基于FIO-COM 的海洋声学预报系统的构建与应用
2023-07-29杨春梅刘宗伟吕连港
杨春梅,刘宗伟,姜 莹,吕连港*,肖 斌
(1. 自然资源部 第一海洋研究所,山东 青岛 266061;2. 自然资源部 海洋环境科学与数值模拟重点实验室,山东 青岛 266061;3. 山东省海洋环境科学与数值模拟重点实验室,山东 青岛 266061;4. 崂山实验室 区域海洋动力学与数值模拟功能实验室,山东 青岛 266237)
近几十年来,各国对水声设备、水声理论、海洋环境等方面的研究提出了更高的要求。声呐技术取得跨越式发展的重要途径在于深入挖掘海洋环境水声特性。因此,研究海洋声速场及声场的分布、了解声速剖面及声传播的时空分布变化规律、掌握声道的分类特征,以及探索深浅海声道特征量的地理分布状况等,对提高反潜、探测能力和建立深海预警体系有着非常重要的意义。
海洋声学的研究范畴主要集中在:①探索以海面波浪、海水非均匀性,以及海底结构为代表的海洋环境在时空变化方面对声场作用的规律;②研究声波在海洋探测和反演等方面的应用,即如何利用声波来探测海洋结构及海洋中物体的位置与特性[1]。在以往进行的海洋环境对声场影响研究中[2-4],大多对海洋环境进行相对简单的假设,这必定会对分析结果造成一定偏差。
随着时代与科学的进步,很多优秀成熟的海洋模式被开发,其研究预报对象也能分辨中小尺度海洋运动,可以与声场理论结合进行研究。近20 a 来国外在这方面得到了极大的发展[5-10]①BOTSEAS G, LEE D, SIEGMANN W L. IFD: interfaced with Harvard open ocean model forecasts. United States: Naval Underwater Systems Center Technical Report 8367, 1989.。Botseas 等①将隐式-有限差分PE 模型与HOOM 模型产生的海洋预报联系起来,实验结果成功地证明了这种耦合方式的有效性。Mellberg 等[11]于1990 年提出使用海洋描述预报系统(the Oceanic Descriptive Predictive System,ODPS)与有限差分模型耦合建立中尺度涡条件下的声场参数,对湾流区域冷、暖涡旋影响下的声传播特点以及产生的声传播时间的影响进行了深入的分析与总结。