用于减小PMUT“盲区”的回波检测方法
2023-07-18王光华张玉超胡益民张士钦周红宇赵祥永李加东
王光华,张玉超,胡益民,苗 斌,张士钦,周红宇,赵祥永,李加东,3
(1.长春理工大学 机电工程学院,吉林 长春 130012;2.中国科学院 苏州纳米技术与纳米仿生研究所,江苏 苏州 215123;3.中国科学院 多功能材料与轻巧系统重点实验室,江苏 苏州 215123;4.上海师范大学 数理学院,上海 200234)
0 引言
超声波测距技术具有成本低、抗干扰能力强、可检测透明材质等优点,被广泛应用于测量领域,包括距离测量(在空气中)、声纳、流量监测等[1]。近年来,随着可穿戴式设备、微型机器人和无人机等应用平台的发展,对自身装配的超声传感器提出了微型化、易集成的技术需求。相较于传统的超声波传感器,基于微机电系统(MEMS)技术的压电微机械超声波换能器(PMUT)继承了传统超声波传感器优势,同时兼具微型化、低功耗、易集成的技术优势,具有广泛的应用潜力[2]。
盲区是评价超声波传感器测距能力的一个重要技术指标[3]。PMUT在收发一体式测距模式下,去除激励源后接收波形产生拖尾现象,导致近场原始回波信号难以区分,造成测量盲区。为了缩减测量盲区,提升近场可测量范围,已有学者开展相关研究并提出了解决方案。针对传统的块体型超声器件,相关文献提及的方法有全桥发射驱动波[4]、并联电阻器[5]、Golay互补对技术[6]及调节超声波功率[7],但目前尚未应用于PMUT。关于PMUT器件,2011年加州大学David A.Horsley团队提出从接收到的信号中减去在校准阶段所测量的发射和拖尾波形,以此削弱测量盲区[8]。2018年浙江大学刘鑫鑫等提出了一种通过相移减少PMUT拖尾时间的方法,使振动频率为399.7 kHz的超声器件减小了3.5 cm的测量盲区[9]。2021年武汉大学吴志鹏等提出了一种基于传递函数的闭环抑制系统,抑制PMUT的拖尾时间以减少测量盲区,使PMUT阵列的测量盲区减少了约40%[10]。上述研究通过抑制拖尾时间,改善测量盲区,均取得了一定的成效,但在实际应用中,不同PMUT器件的频率、阻抗等参数指标存在一定的差异性[11],因此,其测量电路需针对不同的PMUT器件做出适当调整,普适性较差,同时增加了发射电路的复杂度。
本文提出了一种在拖尾段识别回波信号的方法,无需抑制拖尾信号,亦无需在收发电路上针对不同PMUT器件做过多参数处理,实现了在300 cm的测距量程内,测量盲区减少约50%,有一定的普适性,具有一定的工程应用价值。
1 PMUT电路设计及信号压缩
1.1 收发一体式PMUT工作原理
PMUT属于压电型器件,可将电能转换为机械能,反之亦然。在收发一体式的工作模式下,发射阶段,器件受电脉冲信号激励,压电材料发生逆压电效应,促使振动薄膜产生一定频率的弹性振动并发射一串超声波。接收阶段,超声波经过目标物反射后激励振动薄膜产生压电效应,将声波信号转换成电信号。通过对PMUT器件电极间的电信号进行分析,获取收-发超声波之间的时间差并乘以声速(空气中)来计算距离信息,即TOF(Time of flight)原理[2,12]。
1.2 收发电路设计
PMUT在工作时分为发射和接收两个阶段,为了将接收电路与发射电路实时接通与隔离,电路中采用了三态门逻辑控制器件。接收电路负责接收并调理回波信号,其中前置放大器、带通滤波电路、全波整流及低通滤波电路分别用于阻抗匹配、滤除噪声、回波整流及包络,便于后端ADC采集。图1为测距电路设计图。

图1 测距电路设计框图
图2分为拖尾段无回波信号和拖尾段有回波信号两种情况。拖尾段有回波信号难以检测,主要有以下两方面因素:
1) 拖尾信号幅值较大,回波信号较弱,传统的阈值检测和最大值检测失效。
2) 采用传统的线性放大器导致近距离接收信号出现饱和、削顶(见图3)。

