舰船装备电子电路故障区域节点跟踪定位方法
2023-07-22梅杰,高峰
梅 杰,高 峰
(湖北工业大学工程技术学院,湖北 武汉 430068)
0 引 言
近年来,舰船内部安装的电子装备越来越多,为舰船航行提供便利[1],但却加大了电子装备电路维修的难度,影响舰船航行的安全性。电子电路故障区域节点跟踪定位方法可帮助维修人员快速、精准地找到故障区域节点,及时维修故障元件,为舰船安全航行提供有力保障[2]。胡创业等[3]利用辐射能谱仪模拟电子电路,采集电子电路不同状态下的电路信息,支持向量机依据不同状态下的电路信息进行故障区域节点跟踪定位。该方法的故障区域节点跟踪定位精度为76%。高校平等[4]建立存在故障距离与过渡电阻的时域方程组,同时通过最小二乘法求解该时域方程组,得到故障定位跟踪定位结果。该方法具备较高的故障跟踪定位精度。但这2 种方法均受电子电路的量纲影响,并未考虑电子电路不同故障特性间的联系,无法排除故障变量间相关性的干扰。为此,以改进马氏距离为基础,研究舰船装备电子电路故障区域节点跟踪定位方法,精准跟踪定位故障区域节点。
1 电子电路故障区域节点跟踪定位
利用经验模态分解(empirical mode decomposition,EMD)在舰船装备电子电路原始数据内,提取不同状态下舰船装备电子电路的故障特征,但EMD 提取故障特征时,存在端点效应问题[5-6]。为此,通过最小二乘支持向量机(least square support vector machine,LSSVM),延拓处理不同状态下舰船装备电子电路的原始数据,并将延拓处理后的数据输入至EMD 内,提取故障特征,解决端点效应问题[7]。采用改进马氏距离算法,计算未知故障特征与已知故障集间的马氏距离,以马氏距离为故障区域节点跟踪定位的依据,实现故障区域节点跟踪定位。
1.1 基于EMD 的舰船装备电子电路故障特征提取
利用EMD 在舰船装备电力电路原始数据x(t)内,提取不同状态下舰船装备电子电路故障特征,具体步骤如下:
1) 确定全部舰船装备电子电路原始数据的全部局部极值点a(t),共包含2 种类型,分别是极大、小值点,记作amax(t)与amin(t)。
2) 通过三次样条线分别连接amax(t)与amin(t),获取上、下包络线qup(t),qdown(t)。qup(t)与qdown(t)内包含全部舰船装备电子电路原始数据点。令qup(t)与qdown(t)的均值是q1(t)。
3) 在x(t)内去掉q1(t)获取新的数据z1(t),公式如下:
如果z1(t)是一个固有模式分量(intrinsic mode functions,IMF),则z1(t)为x(t)的首个分量。
4) 若z1(t)不符合IMF 条件,则z1(t)以为原始数据,返回步骤1,获取新的均值q11(t),在z1(t)内去掉q11(t)得到新的数据z11(t),公式如下:
分析z11(t)是否符合IMF 条件,若不符合,反复进行上述操作,共进行k次,获取:
其中:qk(t),z1k(t)为进行k次操作时的均值、IMF 分量;z1(k-1)(t)为进行k-1次操作时的舰船装备电子电路数据。此时,z1k(t)符合IMF 条件,将其记作c1(t),即首个符合IMF 条件的IMF 分量。
5) 在x(t)内,分离c1(t),获取:
其中,r1(t)为舰船装备电子电路的差值数据。以r1(t)为原始数据,重复上述操作,获取x(t)的第2 个IMF分量c2(t),以此类推,反复进行n次,获取x(t)的n个IMF 分量rn(t),表达公式如下:
在rn(t)无法提取符合IMF 条件的分量时,结束操作,获取:
其中:ci(t)为x(t)的第i个IMF 分量;rn(t)为残量,代表x(t)的变化趋势。
6) 计算各IMF 分量的能量Ei,公式如下:
其中,ci(t)的数据长度是Mi;ci(t)内第j个数据是。