2016年 Heaney 和Campbell[12]使用海洋预报数据库ECCO2(Estimating the Circulation and Climate of the Ocean,Phase II )结合全三维抛物模型系统研究了海洋中尺度现象对全球尺度上的低频声传播影响,发现中尺度现象能导致1.8°的水平偏转,这可能对远距离低频声源的定位产生重大影响。国内在声学和海洋学的耦合研究方面也有了一定发展。笪良龙等[13]利用海洋-声学耦合模式预报声速场时空变化,获取声速垂直结构不确定性分布规律,提出了经验正交函数-随机多项式展开方法以降低不确定参数维度,得到声场不确定性分布。肖瑶[14]利用遥感数据与全球再分析数据,结合涡旋探测和追踪方法分析我国南海北部和墨西哥湾中尺度涡旋的参数特征和分布情况,基于简正波和射线理论对中尺度涡引起声场时空变化机理进行了解释。
自然资源部第一海洋研究所基于多年的积累,开发了全球0.1°分辨率海浪-潮流-环流耦合模式(Wave-Tide-Circulation Coupled Ocean Model by the First Institute of Oceanography,FIO-COM)。本文在该模式的基础上,构建了一种新型的适用于高性能计算机的全球海洋声学预报系统,该系统集合了一种水声环境特征诊断方法和几种声传播模型,使其具有海洋环境水声特征诊断和海洋声场相关预报功能;并将该系统应用于全球海域,分析了全球海域的水声环境和声呐作用距离的空间特征及季节变化。
1 海洋声学预报系统的构建和功能
基于自然资源部第一海洋研究所自主研发的全球0.1°分辨率海浪-潮流-环流耦合模式(FIOCOM),本文提出了一种水声环境特征诊断方法,将其与海洋动力模式、水下声传播模型协同运作,构建了一种适用于全球海域的水下声学预报系统 (Global Ocean Acoustic Forecasting System,FIOGOAFS),该系统能够针对全球海域的水声环境进行声道特征诊断,并提供水下声场及相关结果预报。水声环境声道特征诊断结果包括表面声道深度 (Sonic Layer Depth,SLD) 及表面声道截止频率(Surface Duct Cutoff Frequency,SFD)、半声道条件 (Half Channel Conditions,HAF)、深海声道轴深度(Deep Sound Channel Axis Depth,DSC) 和浅海声道轴深度 (Shallow Sound Channel Axis Depth,SSX);水下声场及相关预报结果包括:传播损失断面分布、传播损失水平分布、汇聚区距离和声呐作用距离等。海洋声学预报系统功能模块的基本结构见图1。