图3 线性放大回波信号
对数放大器具有压缩大动态的输入动态范围(DRI)到小动态的输出动态范围(DRO)的独特特性[13],它能使弱信号得到高增益放大,对于强信号则自动降低增益,避免饱和。信号的输入、输出关系式为
(1)
式中:VOUT为输出电压;VY为对数斜率;VIN为输入电压;VX为对数截距[14]。本电路中使用的对数放大器型号为AD8310,属于解调对数放大器,可实现拖尾信号与回波之间进行大范围压缩,锐化回波包络信号(见图4(a))。

图4 对数放大回波信号波形图
2 极值检测方法
极值检测方法的原理是利用前级调理电路将回波信号进行非线性压缩以及包络处理,形成若干便于检测标记的极值点。
图4(a)、(b)分别为回波信号位于拖尾段、远距离两种情况经前级电路处理后的包络曲线。图4(a)中,从0至A点时间区域为PMUT器件施加激励脉冲信号的包络部分,A点之后,PMUT进入拖尾段。由于目标物在近距离的情况下,反射回的超声波能量较强,需要经过来回多次震荡,能量才能被完全耗散,因此,在回波中出现了一次回波波峰(B点),二次回波波峰(C点),三次回波波峰(D点)…。依此类推,随着能量的耗散,这些波峰的电压幅值强度依次递减。在实际检测中,一般取一次回波主波峰对应的时间点计算距离值。
上述两种情况中,由于激励源与拖尾波形的存在,回波信号峰值位于曲线极大值点处。为了搜索回波极值点,首先通过ADC采集包络回波信号并将其离散化,得出一组包络解集:
M=[y(x0),y(x1),y(x2),…,y(xi-1),
y(xi),y(xi+1)]
(2)
式中:y为ADC转换值;xi为第i点采样顺序,0≤i≤3 000。寻求极大值点:
(3)
式中R为常量。从解集M第一个元素开始依次检索,找出第一个极大值点并记录采样顺序xi。近场中,回波信号幅值极强,不易受噪声干扰;远场中,基线噪声的存在易出现不是回波信号引起的“虚假极值点”,以xi左侧xi-2为起始点,检测后面数据的最大峰值点(在可检测范围下,回波幅值大于基线噪声),过滤“虚假极值点”,确定最大峰值点采样顺序xi+t即可得出回波时间并计算相应距离值,具体流程如图5所示。

