篮球投篮机器人运行轨迹跟踪方法研究
2023-07-27李华伟李建威
李华伟,李建威
(华北水利水电大学,河南 郑州 450046)
1 引言
现阶段,篮球投篮机器人[1-2]被广泛应用于不同的机器人比赛中,对篮球机器人轨迹跟踪方面的研究还十分稀少。最近几年,国内相关专家给出了一些较好的研究成果,例如文献[3]中优先组建运动学跟踪误差模型,同时在模型的基础上将动态反馈以及自适应控制技术相结合,设计一个合理的自适应控制跟踪器,进而实现全局轨迹跟踪。文献[4]中将柔性机器人前后车体作为独立机器人进行运行学分析,同时利用欧拉—伯努利梁方程求解对应的约束条件,获取运动学模型。
引入反演方法设计出一种滑膜控制器,实现机器人轨迹跟踪。由于以上两种方法未能对运动目标进行检测,导致跟踪结果不准确。为此,提出一种篮球投篮机器人运行轨迹跟踪方法。经实验测试结果表明,所提方法可准确地对篮球投篮机器人运行轨迹进行追踪。
2 方法
2.1 篮球投篮机器人运动学模型
对篮球投篮机器人运动系统的研究中,需要明确机器人的位置和姿态信息,即:
(1)位置信息主要是指篮球投篮机器人在球场坐标系下的具体坐标。(2)姿态代表机器人的朝向。
当机器人在参加比赛的过程中,需要重点关注机器人的位置变化以及姿态变化信息,确保机器人可更好地投入到比赛中。同时,为实时掌握机器人的坐标信息,需要设定对应的坐标系。
对篮球投篮机器人的基本属性进行分析,得到机器人平面速度对应的分解合成关系,同时还需对全向轮的运动方向和速度进行更加深入地分析,最终获取篮球投篮机器人运动学方程[5-6]。
对机器人全向轮速度进行合成,获取如式(1)所示的机器人运动学方程:
式中:s1、s2、s3—篮球投篮机器人在不同方向的线速度变化情况;l(i,j)—车轮和地面接触点之间的距离。
将式(1)转换为矩阵的形式,如式(2)所示。
对模型进行理想化处理,当篮球投篮机器人底部的全向轮和地面会产生一定程度的摩擦,但是并不出现打滑现象。所以,车轮的线速度又能表示为式(3)的形式:
式中:P—篮球投篮机器人中全向轮半径;ω1、ω2、ω3—机器人全向轮转动的角速度。
通过式(2)和式(3)能够获取篮球投篮机器人基本的运动学模型,但是机器人在投篮的过程中对投篮角度进行计算,应该综合考虑篮球的自传对其运动的影响,故引用罚函数,获得投篮机器人的运动学模型:
式中:M—罚函数因子。世界坐标系以及机器人坐标系之间的变换矩阵Bot(θ) 可表示为式(5)的形式:
通过式(5)可获取以下计算式:
其中,变换矩阵的逆矩阵可表示为式(7)的形式:
将式(6)和式(7)进行联合,即可获取以下计算式:
通过以上分析,最终得到改进后的篮球投篮机器人运动学模型,如式(9)所示。
式中:d—旋转速度;smax—最大线速度;R—篮球半径;α—机器人自由旋转角度。
2.2 运动目标检测
考虑到目标跟踪的性能需求,需要选取第一帧运动目标图像作为初始背景,为得到完整的图像,主要使用选择平均法,详细操作步骤如下所示:
(1)通过帧差法获取目标图像的背景序列,将目标区域设定为0,同时背景区域保持保持不变,具体的计算式为:
式中:Bi(x,y)—背景序列图像;li—第i帧图像;P—阈值。
(2)当得到Bi(x,y)值之后,需要计算获取其中像素取值为0的次数c(x,y)。
(3)对背景序列图像进行求和取平均,详细的计算式为:
(4)设定迭代参数,通过帧差法获取差分图像Jxyz,如式(12)所示:
式中:abs—人工确定的数值。
(5)采用选择平均值法获取初始背景图像后,通过帧差法将当前图像进行背景以及运动目标区域划分。
(6)依次进行迭代计算,最终实现目标层图像背景提取。
运动目标检测主要采用改进的帧差背景建模方法获取目标图像,同时引入背景差法,获取运动目标的坐标位置,最终实现运动目标的检测[7-8]。以下给出详细的操作步骤,如图1所示。
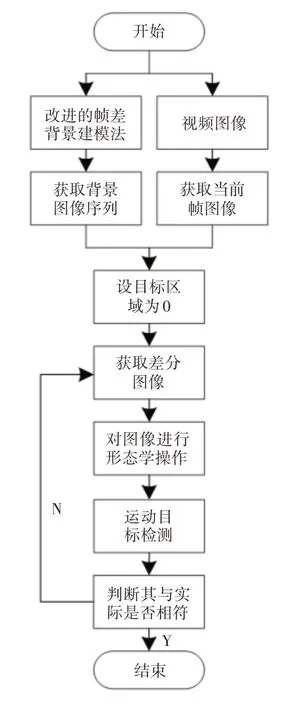
图1 运动目标检测流程图Fig.1 Flow Chart of Moving Target Detection
(1)对帧差背景建模方法进行改进,同时将应用到目标图像中,进而获取目标图像的背景图像。
(2)将当前帧图像li(x,y)和目标图像两者进行差值K(x,y)计算,则有:
(3)对图像进行二值化处理,通过多次迭代获取合适的阈值,最终得到二值化图像Hi(x),y,如式(14)所示:
(4)对得到的二值化图像进行后期形态学操作,同时将目标图像中的无关像素删除,促使目标更加完整,实现目标检测。
为保证目标检测的正确性,需要判断检测的目标是否与实际相符,如果相符则结束,如果不相符,则需要重新迭代,重新检测。
2.3 篮球投篮机器人运行轨迹跟踪
通过上文的分析,需要采用后退控制法进行非线性系统的控制律设计,设定被控对象为:
(1)第一子系统的设计
需要优先获取子系统的实际位置和参考位置,同时对两者之间的差值进行计算,即:c1=v1-cd。
(2)第二个子系统的设计
在对系统进行设计的过程中,可将李雅普诺夫候选函数HII表示为式(16)的形式:
式中:JI—迭代次数;cd—给定的参考位置。
为获取更加准确的篮球投篮机器人运行轨迹跟踪结果[9-10],需要获取一种比较合适的控制算法。通过上述分析可知,可移动机器人并不是可对整个运行轨迹进行追踪。所以,给定的参考轨迹需要满足设定的约束条件。
为准确描述篮球投篮机器人运行轨迹跟踪过程,需要组建两个坐标系,分别为局部和全局坐标系。其中,虚拟机器人需要满足以下约束条件:
式中:S(θR) —虚拟机器人的速度向量。
分析篮球投篮机器人的位姿简化结果,进而获取全局误差pe,详细的计算式为:
式中:pm—机器人的参考线速度。
根据全局位移差以及局部位姿差之间的变换矩阵,可获取局部位姿误差P(θ) 的表达式:
在上述分析的基础上,对动力学模型进行分析,加入滑膜控制算法,通过自适应模糊控制对滑膜增益值进行在线调整,最终实现篮球投篮机器人运行轨迹跟踪。
3 仿真实例
为验证所提篮球投篮机器人运行轨迹跟踪方法的有效性,需要进行仿真实验测试。
为进一步验证所提方法的跟踪性能,进一步分析三种不同方法的角速度误差变化情况,得出详细的实验测试结果,如表1所示。

