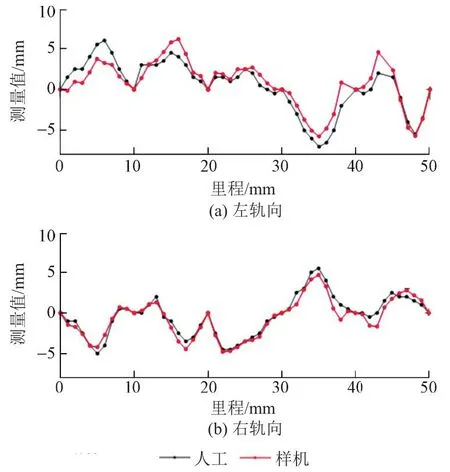
图9 轨向检测中样机与人工弦线法测量结果对比
人工弦线测量方法受弦线张紧程度与人工操作影响,具有较大误差。为进一步验证样机对轨道几何参数的检测精度,将检测结果与轨道检查仪的测量结果进行对比,见图10。由于轨道检查仪在道岔区适应性不佳,该试验在区间线路开展,共采集100 m长轨道信息,以0.5 m间隔滑动计算每10 m弦轨道正矢。由图10可知:样机解算结果与轨道检查仪测量结果趋势一致,偏差基本控制在±2 mm内,能够可靠反映轨道几何不平顺规律。进一步分析偏差数据,偏差数值在零值两侧对称分布,幅值随测量里程增加呈发散趋势,后续应提升惯性测量单元的长时稳定性,进一步提高检测精度。
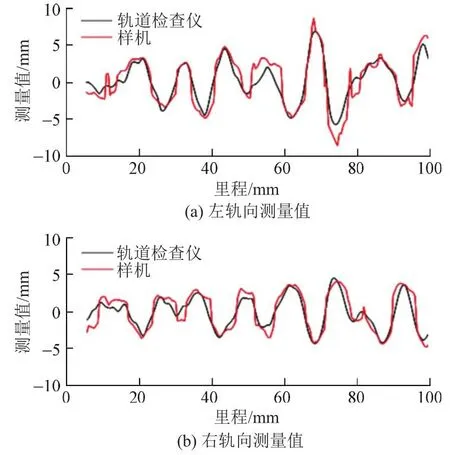

图10 轨向检测中样机与轨道检查仪测量结果对比
3.3 检测效率
道岔轨道状态综合检测系统操作的主要耗时项分别为设备组装时间(约5 min)、系统初始化时间(约5 min)、推行采集时间(约2 min,以步行速度3 km/h、推行单股100 m长的道岔计算)和数据后处理时间(约5 min),用时总计约17 min。
目前工务部门实施道岔状态综合检测时,一般是逐个开展单项检查。以道尺操作为例,人工检测每个检测点需10 s。以1 m间隔采集,单股百米长道岔的单项数据采集用时为17 min。
可见,道岔轨道状态综合检测系统的检测效率远高于人工检测。
4 结语
为解决重载道岔区轨道状态检测人力成本高、缺乏高效检测手段的问题,本文针对钢轨廓形和几何参数两个道岔区段重点检查项点,研究了道岔区轨道状态综合检测技术。根据道岔区钢轨廓形具有结构复杂和测量范围大的特点,选用基于多个线结构光传感器的技术方案,通过建立多传感器高精度光学映射关系,实现了快速、大范围的道岔区钢轨廓形测量。研究了以惯性测量单元为核心的轨道三维测量技术,通过设计多传感器组合定位方法,能够高分辨地建立道岔区轨道三维点云。在三维点云的基础上,研究了几何参数自动化解算算法,具有综合性强和自动化程度高的优点。
对所提出的检测方法开展了样机研制与性能试验,分别与人工检测方法和仪器检测方法的检测结果进行了对比。结果表明,所提出的道岔轨道状态综合检测方法原理可行,各项检测结果与现有方法一致且精度较高,检测用时显著低于人工方法。
本文研究成果有望取代人工测量手段,极大提升道岔区检测效率,具有良好的应用前景。后期需进一步开展测量精度研究,减小测量误差,形成稳定可用的道岔区轨道状态综合检测产品。
