智能网联环境下管理车道设置策略与影响因素分析
2023-07-18傅泽新陈旭梅王宇擎张义鑫
傅泽新,陈旭梅,王宇擎,张义鑫
(北京交通大学 交通运输学院,北京 100044)
自动驾驶技术的出现为缓解交通问题提供了新的解决方案,相比于HDV,CAV具有更敏感的环境感知能力和更迅速的驾驶操作响应能力。根据美国交通部AASHTO(American Association of State Highway and Transport Officials)估算[1],CAV的推进与发展是较为漫长的过程,在早期发展阶段,必将存在由CAV与HDV组成的新型混合交通流,与单纯的CAV交通流相比,由于CAV与HDV间的干扰与交互,混合交通流所具备的特性将更加复杂,间接影响道路的通行能力且进一步增加了潜在的碰撞风险。管理车道的设置在一定程度上能够有效解决新型混合交通流带来的问题。现如今,众多学者针对管理车道设置的优劣效果进行了充分的实验探究[2-4],结果表明,将不同类型车辆通过管理车道进行隔离,在有效提升道路通行能力、降低道路通行延误与减少车辆间碰撞风险发挥了作用。分析学者们已有的研究成果发现,近几年在融入CAV的管理车道研究领域,学者们主要聚焦于CAV专用道设置对交通流的影响、通过仿真获取最优管理车道布设方案两方面[5-10]。在低CAV渗透率时,管理车道只允许CAV车辆通行的策略对道路实际通行能力存在较大的影响,此外,大多数学者在研究混合交通流管理车道设置策略时,只考虑了CAV与HDV两种车型,并没有更好的贴近现实情况。因此,本文考虑多种车辆类型、不同种类CAV车辆、管理车道选择概率、CAV渗透率、换道目标间隙等关键参数,从交通流运行效率与安全两个维度,选取道路通行能力、平均延误、车辆间碰撞风险3个指标针对管理车道对交通流影响及其最优布设条件进行研究分析。
1 空间路权导向的车道设置方案
1.1 混合交通流组成
为准确贴合实际道路交通流组成状况,考虑配置CACC(cooperative adaptive cruise control)与ACC(adaptive cruise control)功能的两种CAV车辆类型,与其不同车头时距对通行能力的影响[8],文中研究的新型混合交通流由人工驾驶的小汽车(human driven-car,HD-car)、人工驾驶的公交车(human driven-bus,HD-bus)、自适应巡航控制的小汽车(adaptive cruise control-car,ACC-car)、自适应巡航控制的公交车(adaptive cruise control-bus,ACC-bus)、协同式自适应巡航控制的小汽车(cooperative adaptive cruise control-car,CACC-car)、协同式自适应巡航控制的公交车(cooperative adaptive cruise control-bus,CACC-bus)6种类型的车辆组成,CACC与ACC系统控制的车辆统称为CAV,HD-car包含HOV与非HOV,各类型车辆在道路中的比例分别由ρHc、ρHb、ρAc、ρAb、ρCc、ρCb表示,且满足:
ρHc+ρHb+ρAc+ρAb+ρCc+ρCb=1
(1)
1.2 管理车道设置方案
在考虑管理车道设置策略时,学者们更多考虑了CAV的空间路权[5-10]。因此,本文重点考虑CAV和HOV专用道,为不同车辆赋予不同空间路权,针对快速路设置以下4种场景,其中,场景一与场景二重点关注CAV,场景三与场景四关注HOV与CAV。4种场景如图1所示,专用道设置于道路左侧车道。
2 考虑车间通信的驾驶行为建模
2.1 车辆纵向跟驰行为建模
为了描述新型混合交通流中除CACC车辆外,其余车辆间纵向相互作用关系,本文使用改进的IDM+模型作为描述车辆间纵向关系的基础模型,IDM+模型变量包括跟驰车速度、与前车间距以及两车间速度差等[11],模型表示为
(2)
(3)