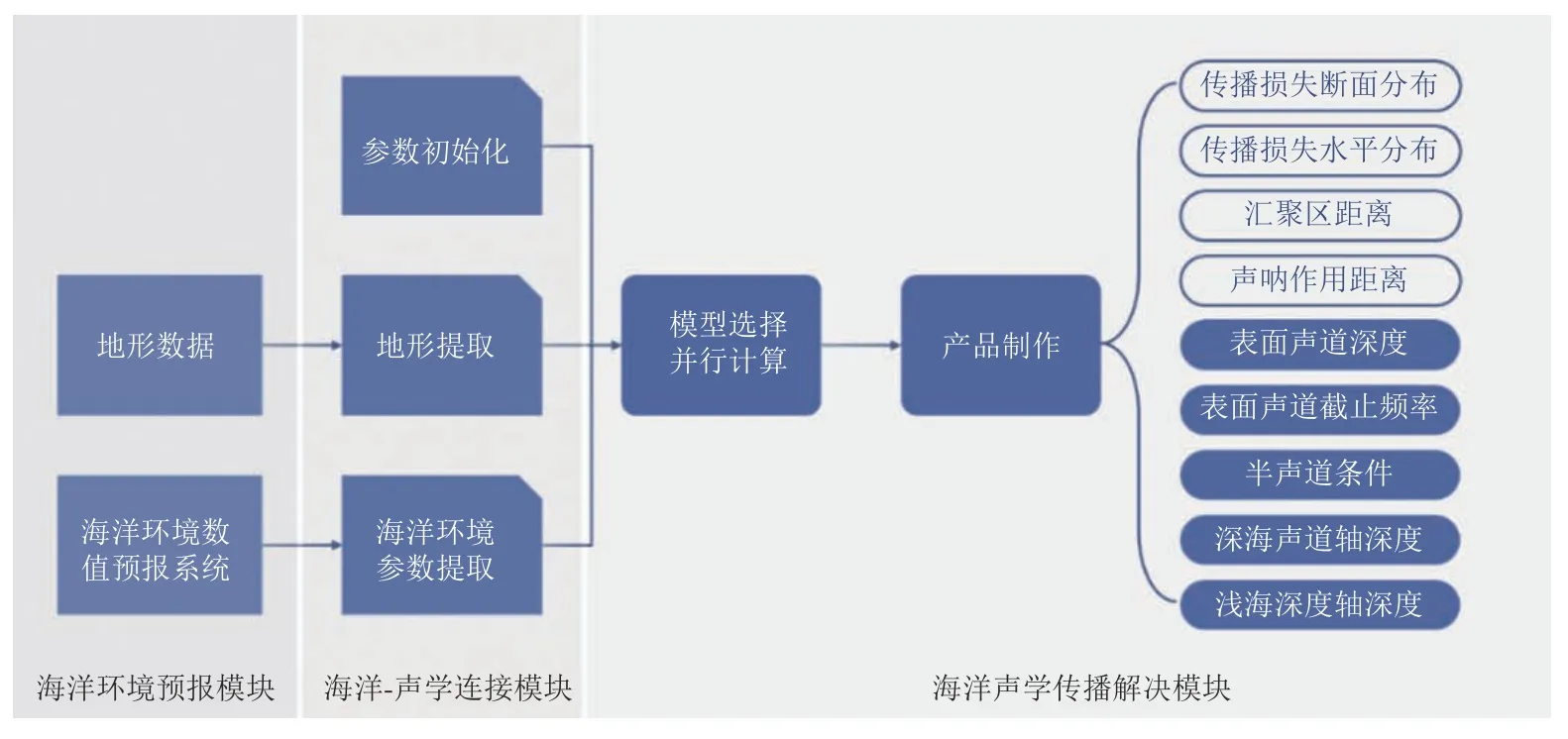
图1 海洋声学预报系统的功能模块图Fig. 1 Diagram of the functional modules of the Ocean Acoustic Forecasting System
本系统海底地形水深文件数据采用通用大洋水深制图(The General Bathymetric Chart of the Oceans,GEBCO)提供的30″分辨率全球大洋水深网格数据,该数据基于多波束数据插值而成,其中包含了源标识数据(Source ID-entified code,SID),用来标识真实原始声呐点水深数据和插值数据。海底底质参数一部分利用自然资源部第一海洋研究所自主调查的海底环境参数资料,一部分采用反演获得的底质参数数据。海洋环境数值预报系统使用自然资源部第一海洋研究所自主研发的全球0.1°分辨率海浪-潮流-环流耦合数值预报系统(FIO-COM),该预报系统能够提供未来7 d 全球海浪波高、波向、海表面高度、谱峰周期、海流流向和流速、海水温度、盐度、密度、水位和海冰密集度等海洋环境要素的预报产品,预报结果每隔3 h 输出1 次,其中海浪波高、温度、盐度、密度以及海冰密集度等均可转化为特定格式的海洋环境参数输入到声学模型中。海洋-声学连接模块通过将海洋模型的温度、盐度、密度、海浪波高等输出转化为声学模型的参数输入,将海洋模型和声学模型结合在一起。海洋声学传播解决模块集合了一种海洋环境水声特征诊断方法以及几种声传播模型,可用于诊断预测海洋环境水声特性以及声学的相关结果预报。本系统在高性能计算机上并行实现,在进行声场计算时,针对频点和方位角按进程个数进行均衡分配;在进行水声环境特征诊断及声呐作用距离预报时,将地理空间区域按进程个数均衡划分。本文针对全球海洋区域实现了水声环境特征诊断及声呐作用距离预报,并对预报结果进行了分析。
2 水声环境特征诊断及预报结果分析
海洋中声速剖面的某些特定的垂直结构,能够限制声能量在一定深度范围内很少向外泄漏,声能量在该深度范围内远距离传播的这个水层结构称为声道。除高纬度、赤道等特殊区域外,典型深海声速剖面可分为三层结构:表面等温层、温跃层和深海等温层。极地区域深海一般不存在温跃层,声速从海面到海底呈现正梯度分布。水声学的浅海深度一般为几十米到数百米,其间没有固定的深海声道。海洋这些特定的分层现象及其产生的不同声传播模式与声呐的工作原理密切相关。
