内嵌大量程光纤光栅传感器的智能拉索研制及应用
2023-07-18胥献忠周怀健孙玉涛沈全喜
黄 忠,胥献忠,邓 耀,周怀健,孙玉涛,沈全喜
(1.中国建筑第五工程局有限公司,湖南 长沙 410004;2.桂林理工大学 地球科学学院,广西 桂林 541004)
0 引言
随着科学技术和社会经济的不断发展,建筑结构逐渐向大型化、复杂化及轻量化发展,而密闭索[1]作为一种新型的建筑结构拉索,能满足不同类型建筑结构的建造需求。密闭索索体由多层不同类型的钢丝经旋转捻制而成,具有耐腐蚀、耐火、不旋转及摩擦系数大等特点。密闭索作为建筑结构中重要的受力构件,其受荷状态直接对建筑结构的施工和安全使用产生重大影响。因此,有效监测拉索索力是结构健康监测[2-4]的重要任务之一。
目前,拉索索力的测量方法一般通过获取由外加荷载引起索体某种物理参量的变化,间接计算索力大小。在工程应用中,常用的索力测量方法[5-7]有压力表测量法、压力传感器测量法、振动频率法、电阻应变片测量法及磁通量传感器测量法。压力表测量法和压力传感器测量法在使用前需要对设备进行校准,且设备在经过一段服役期后,测量误差较大;振动频率法在索-阻尼器体系的索力计算中存在较大误差;电阻应变片测量法的粘贴工艺和胶水的性能直接影响测量精度,且索力绝对值也难以确定;磁通量传感器测量法易受外界电磁干扰的影响。为了解决上述索力监测中存在的问题,研究人员将目光聚焦在一种新型传感器——光纤光栅传感器[8-10]。光纤光栅传感器以光为传感媒介,具有抗电磁干扰、耐腐蚀、传输速度快及信息容量大等特点。基于上述特性,研究人员开始探索将光纤光栅传感器引入工程结构的健康监测领域。针对拉索的索力监测,庄劲松[11]将光纤光栅传感器封装在钢管中,并通过支座将封装后的传感器安装在靠近锚端的斜拉索内部,实现大桥斜拉索索力的智能化监测;Gomez-Martinez R等[12]将光纤应变传感器安装在斜拉桥主梁底部,对桥梁的静、动载试验进行监测;王天鹏等[13]设计了一种可更换光纤光栅传感器的测力环,将数个光纤光栅传感器均匀安装于环形弹性体四周,并利用波分复用技术将该测力环进行组网,实现拉索索力自动化监测;Li Feng等[14]将光纤光栅传感器耦合在螺旋碳纤维筋内部制成智能螺旋碳纤维筋,并利用此智能筋对钢绞线拉索荷载进行监测;刘晓江等[15]利用GFRP封装光纤光栅传感器,将其锚固在钢绞线表面进行拉伸实验,验证了该封装结构用于实际工程测量的可行性;李红明等[16]将光纤光栅应力和温度传感器封装在不锈钢管内部,利用基座夹具将传感器安装在拉索表面,通过测量基座间拉索的应变推算出索力变化值。
虽然现有的光纤光栅传感器索力监测方案能够实现索力监测,但传感器封装结构形式复杂,且安装方式为螺栓固定,索力监测的稳定性及耐久性无法得到保障。针对光纤光栅传感器在索力监测中存在的安装条件及监测量程不足的问题,本文设计了一种光纤光栅智能拉索。通过在拉索内部中心丝上设置纵向凹槽,使用特种胶粘剂将光纤光栅传感器封装在凹槽内部,在基本不影响拉索力学性能的情况下,利用索体自身对光纤光栅传感器进行封装保护。其结构型式简单,索力监测更准确,满足拉索的索力全寿命动态实时监测。
1 光纤光栅传感原理
利用光纤材料的光敏性,通过紫外光曝光的方法对光纤纤芯进行刻写,使纤芯的折射率沿轴向周期性变化,从而形成永久性的相位光栅,制成高灵敏度光纤光栅传感器。当一束宽带光入射光纤光栅时,满足一定条件的光被光栅反射回来,而剩余的光则会被透射出去,如图1所示。反射光的中心波长λB与光栅的折射率变化周期Λ、纤芯有效折射率neff有关,即:
λB=2neffΛ
(1)

