基于连续滑模控制的水下无人航行器航向跟踪研究
2023-07-22杨晨宇王永华齐向东刘双峰薛晨阳
杨晨宇,刘 丹,刘 璐,王永华,齐向东,刘双峰,薛晨阳
(中北大学 仪器科学与动态测试教育部重点实验室, 山西 太原 030051)
0 引 言
水下无人航行器(UUA)自主、智能、灵活且能长时间工作需要具备良好的控制性能,。但是因为水下环境复杂,水流多变,干扰不可控制,航向稳定性及其精度无法得到保证仍是一个需要解决的问题。
目前实现UUA 向控制的主要方法包括PID 控制、反步法控制、模糊控制及滑模控制等[1]。PID 控制算法较为简便且控制性能较强,在航向控制方面受到广泛应用。但对于模型复杂的控制对象而言,PID 控制无法满足其设计需求,通常需要与其他的控制方法相结合来实现较复杂系统的控制,这会使得其设计变得更为复杂[2]。反步法控制的本质是先拆分,再集成,其主要思想是将高复杂度、高阶数的非线性系统逐一拆分成若干个低阶数子系统,再根据李雅普诺夫稳定性原理对每个子系统分别设计模拟控制量,再将各部分子系统集成,最终实现总体系统控制[3]。该方法针对模型较为简单的系统设计精确,而且当系统存在不确定项时,可以放宽匹配条件。但是设计过程较为繁琐,在航向控制问题中,系统控制量求解时随着系统阶数的增加,微分计算越来越复杂,较难在实际控制中应用。模糊控制方法是一种借助模糊规则和论域分割来实现将复杂系统简单化的控制方法,其不完全依赖于系统数学模型,从而具有较强鲁棒性[4],但由于模糊控制自身局限性,难以实现复杂系统的稳定性分析及整体化设计,使得无法精确控制系统,使得其动态品质变差。
滑模控制相较于其他控制方法而言,其系统结构可以根据当前的状态有针对性地不断优化,且其对外界干扰及模型参数变化不敏感,从而表现出较强的自适应能力和鲁棒性[5]。基于上述,本文采用滑模控制方法,在模糊运动学模型的基础上,采用干扰观测器模拟外界干扰,对系统进行干扰补偿,结合连续滑模控制器实现水下无人航行器的航向跟踪。
1 水下无人航行器建模
1.1 坐标系构建
UUV 的空间运动分解成两部分,第1 部分忽略其形变将其看成在空间中运动的质点,第2 部分为UUA 自身绕重心定点转动。此次建模主要应用了地面坐标系[6](固定坐标系)和潜航器坐标系(运动坐标系)对其空间运动进行分析。
为了分析UUV 在整个空间中的运动,首先建立一个地面坐标系。在地面适合处选择固定点E 将其设置为坐标原点,ζ轴垂直于水平面向下,称为铅垂轴;ξ轴平行于水平面,且UUV 前进方向为正方向;η轴垂直于另外两轴,整个坐标轴满足右手系,如图1 所示。

图1 固定坐标与运动坐标系Fig. 1 Fixed and moving coordinates
1.1.2 UUV 坐标系(运动坐标系)O-xyz
为了分析UUV 在水下的俯仰、首摇、转动问题,建立一个UUV 坐标系[7](运动坐标系)。坐标原点设置在UUV 的重心处,x轴水平于UUV 艇身,前进方向为正方向;z轴垂直x轴,下为正方向;y轴与另两轴垂直且整个坐标系满足右手系。
1.2 运动参数
1.2.1 姿态角
偏航角Ψ:坐标系的x轴在水平面上的投影与地面坐标系ξ 轴的夹角。
俯仰角θ:x轴与水平面的夹角。
横滚角ϕ:z轴与地面坐标系ζ 轴的夹角。
1.2.2 坐标系之间的转化
一般UUV 运动问题需要用到2 个坐标系之间相互转换,适用于航向追踪问题的坐标系转换满足方程[8]
1.3 数学模型
在UUV 系统中,依然满足牛顿第二定律。忽略UUV 的形变将其看做一个刚体,并对其整体进行分析,满足基础动力学方程:
式中:mi为刚体质量;vi为表示刚体质心的速度矢量;Fi为刚体所受的外力。
1.3.1 运动学模型(固定坐标系下)
UUV 行器通常有6 个自由度,并且它的运动可以看做是刚体运动[9]。在UUV 运动过程中,令表示潜航器只有沿着x轴的线速度,其他方向线速度为0,令T为沿x,y,z轴方向的角速度。推导可得
将上式转化为广义向量的矩阵形式为:
由于UUV 运动学模型是在线速度存在非完整约束的条件下得到的[10],减少了速度的维数。统有2 个非完整约束,分别为绕y轴的线速度和绕z轴的线速度。因为速度维度的减少,所以速度在这2 个方向为0。这2 个约束可表示为:
将s、a、p展开并且用表示为:
用向量场f1(g),f2(g),f3(g)和f4(g)线性组合称行的矩阵A(q)来描述速度,则建立如下运动模型:
式中:v1=vx;v2=ωx;v3=ωy;v4=ωz。
《办法》的另一大亮点是将走逃(失联)企业纳入重大税收违法失信案件。将“具有偷税、逃避追缴欠税、骗取出口退税、抗税、虚开发票等行为,经税务机关检查确认走逃(失联)的”明确作为重大税收违法失信案件的标准之一,包括税务局稽查局作出行政决定前已经走逃(失联),以及税务局稽查局作出行政决定后走逃(失联)的。
1.4 模型简化
1.4.1 纵向运动模型
对于UUV,纵向运动可独立存在,将UUV 纵向运动单独拆分出来,为空间的垂直平面运动。对于纵向运动,依然遵循牛顿定律和基础动力学方程[11],则有:
1.4.2 侧向运动模型
由于纵向参数在任何时候都不会完全为0,所以侧向运动并不会单独存在。假设UUV 是理想的直鳍舵上下对称,那么此时的侧向运动不含横滚,此时的侧向运动方程为:
式中:;Λ=κ-β;δr为直舵偏向角;v0为潜航器的额定速度,可由方程解出。
1.4.3 横滚运动模型
UUV 绕x轴转动被称之为横滚,用滚角ϕ来表示其程度大小。分析可得包括横滚的侧向运动模型[12]关于速度v的运动模型为:
式中,δd为差动舵偏角
2 基于数学模型的航向滑模控制
航向控制可以不考虑横滚运动,但侧向运动不能单独存在[13],所以将UUV 看做一个以重心为质点的刚体,考虑其纵向及包含横滚的侧向运动。
将简化模型中的纵向运动模型和包含横滚的侧向运动模型合并,得
航向控制问题[14]可以表现为。
式中:x1为航向角;a,b为时间常数;u为简单系统模型;F为不确定性总干扰。
2.1 干扰观测器设计
建立一个标称模型[15],把建模误差,噪声,还有实际的外部干扰都给增广为一个新的状态变量,将新的状态变量等效输入到控制端,进行干扰补偿,实现对干扰的完全控制。
定义Lyapunov 函数:
合适的参数选取能够更加精准实现外界干扰补偿[16],增强系统鲁棒性。取a=5,b=0.15,d=150 sin(0.1t),k1=500,k2=200。
仿真结果如下
图2 为设计的干扰观测器干扰及观测仿真结果,虚线为实际干扰值,点线为观测器估计值。仿真结果显示虚线与点线很好的贴合,说明设计的干扰观测器可以很好实时估计干扰值。