图5 极值检测方法流程图
3 实验验证与结果分析
3.1 极值检测法有效性测试分析
选取谐振频率为121.0 kHz的PMUT器件,搭建测试环境如图6所示,主要包括测距电路板、示波器(Tektronix Mso54)、PC机,分别用于检测回波并进行数据处理、监测回波信号、打印输出xi+t。
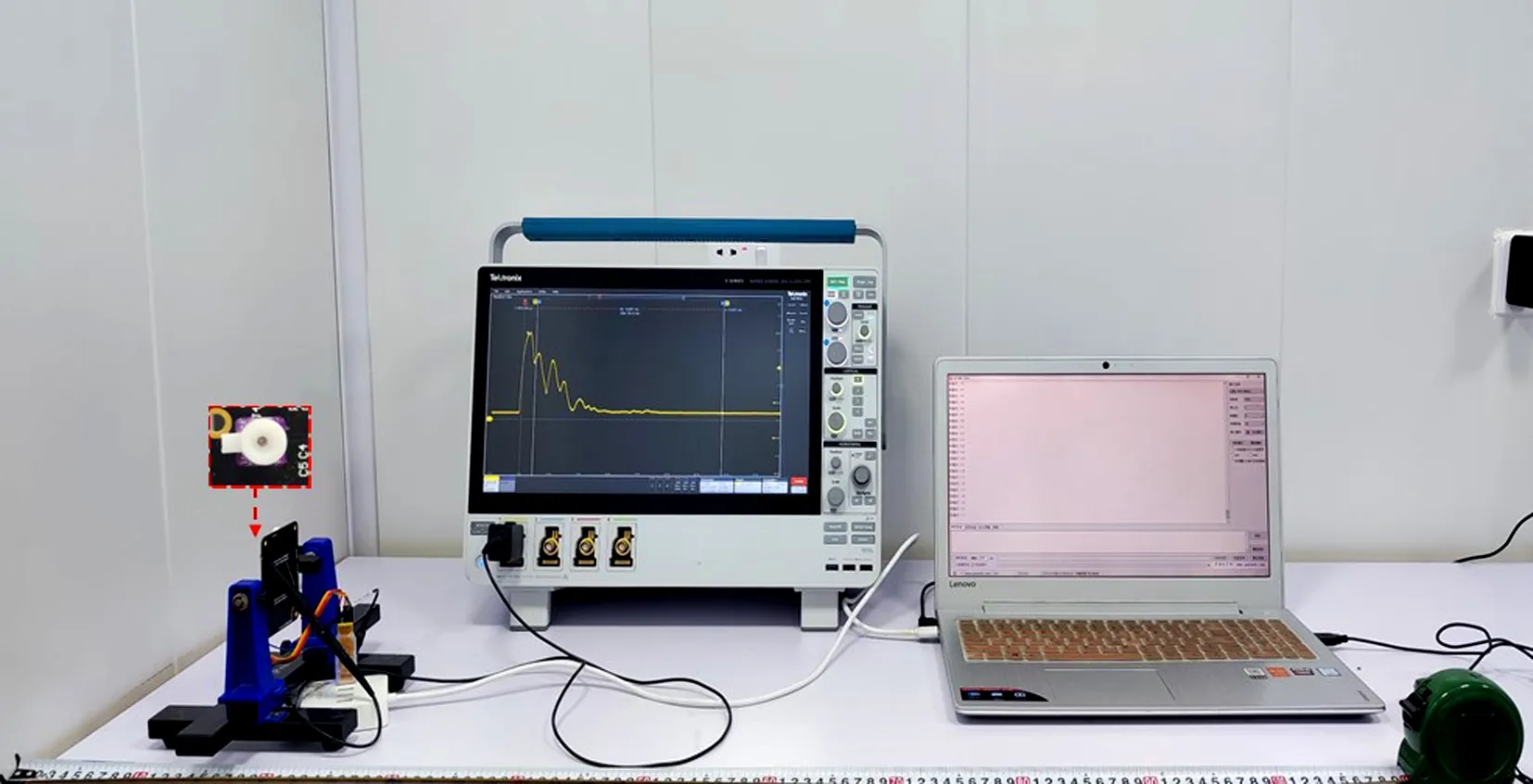
图6 测试装置图
用16位的ADC采集包络信号,设定采样时间间隔为7.6 μs,通过STM32微控制器处理ADC采集的数据。根据极值检测方法找出回波峰值对应的采样顺序xi+t并打印输出,先后测量20组样本点,部分测试数据如表1所示。

表1 距离标定实验数据
对所测样本点数据使用最小二乘法进行拟合:
l=0.13xi+t+9.1
(4)
式中一次项系数0.13表示相邻两个采样点代表的距离值为0.13 cm。由于PMUT工作在收发一体模式下,采样时间为实际距离计算距离时间的2倍,根据一半采样间隔时间3.8 μs计算当前的声速为342.1 m/s。测试环境温度为19.3 ℃,该温度下理论计算声速为343.2 m/s。由于ADC离散化回波信号存在无法刚好采集到模拟量极值点或峰值点概率,存在一定误差,同时考虑其他环境因素及测量误差影响,计算声速值与理论值基本吻合。
3.2 极值检测法普适性测试分析
为进行极值检测法普适性测试分析,选取8组谐振频率不一的单阵元PMUT器件(见图7),如3.1节实验步骤测算距离值。对比普通阈值检测法和本文方法检测量程,结果表明,8组频率及性能各有差异的PMUT在最远测距超出300 cm的情况下,测量盲区均缩减至10 cm附近,有效提升了约50%(见表 2)。8组器件经本文方法检测的量程近场下限值不一,造成以上差异的主要因素是:PMUT激励过程中无法检测回波,由于不同器件的谐振频率不同,在激励脉冲数量一定的情况下,激励时间不同,最终影响PMUT近场不可检测范围。在后续的工作中可在距离计算公式中引入激励时间参数进行自动修正。

图7 PMUT频率-阻抗相位图

表2 8组器件测试数据
4 结束语
针对PMUT测距近场存在拖尾段,导致近距离回波不易区分,造成测量盲区,影响近场测距范围的问题,本文提出了一种在拖尾段识别回波信号的方法,并对该方法进行了相关的实验验证。结果表明,经过信号调理电路后,拖尾段内的回波可被极值检测方法检测并计算距离值,该方法同样适用于远距离测量。在被测试的8组器件中,初始测量盲区均在20~30 cm。引入该方法可将8组性能有差异的器件近场测距下限压缩至10 cm附近,这为后续PMUT空气介质中近场测距的研究奠定了基础。