水声环境特征诊断主要针对水体中的声速剖面进行。海洋模型提供全球海域的温度、盐度及对应的深度等环境参数预报,根据这些海洋环境参数求取对应网格点的声速剖面,本系统中声速剖面利用Mackenzie 公式求解:
式中: t 为温度(℃); S 为盐度; D为深度(m)。本系统采用垂直梯度法对声速剖面进行特征诊断。水声特征诊断流程图如图2 所示。本系统利用声速垂直梯度确认声速剖面所有极小值点和极大值点的深度(图3)。从海面开始,若初始梯度为负时,则判定该网格点不存在表面声道;若初始梯度为正时,查找确认自海面起第1 个声速极大值点的深度,判定该深度为表面声道深度(SLD),计算表面声道截止频率(SFD);若正梯度从海面一直延伸到海底,则确认该网格点满足半声道条件(HAF)。针对声速垂直梯度法确认的声速剖面极小值点深度(从负梯度转正梯度过零点的深度),查找确认声道轴深度。本系统以350 m 深度作为浅海声道轴深度(SSX)和深海声道轴深度(DSC)分界线。

图2 水声环境特征诊断流程图Fig. 2 Flow chart of the diagnosis of underwater acoustic environment characteristic
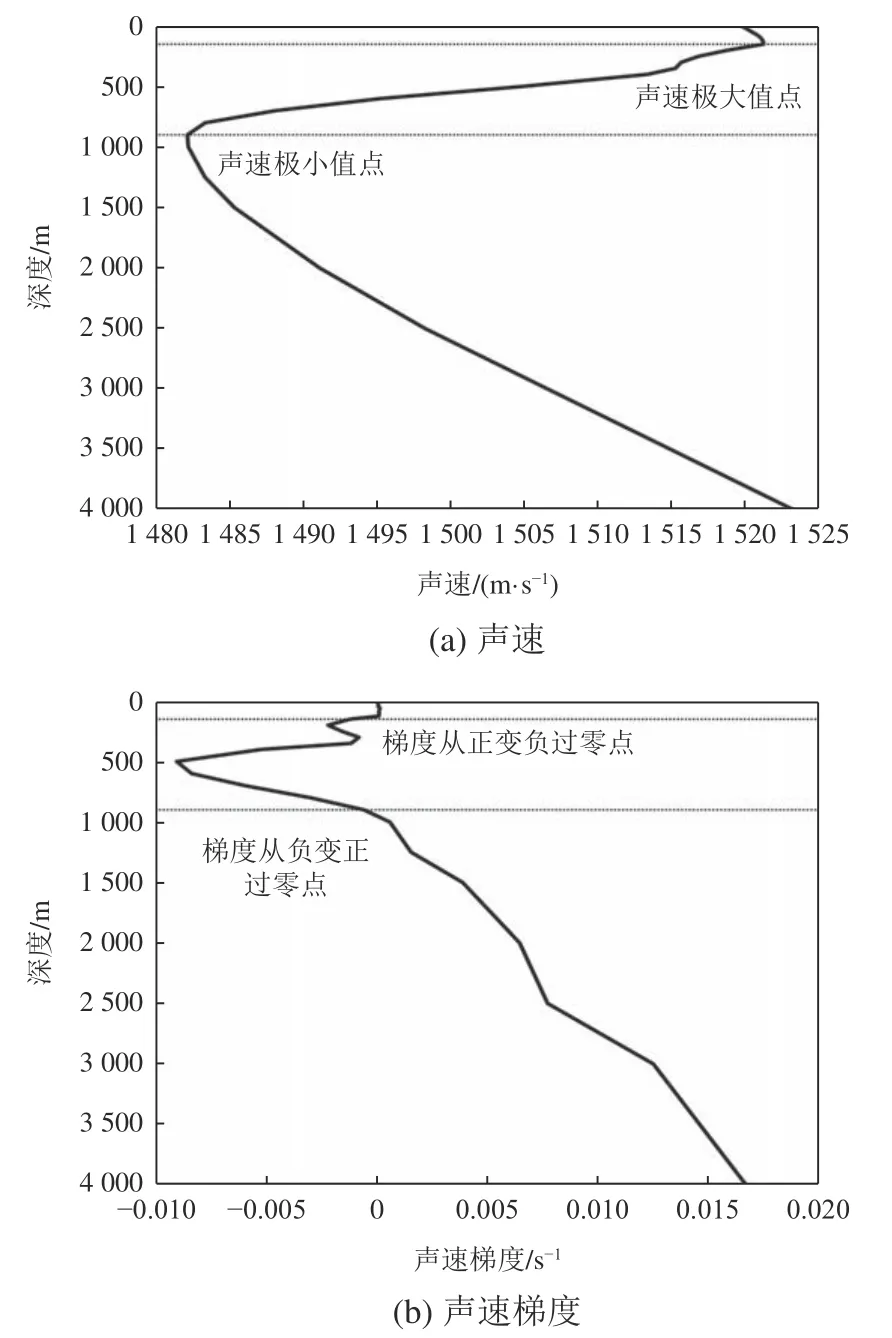
图3 声速及声速梯度Fig. 3 Sound velocity and its corresponding gradient
2.1 表面声道及表面声道截止频率
海-气热通量变化过程和风浪搅拌作用使海洋近表层产生一定厚度的等温层。层内温度均匀,压力随深度增加,声速呈正梯度分布。近表层声源发出的声线在该层中传播时几乎被完全限制在表面层中传播,该层被称为表面声道。表面声道是海洋近表层较有效的声信道,能够实现声能的远距离传播。声能在表面声道中传播存在低频截止现象,只有高于某频率的声能才能传播。表面声道的截止频率(f0)为
式中: cs为 海面处的声速; a为 相对声速梯度; H为表面声道深度。
表面声道深度和截止频率是表面声道的重要参数。表面声道越深,捕获的声能越强,声传播距离越远。本文构建的海洋声学预报系统(FIO-GOAFS)能够给出全球海域的表面声道深度和表面声道截止频率。本系统中,表面声道深度定义为近表层声速极大值所在的深度 H;之后,由声速数据计算层中的相对声速梯度a, 并根据式(2)进一步计算截止频率 f0。接下来利用系统给出了2 月和8 月的预报结果(图4 和图5)。图4 给出了全球海域的表面声道深度(2 月和8 月),水平网格为0.1°×0.1°。