图1 光纤光栅反射和透射特性
光栅的neff和Λ因受应变、温度等因素影响,导致光纤光栅传感器反射中心波长发生移动[17-18]。通过解调传感器反射中心波长能够精确检测外部信息变化。在工程结构监测中,结构的受荷变形是造成波长漂移最直接的因素,波长变化量[19-21]为
(1-Pe)ε
(2)
式中:ΔλB为光纤光栅波长变化量;P11、P12为弹光系数;υ为泊松比;ε为应变。
由式(2)可见,波长变化量与应变具有一定的线性关系,这从理论上保证了光纤光栅在实际监测应用中具有良好的线性度。
2 光纤光栅智能拉索设计
拉索选用ZS密闭索,索体直径为∅65 mm,有效横截面积为2 980 mm2,弹性模量为(1.6±0.05)×105MPa,强度级别为1 570 MPa,最小破断荷载为4 100 kN,拉索构造如图2所示。本文选用均匀光纤光栅传感器作为监测元件,其折射率和栅格周期均为常数,且反射率高、反射带宽窄,结构及参数如表1所示。拉索主要承受轴向荷载,其节点间荷载分布基本一致,故将传感器布设在距离拉索端部3 m处。

图2 ZS密闭索

表1 光纤光栅性能参数
解调仪解调范围为1 525~1 565 nm,采样频率为1 Hz,波长精度为2.5 pm,分辨率为1 pm。
光纤光栅智能拉索的制作过程:
1) 索体捻制前选取拉索中心丝,在其表面沿长度方向刻置深0.5 mm、宽1 mm的凹槽。
2) 中心丝持荷状态下,使用特种胶粘剂将光纤光栅传感器封装至凹槽内部,胶粘剂到达指定强度后,卸载中心丝,利用压应变的恢复,扩大光纤光栅传感器的监测量程。
3) 将中心丝与外丝进行捻合,制成光纤光栅智能拉索,并将光纤从索体端部引出,如图3所示。采用内嵌技术将光纤光栅传感器内嵌于索体内部,不额外占用安装空间,施工过程方便,无需增加任何辅助工艺,并且在安装和使用过程中拉索钢丝能有效保护光纤光栅传感器,使其免遭破坏。

图3 光纤光栅智能拉索
3 光纤光栅智能拉索张拉试验
拉索长度为6 m,对拉索先后进行最大张拉荷载为60%Pb、80%Pb(极限荷载Pb=4 100 kN)的重复张拉试验。为消除由拉索自重导致的索体弯曲,初始荷载设定为250 kN,张拉采取逐级加载,每级荷载为250 kN,每级加载完成后持荷5 min,记录荷载、光纤光栅传感器波长读数,加载至最大张拉荷载后卸载,重复上述张拉过程3次。试验过程中环境温度保持恒定,试验设备如图4所示。