表1 不同方法的角速度误差测试结果对比Tab.1 Comparison of Angular Velocity Error Test Results of Different Methods
分析表1 中的实验数据可知,所提方法的角速度误差小于0.05%,而其余两种方法获取的角速度误差(0.04~0.13)%之间,所提方法检测的角速度误差明显低于另外两种方法。这主要是因为所提方法对运动目标进行检测,获取的跟踪结果更加准确,而且还可有效减少角速度误差。
获取的篮球投篮机器人运行轨迹跟踪仿真结果,如图2所示。

图2 篮球投篮机器人运行轨迹跟踪仿真结果Fig.2 Simulation Results of Basketball Shooting Robot Trajectory Tracking
分析图2中的实验数据可知,当采用所提方法对篮球投篮机器人的运行进行跟踪时,可获取满意的目标运行轨迹跟踪结果,全面验证所提方法的有效性。
有无干扰情况下跟踪误差率比较情况,如图3所示。


图3 有无干扰情况下跟踪准确率比较Fig.3 Comparison of Tracking Accuracy with and without Interference
分析图3中的实验数据可知,所提方法在有干扰情况下的跟踪准确率位于94%以上,而对比方法的跟踪准确率最高为93%,所提方法优于其余两种对比方法;在无干扰的情况下,所提方法的准确率均在96%以上,而对比方法的跟踪准确率最高为94%,所提方法跟踪效果优于对比方法,全面验证了所提方法的优越性。
4 结束语
针对传统方法存在的一系列问题,设计并提出一种篮球投篮机器人运行轨迹跟踪方法。
仿真实验结果表明,所提方法可有效减少跟踪误差和角速度误差,获取更加准确的机器人运行轨迹跟踪结果,同时也有效验证了所提方法的有效性和优越性。