从预报结果可以看出,低纬度海域常年表面声道很弱,厚度约几十米,赤道附近基本不存在表面声道。中、高纬度海域在夏季表面声道很弱,即使存在, 表面声道深度也只有几十米。在冬季,混合层厚度加深,低纬度海域表面声道厚度可达150~200 m;中纬度海域表面声道深度可伸展至大洋主温跃层;高纬度大部分海域存在表面声道,表面声道深度在100 ~300 m。表面声道截止频率与表面声道深度 H3/2成反比,表面声道深度越浅,截止频率越高;表面声道深度越深,截止频率越低。冬季的中、高纬度海域表面声道截止频率很低,约几十赫兹,夏季海域几十米表面声道厚度的表面声道截止频率在600~1 000 Hz(图5)。由于表面声道位于海洋表层,受到太阳辐射和风雨搅拌作用,因此,表面声道深度和截止频率具有明显的空间分布特征和季节性变化。

图4 全球海域表面声道深度预报结果Fig. 4 Forecasting results of the sonic layer depth in the global ocean

图5 全球海域表面声道截止频率预报结果Fig. 5 Forecasting results of the surface duct cutoff frequency in the global ocean
2.2 半声道条件
如果声速正梯度从海面一直延伸到海底,则称为半声道。声速随深度加深逐渐增大,最大声速位于海底。近表层声源发出的声线在传播过程中不断向上折射,在海面向下反射,然后再次向上折射,循环往复,向前传播。半声道效果相当于加强版的表面声道,声能量在半声道条件下能传播更远的距离。图6 为FIO-GOAFS 系统给出的全球海域2 月和8 月的半声道分布状况,由图6 可见,半声道主要分布于冬季的极地区域以及部分浅海区域。
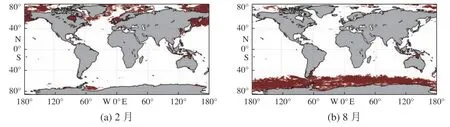
图6 全球海域半声道分布预报结果Fig. 6 Forecasting results of half channel conditions in the global ocean
2.3 声道轴
声速极小值所在的深度称声道轴。声道轴分为深海声道轴和浅海声道轴两类:深海声道轴是深海的一个稳定的特征,位于主跃层之下;浅海声道轴发生在主跃层,通常跟锋面和涡旋有关。
2.3.1 深海声道轴