图4 试验设备
光纤光栅传感器波长变化量与张拉荷载的关系如图5所示。

图5 波长变化量与荷载关系曲线
由图5可知,在拉索加载和卸载过程中,光纤光栅传感器的监测波长随着荷载的改变而变化,监测数据具有很好的线性度和重复性,且光纤光栅传感器的监测量程可达到80%Pb。图5(a)中图形有部分弯曲,这可能是拉索自身存在非弹性变形,随着荷载增大,拉索非弹性变形逐渐消减。图5(b)中图形线性度较好,其原因在于拉索经过前3次60%Pb的张拉,非弹性变形基本消除,故后续分析都以最大张拉荷载达到80%Pb的拉索为分析对象。
3.1 光纤光栅智能拉索灵敏度
拉索在安装前都需进行预张拉,从而达到消减非弹性变形的目的,以最大张拉荷载80%Pb为分析对象,对光纤光栅智能拉索灵敏度进行分析。光纤光栅智能拉索的灵敏度是指工作状态下光纤光栅传感器波长变化量与荷载变化量的比值。通过对拉索3次循环张拉测试数据的拟合处理,光纤光栅智能拉索的灵敏度如表2所示。
由表2可知,光纤光栅智能拉索的监测灵敏度平均值为0.002 66 nm/kN,线性相关系数达到0.99。
3.2 光纤光栅智能拉索线性度
线性度ξL是衡量传感器监测特性的重要指标,表示传感器输出数值曲线与线性拟合直线间的最大偏差与满量程输出的百分比,即:
(3)
式中:ΔλL,max为光纤光栅智能拉索波长变化量的算术平均值与波长变化量拟合值之间的最大差值;ΔλFS为光纤光栅智能拉索波长满量程输出值。由式(3)可知,ξL值越小,线性度越高。
根据张拉数据计算出光纤光栅智能拉索波长变化量的算术平均值,采用最小二乘法进行线性拟合,得到拟合直线:加载y=0.002 65x-0.591 97、卸载y=0.002 67x-0.576 76。将张拉荷载代入拟合直线,得到波长变化量拟合值,最后计算出偏差值,计算结果如表3所示。由表可见,光纤光栅智能拉索波长变化量平均值与拟合值的最大差值分别为加载0.237 nm、卸载0.249 nm。根据式(3)计算得到光纤光栅智能拉索线性度加载时ξL=2.76%,卸载时ξL=2.86%。

表3 光纤光栅智能拉索线性度计算
3.3 光纤光栅智能拉索迟滞
迟滞表示传感器在同一输入量下,正、反行程的输出信号不一致现象。对光纤光栅智能拉索加载、卸载试验数据进行分析,得到光纤光栅智能拉索加、卸载波长变化量的参数如表4所示。
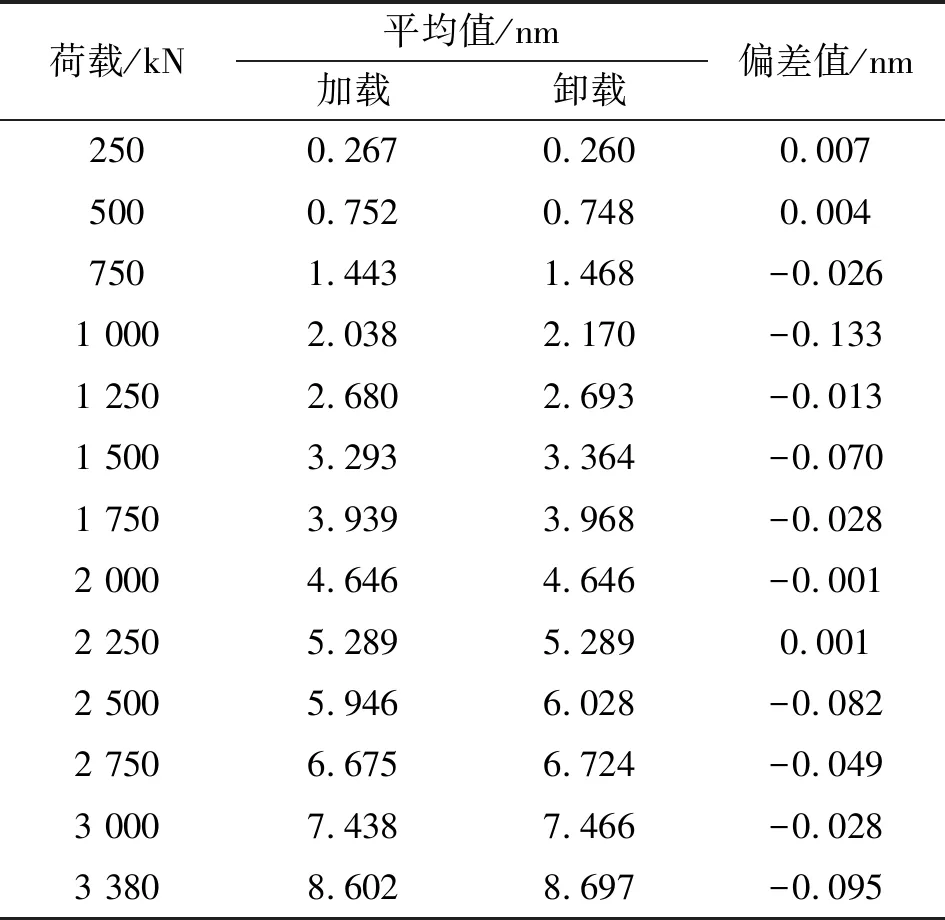
表4 光纤光栅智能拉索迟滞性计算
光纤光栅智能拉索的迟滞ξH表示为传感器在加载、卸载中波长变化量最大偏差值与满量程输出值的比值,即:
(4)
式中ΔλH,max为加载、卸载过程中光纤光栅智能拉索波长变化量平均值的最大差值。
根据表4可得,光纤光栅智能拉索在加、卸载过程中最大波长偏差值ΔλH,max=0.133。由式(4) 计算可得到ξH=1.53%。
3.4 传感器重复性
重复性是指传感器在相同的工作条件下,连续多次加载或卸载时所得监测曲线不一致的程度。传感器的重复性误差反映在相同荷载作用下,多次加载或卸载过程中,光纤光栅智能拉索波长变化量能否一致的性能指标,重复性误差为
(5)
式中:c=t0.95(t分布,置信概率为95%)为包含因子;ΔλR,max为标准偏差最大值。依据贝塞尔公式法计算标准偏差,有:
(6)