图2 干扰及观测结果Fig. 2 Interference and results of their observations
2.2 基于干扰观测器的连续滑模控制
将期望航向角设为xd,误差取Z1=xd-x1,则滑模函数为:
基于干扰补偿的滑模控制器设计为:
选择Lyapunov 函数为:
仿真中,用sat(t)饱和函数代替符号函数sgn(s)来降低抖动影响[17]。取a=5,b=0.1,d=150sin(0.1t),xd=sint,k1=500,k2=200,η=5.0,c= 1 5 , Δ =0.10。
图3 为干扰值及其误差对比图。可以看出,实际干扰值越大,那么观测器估计值就越精确,实际干扰值越小,观测器估计值的偏差越大,但误差最大不超过5%,符合设计要求。

图3 干扰及其估计值之间的误差Fig. 3 Error between the interference and its estimate
当预设航向为一个固定值即为一条直线xd=1 时,图4 为航向跟踪仿真结果。实线为预设航向,虚线为航向跟踪。由仿真结果可以看出,随着时间增加,航向跟踪曲线快速和预设航向曲线贴合,说明当预设航向为固定值时,采用基于干扰补偿的航向滑模控制器可以实现对设定简单航向的稳定跟踪,并且对干扰具有强撸棒性和自适应性。
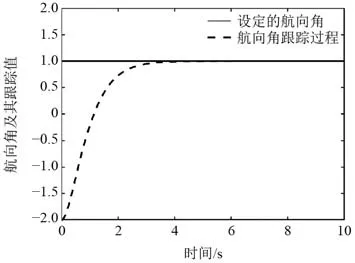
图4 预设定航向及航向跟踪Fig. 4 Pre-set heading and course tracking
当预设航向角设为一个正弦波xd=3sin(3.15t+1.5)时,更方便看出航向角追踪是否出现偏差。图5 为预设航向及航向追踪仿真结果,实线为预设航向,虚线为航向跟踪。由仿真结果可以看出,随着时间增加,预设航向曲线和航向跟踪曲线逐渐贴合,说明采用基于干扰补偿的航向滑模控制器可以实现对设定较复杂航向的稳定跟踪,并且对干扰具有强撸棒性和自适应性。

图5 预设正弦航向及航向跟踪Fig. 5 Preset sinusoidal heading and course tracking
当预设航向为一个自定函xd=acot(cot(theta)/sin(PSI)+tan(PSI)/sin(theta)),PSI=atan(xact(2,: )),theta=-atan(xact(4,:)./sec(PS I))。由图6 的仿真结果了知,当预设航向角出现航向变化速度过快,变化角度过大时,会使得反馈控制信号具有不连续性,具体体现为高频率切换函数。这对整个控制系统带来了不利影响,导致跟踪结果出现较大偏差。但随时间最终预设航向与实际航向会重合。由以上3 种不同函数类型的预设航向仿真结果表明,该连续滑模控制算法在跟踪方面效果较好。

图6 预设自定义航向及航向跟踪Fig. 6 Preset custom heading and course tracking
3 结 论
本文对水下无人航行器进行模糊运动学建模,并对包含不确定因素的系统模型设计一种变结构控制和干扰补偿的连续滑模控制器进行航向跟踪仿真研究。当预设航线为一条直线时,系统可以快速调整航向,并与预设航向重合。接着以正弦波预设航向,改变固定频率时,系统能够快速调整航向与预定航向重合,虽然其间会产生一定误差但在系统可控范围。最后设置自定义无规律预设航向,若预设航向变化速度过快或变化角度过大时,系统由于反馈控制信号的不连续性导致无法及时调整航向,但随着时间增加最终会与预设航向重合。以上3 个仿真实验证明基于干扰补偿的滑模控制器可以实现对于航向的稳定跟踪,并且具有较强的鲁棒性。