深海声道轴位于主跃层之下的最小声速深度。声源位于深海声道轴附近时,其在一定角度范围内出射的声线被限制于深海声道内传播。这部分声线不受海面散射和海底反射的影响,能够传播很远的距离。深海声道又被称为SOFAR(Sound Fixing and Ranging Channel, SOFAR)声道,利用深海声道可以有效地定位和测距。图7 为预报系统给出的2 月和8 月的深海声道轴深度预报结果。由图7可见,2 月和8 月的深海声道轴深度基本一致,说明深海声道轴受季节变化的影响较小,深海声道效应比较稳定,但是深海声道轴深度具有明显的空间分布特征。在纬向上,赤道海域主温跃层强而薄,深度约300 m,因而赤道海域深海声道轴深度较浅,大约在800 m;副热带海域主温跃层深度加深,厚度加大,深海声道轴变深,在1 000~1 200 m;高纬度海域主温跃层强度增大,厚度减小,水层变浅,声道轴深度在350~500 m;极地海域不出现深海声道轴。声道轴深度的分布随纬度的变化大体呈“W”形状分布。但是在一些高温、高盐附近的特殊海域,声道轴深度的分布不符合这个规律。例如,在北大西洋东部,由于高温高盐的地中海水溢出直布罗陀海峡下沉,该海域在1 200 m的水层上出现了大片高温区;同样,在印度洋北部,由于红海和波斯湾的高温、高盐水下沉,使得印度洋北部1 000 m 水层出现相应的高温区。1 000 m 水层高温区的出现使得北大西洋东部和印度洋北部原有的深海声道变得不明显,声速梯度变得缓和,最小声速值深度出现在1 500~2 000 m。
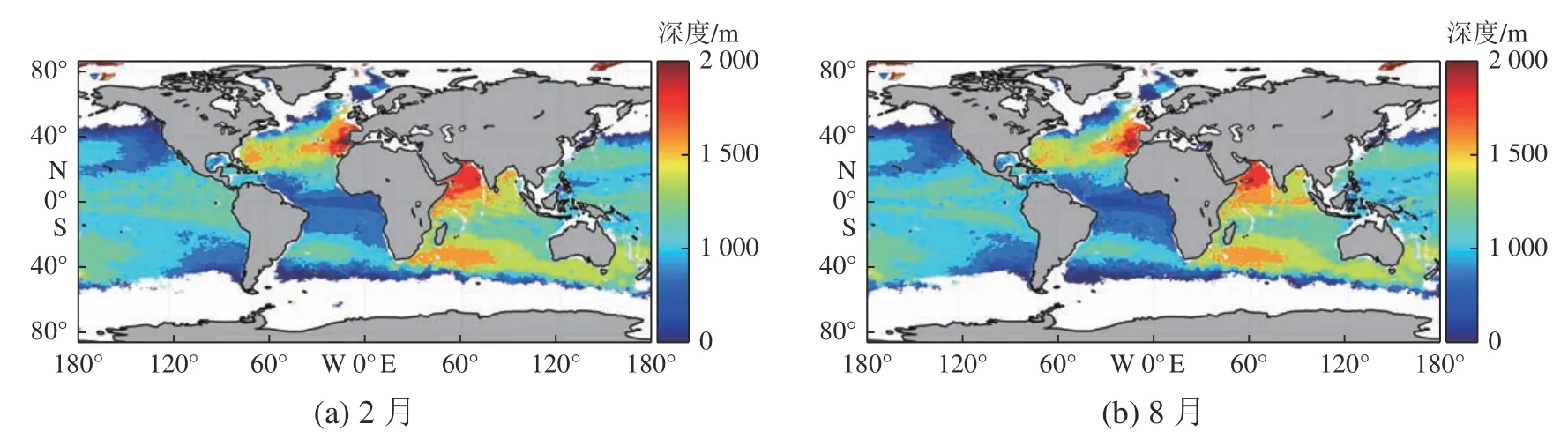
图7 全球海域深海声道轴深度预报结果Fig. 7 Forecasting results of the depth of the deep sound channel axis in the global ocean
2.3.2 浅海声道轴
浅海声道轴出现在混合层下界,主温跃层的上层区域,通常与锋面和涡旋有关。地中海和红海声道轴深度常年位于350 m 以浅,本系统定义其为浅海声道轴,2 个海域不存在深海声道轴。图8为预报系统给出的2 月和8 月的浅海声道轴深度预报结果。由图8 可见,2 月和8 月,日本海、阿拉斯加湾的浅海声道轴也一直存在,位于200~300 m。日本海从200~300 m 深度延伸至海底,声速线性增大,声速最小值出现在200~300 m。8 月,浅海声道轴出现在温带太平洋海域,声道轴深度位于100~300 m。某些海域常年存在2 个声道轴。例如,直布罗陀海峡以西的北大西洋海域,2 月和8 月均存在2 个声道轴:浅海声道轴深度约300 m,深海声道轴深度约1 800 m,此声速分布的形成是由于地中海高盐暖水团入侵至大西洋1 200 m 深水层的缘故。印度洋40°S 部分海域存在双声道轴,浅海声道轴深度位于120~130 m,深海声道轴深度位于1 362 m 左右。