7) 以能量熵H为舰船装备电子电路故障特征,公式如下:
其中,E为全部IMF 分量的总能量。
通过上述操作便可获取不同状态下,舰船装备电子电路故障特征H。
但EMD 算法在提取故障特征时,存在端点效应问题。利用LSSVM 算法,延拓处理x(t),得到新的数据x*(t)。LSSVM 延拓处理x(t)的非线性函数为:
其中:αl为拉格朗日乘子;b为偏置;xl,xβ为第l,β个舰船装备电子电路原始数据样本;η为原始数据样本数量;K为核函数。
通过f(x)得到x*(t),公式如下:
式(10)代表通过ε个原始数据xη-ε,预测第l个数据。将预测的数据,作为EMD 算法的输入,完成电子电路故障特征提取。
1.2 基于改进马氏距离的电子电路故障跟踪定位
令舰船装备电子电路故障样本集的维度为v,数量为g,计算故障特征样本向量h至故障样本集m×n矩阵Y间的马氏距离,公式如下:
其中,Yi′为Y内第i′个故障样本。
通过在式(11)内添加权值ω,降低故障特征样本微弱变化对故障跟踪定位结果的影响,公式如下:
第j′个故障特征样本的权值ωj′为:
其中:oj′为N′为第j′个故障特征的电压灵敏度;故障特征样本数量。
利用改进马氏距离跟踪定位电子电路故障区域节点的具体步骤如下:
步骤1求解各故障特征至故障样本集的马氏距离d1,d2,···,dM′,M′为故障样本集内故障数。
步骤2计算d1,d2,···,dM′内的最小值,并找到对应的故障号。
步骤3按照故障号,在故障样本集内搜索故障类型。
步骤4验证dj′是否位于该故障类型的马氏距离范围内,若位于马氏距离范围内,那么故障区域节点跟踪定位成功。
2 实验结果分析
以某舰船装备的部分电子电路为实验对象,该部分电子电路内共包含5 个电阻,记作R1,R2,···,R5,3 个电容,记作C1,C2,C3,电阻与电容均属于电子电路节点,即该部分电子电路内共包含8 个节点,具体信息如表1 所示。
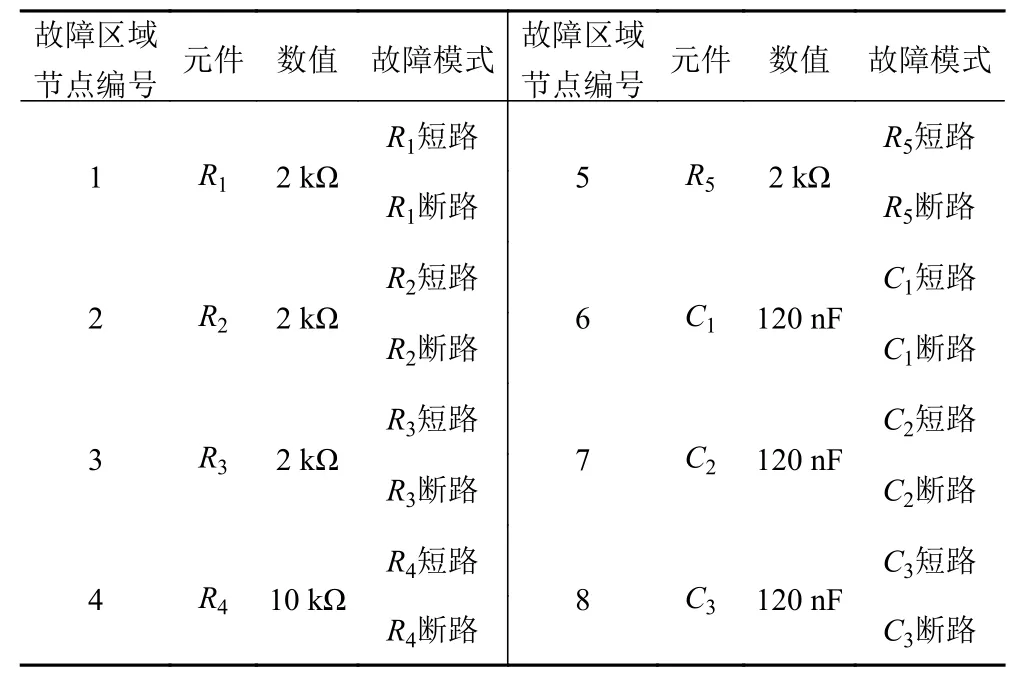
表1 电子电路具体信息Tab. 1 Electronic circuit specific information
利用本文方法对该舰船装备电子电路原始数据进行延拓处理,并提取故障特征,延拓处理结果以及故障特征提取结果如图1 所示。根据图1(a)可知,舰船装备电子电路原始电压数据存在大量冗余数据,变化趋势并不显著,无法为后续故障区域节点跟踪定位提供较好的数据支持。根据图1(b)可知,经过本文方法延拓处理后,可剔除大量冗余数据,可明显看出电压的变化趋势。根据图1(c)可知,本文方法可有效计算各IMF 分量的能量熵,即提取电子电路故障特征。实验证明:本文方法具备较优的数据延拓处理效果,并有效提取电子电路故障特征。

图1 延拓处理结果以及故障特征提取结果Fig. 1 Results of extension processing and fault feature extraction
为该部分电子电路内的各节点均设置2 种故障,分别是短路与短路故障,利用本文方法计算各故障特征的马氏距离,跟踪定位故障区域节点,跟踪定位结果如表2 所示。根据表2 可知,本文方法可有效计算各故障特征的马氏距离,且计算获取的马氏距离值,均处于马氏距离范围内,说明该故障区域节点存在故障,即本文方法可有效跟踪定位故障区域节点位置,且与实际情况一致。实验证明,本文方法可精准跟踪定位故障区域节点。

表2 故障区域节点跟踪定位结果Tab. 2 Node tracking and locating results in the faulty area
3 结 语
新型舰船内包含很多结构繁琐的电子电路,大大增加电子电路故障定位难度。为此,研究舰船装备电子电路故障区域节点跟踪定位方法,精准跟踪定位故障区域节点,为维修人员提供精准的故障位置,提升电子电路故障维修效果。