根据拉索3次循环试验的测试数据,分别计算加载、卸载时的标准偏差,结果如表5所示。
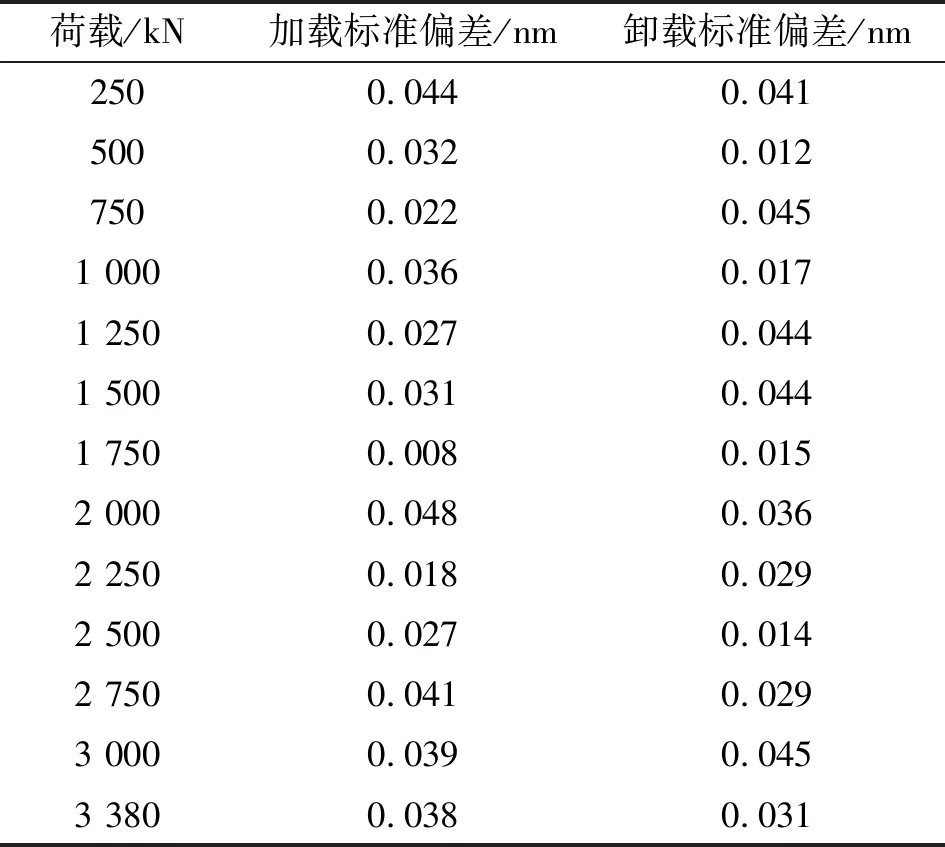
表5 加载、卸载标准偏差计算结果
根据表5可知,加载时最大标准偏差为0.048,卸载时最大标准偏差为0.045,当保证95%的置信度时,包含因子c=4.303。由式(5)可得光纤光栅智能拉索的加载重复性误差ξR=2.40%,卸载重复性误差ξR=2.23%,证明光纤光栅智能拉索具有良好的重复性。
3.5 总精度
为了全面综合地评价传感器的性能优劣,一般用总精度(或总不确定度)衡量传感器性能。总精度反映了在一定置信度下,传感器的实际输出对其理论特性或工作特性的偏离皆不超过的一个范围。总精度为
(7)
通过重复张拉试验,分别对传感器的迟滞、线性度、重复性指标进行分析,将上述数据代入式(7),可得光纤光栅智能拉索的总精度P=4.03%。光纤光栅智能拉索具有优良的感知性能,目前该新型拉索已被应用于顺德区德胜体育中心项目,通过内置光纤光栅传感器对拉索进行施工监测和长期监测,保障结构的安全使用。
4 工程应用
将智能拉索应用在某体育场馆马鞍形索网结构中,其中索网部分长轴为109 m,短轴为71 m。 索网标高范围为12.85~20.85 m,跨中标高为16.85 m。马鞍形索网短向矢跨比为4/71=1/17.75,长向矢跨比为 4/109=1/27.25,如图6所示。