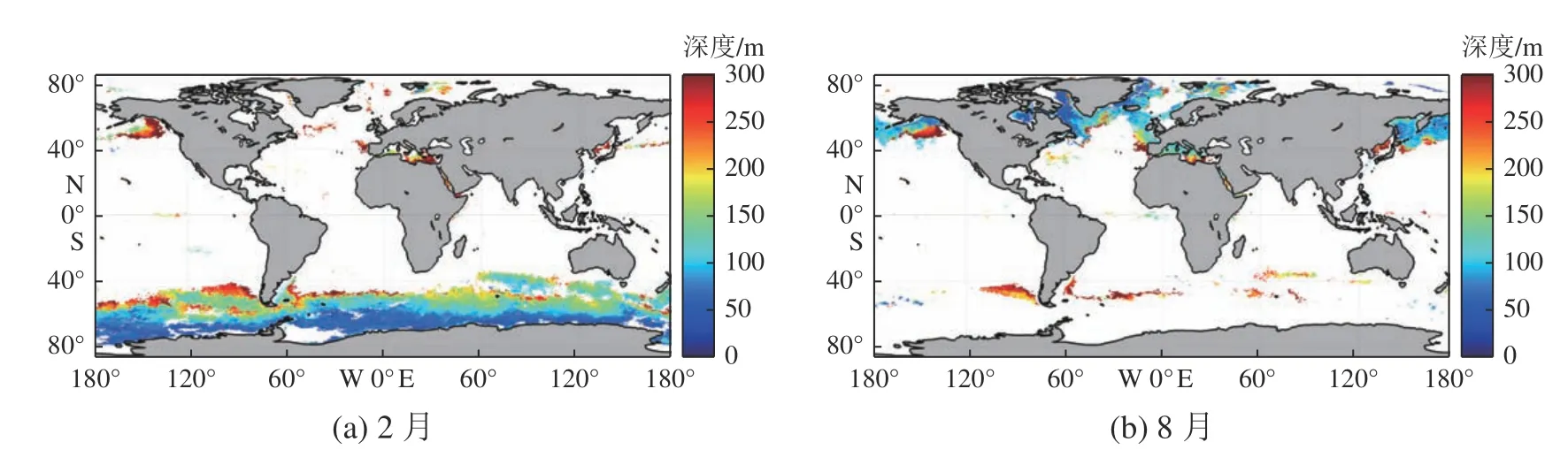
图8 全球海域浅海声道轴深度预报结果Fig. 8 Forecasting results of the depth of the shallow sound channel axis in the global ocean
3 声场及相关预报结果
海洋声学预报系统除具有上述水声环境特征诊断功能,还能提供声场及相关结果预报。本系统结合了几种模型用于声场计算;之后,在声场计算的基础上,设定声呐优质因数,对声场结果进一步处理,使得系统具备了声呐作用距离预报的功能。该系统最终可以提供3 种形式的计算结果:①距离-深度垂直断面的声场分布;②距离-方位角水平平面的声场分布;③全球或区域任意深度的声呐作用距离估计结果。
相较于垂直剖面和水平剖面的声场预报,全球或区域的声呐作用距离预报的计算量较为庞大,计算过程中使用高性能计算机以提高计算效率。在本节中介绍针对全球海域的声呐作用距离预报。本次预报中设置声呐作用距离水平分辨率为1°。将海域中的计算任务按照海域面积均衡分配给每个进程,并且每个进程读取自己计算范围内的地形、温度、盐度、海面粗糙度等参数。计算前判定声源位置是否位于海洋区域,声源位于陆地直接跳过。对于单个网格点对应的声呐作用距离的求解:首先,假定目标声源在网格点的存在;其次,围绕目标声源计算各个方位角不同深度的水平距离传播损失,将计算结果与声呐优质因数进行比较;最后,对所有方位角的作用距离进行求和平均,得到该网格点的声呐作用距离。
声呐系统的作用距离与工作频率息息相关。如果选定声呐优质因数,单从传播损失来考虑,相同海洋环境下,声信号频率越高,传播过程中衰减越大,传播损失也就越大。本文中的计算,只针对中心频率100 Hz、1/3 倍频程带宽的目标声源;计算时设定声呐优质因数为80 dB,对于被动声呐来说,该优质因数规定了最大允许传播损失。图9 为本系统给出的2021 年8 月5 日全球海域的声呐作用距离预报图。由图9a 可见,当声呐阵列布设于深度50 m、目标深度为50 m 时,对于南北极区域,该深度正好处于表面声道深度,声呐在表面声道的作用距离很远,可达100 km;收、发均在50 m 深度时浅海的声呐作用距离大于深海的声呐作用距离,这是因为声线在浅海中柱面传播,能量分布比较均匀,而在深海中,声线在近场区球面传播,声能衰减很快,声源近距离区域存在声影区。还可看出,8 月南半球(冬季)的声呐作用距离优于北半球(夏季)的声呐作用距离,这是因为在冬季,混合层的存在使得表面声呐作用距离变远。
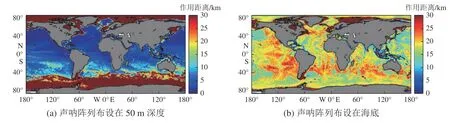
图9 全球海域声呐作用距离预报结果Fig. 9 Forecasting results of sonar action rang in the global ocean
由图9b 可见,当声呐阵列位于海底、目标深度为50 m 时,深海中(水深大于临界深度)目标和声呐阵列之间存在着一种重要的传播信道—可靠声路径,该路径传播距离远(海深的 5~7 倍)、传播损失低。因此,收、发分别位于海底、海面时深海区域(4 000~5 000 m)声呐的作用距离要远大于表面声呐的作用距离;而且深海区域(4 000~5 000 m)的声呐作用距离大于次深海海域(2 000~4 000 m)的声呐作用距离。浅海海域的声呐作用距离与海底底质参数密切相关,硬质海底对声能吸收小,声呐作用距离较远;软质海底容易被声线穿透,声呐作用距离近。
4 结 语
基于自然资源部第一海洋研究所自主研发的全球0.1°分辨率海浪-潮流-环流耦合模式( FIOCOM),本文提出了一种适用于全球海域的水下声学预报系统FIO-GOAFS。该系统结合了一种水声环境特征诊断方法及几种水下声传播模型,能够提供全球海域的水声环境特征诊断结果及水下声场及相关结果预报。本文给出了2021 年2 月和8 月的水声环境特征诊断结果,包括表面声道深度及表面声道截止频率、半声道条件、深海声道轴深度、浅海声道轴深度。诊断结果表明:表面声道深度和截止频率、半声道均具有明显的空间分布特征和季节性变化;半声道主要分布在冬季极地区域及部分浅海区域;深海声道轴深度常年比较稳定,不受季节变化的影响;浅海声道轴主要跟锋面和涡旋有关,北大西洋东部和印度洋40°S 海域部分存在双声道轴。本文最后给出了2021 年8 月声呐阵列分别布放在水深50 m 深度和海底时全球海域的声呐作用距离预报结果。声呐阵列布放在50 m 深度时,声呐作用距离主要与表面声道的分布有关;声呐阵列布放在海底时,声呐作用距离主要与可靠声路径有关。需要指出,声呐系统的作用距离与工作频率密切相关,本文所示声呐作用距离只针对声呐优质因数80 dB、目标声源中心频率100 Hz 的情况。在同等的声呐优质因数、只考虑传播损失的前提下,声源频率越高,声呐作用距离越近;声源频率越低,声呐作用距离越远。