图6 索网结构
选取编号为S1、S2、S3的3根拉索。为了控制结构的整体形状,拉索两端同步分级张拉,同步张拉细分为5级:初紧状态—10%Pb—20%Pb—30%Pb—40%Pb—45%Pb。索网施工过程中分别利用光纤光栅传感器和液压千斤顶对索网张拉进行监测,根据3.1节中光纤光栅智能拉索的监测灵敏度,通过光纤光栅传感器的波长变化值计算出拉索监测荷载,并与千斤顶的张拉荷载进行对比,如表6-8所示。
注:Δλ为波长变化量;FFBG为光纤光栅监测荷载;FZ为千斤顶荷载。
由表6-8可见,光纤光栅传感器能对拉索的张拉过程进行监测。在张拉初始阶段,光纤光栅监测荷载与千斤顶荷载误差较大,分别达到-12.13%、-8.50%、-9.62%;随着张拉过程的进行,误差迅速减小,当张拉完成后两者误差分别为-1.24%、2.95%、-0.11%。其原因可能是拉索卷起呈圆盘状运输,直到安装前才恢复直线状,所以在初始张拉阶段,索体存在弯曲和非弹性变形,导致误差较大。随着张拉荷载的增大,上述因素逐渐消除,误差也随之减小。
5 结论
本文通过在拉索中心丝设置纵向凹槽,结合“预应力原理”将光纤光栅耦合在拉索内部制成大量程光纤光栅智能拉索,并对其传感监测性能进行了试验研究,得出以下结论:
1) 光纤光栅智能拉索可实时监测拉索荷载变化,荷载监测灵敏度约为0.002 66 nm/kN,且循环张拉过程中灵敏度波动甚微,验证了光纤光栅传感器封装设计的可行性,为光纤光栅智能拉索后期的工程应用做好铺垫。
2) 光纤光栅传感器监测量程可达到拉索破断荷载的80%,远超拉索的服役荷载。由此可见,该内嵌光纤光栅智能拉索能有效实现对拉索在施工和服役阶段受荷状态的监测,更好地保证了工程结构的安全性和可靠性。
3) 通过光纤光栅智能拉索循环加载、卸载试验,对传感器的监测数据进行分析处理。结果表明,光纤光栅智能拉索线性度误差≤2.86%,迟滞误差≤1.53%,重复性误差≤2.40%,总精度误差≤4.03%。该光纤光栅智能拉索具有良好的监测性能,为解决索力监测难题提供了新方法。
4) 工程应用中,光纤光栅传感器能准确监测拉索荷载。索体张拉完成后,光纤光栅传感器监测荷载与千斤顶荷载误差最大为2.95%,验证了光纤光栅传感器索力监测的准确性。