本文中CACC车辆主要依据加州伯克利PATH实验室提出的恒定车间时距策略的CACC模型[12],其表示为
e=xi-1-xi-Tvi
(4)
(5)
式中:xi为跟驰车辆位移,vi为跟驰车辆速度,e为实际距离与期望距离之间的误差,T为最小安全车头时距,i-1代表前车,v(t-1)为车辆前一时刻速度,kp、kd为不同模式下的权重值。
2.2 车辆横向换道行为建模
2.2.1 换道动机
根据车辆行驶过程中,追求利益动机的不同,本文将换道行为分为战略式换道、合作式换道、速度增益式换道、保持右行式换道4种,分别定义为:1)战略式换道(Strategic),车辆在实际行驶过程中,需要通过换道继续保持行进路线;2)合作式换道(Cooperative),换道车辆发出换道信号,同车道或目标车道相邻车辆采取减速或换道措施协助换道车辆成功换道;3)速度增益式换道(SpeedGain),车辆为达到期望的行驶速度而进行的换道行为;4)保持右行式换道(KeepRight),车辆为保持右行而做出的换道行为。战略式换道、保持右行式换道和合作式换道是必要性换道,而速度增益式换道为非必要性换道,在保证交通流通性效率的前提下,减少不必要的换道是提高道路安全性的措施之一。
2.2.2 换道间隙
车辆在换道过程中,目标车道相邻车辆间隙是决定是否可以换道的重要参考依据,其示意如图2所示,面向新型混合交通流,道路上车辆换道间隙的分布,在一定程度上可定性描述车流整体运行的安全性与稳定性,车辆换道目标车道换道间隙表示为

图2 车辆换道目标车道换道间隙
T=LB-LA
(6)
式中:T为目标车道换道间隙,m;LA、LB分别为A、B车在车辆行驶方向上的位置。
3 基于车头时距的混合交通流影响评估建模
3.1 基本假设与概念
为了使研究更加具有适用性,根据相关文献研究[13-15],进行如下假设:假设1,CAV可获取路段所有车辆信息及周边环境信息;假设2,假设所有车辆均为自然到达,交通流在道路均匀分布;假设3,当车辆间跟驰距离小于期望间距时,跟驰后车将保持自由流速度行驶,即不存在激进型微观驾驶行为。
3.2 混合交通流通行能力建模
计算道路通行能力需综合考虑每条车道平均车头时距,有m个车道的道路通行能力计算公式为
(7)
式中:C为通行能力,m为车道数量,Tn为第n条车道上平均期望车头时距。
以场景一为例,当CAV渗透率已知时,由于所有的CAV选择专用道行驶,普通车辆会选择普通车道,因此,通过普通车道与专用车道的流量必然满足kp倍关系,其取值与各类型车道车流量有关,场景一k1的计算公式为
(8)
同理,k2、k3、k4计算公式分别为
(9)
式中:ρ为CAV渗透率,kp为第p种场景下选择普通车道与管理车道的车流量比例。
在计算通行能力时,考虑单车道上前车与后车出现的概率,即可计算得到每种车辆类型平均车头时距出现的概率,针对每种车辆类型车头时距进行加权平均,得到每条车道平均期望车头时距,依据式(7)可获得单车道通行能力。场景一与场景二单车道平均期望车头时距计算公式为
(10)

同理,场景三与场景四单车道平均期望车头时距为
(11)
式中:θH为HD-bus、HOV对HOV车道的选择概率,λ为非HOV在所有HD-car中的比例。
本文考虑不同种类车辆间的跟驰概率,针对不同车辆的期望车头时距加权平均,依据式(7)即可计算路段通行能力。同时,基于不同车道间的车流比例k,通过另一条车道的通行能力对本车道通行能力进行计算,两者最小值即为本车道通行能力,其表达式为
(12)

3.3 混合交通流路段平均延误
本文定义路段平均延误为每公里车辆期望通行时间与实际通行时间的差值,每种车辆的平均延误计算如式(13)所示,路段平均延误计算公式为
(13)
(14)
式中:ρi为第i种车辆在交通流中的比例或渗透率,a为车辆数量,Mi为第i种车型的总数,vf为自由流速度,vm为车辆实际行驶速度。
4 仿真实验分析
4.1 实验设计
SUMO作为当前交通仿真领域使用最广泛的仿真平台之一,其最主要的优势在于可以通过TraCI接口有效控制车辆微观驾驶行为,具有良好的在线交互功能,且包含有高度自由的配置和可移植性[16]。本文利用数值仿真与SUMO软件仿真相结合的方式,基于北京莲石东路设置不同场景,开展该部分实验仿真,在场景一与场景三中,限定了CAV空间路权,此时CAV对管理车道的选择概率为100%,在场景二与场景四中,没有限制CAV空间路权,此时CAV对管理车道的选择概率为50%。考虑了HOV的场景三与场景四,场景三中HOV对管理车道的选择概率为100%,场景四中HOV对管理车道的选择概率为50%,CAV公交与HDV公交比例之和为5%。为使传统驾驶车辆更加贴合实际,引入不完美驾驶系数,模拟不同性格驾驶员。
本文各种车辆期望车头时距取值见表1所示,仿真车辆详细参数见表2[17-21],表2中THc为HD-car期望车头时距,THb为HD-bus期望车头时距,TAc为ACC-car期望车头时距,TAb为ACC-bus期望车头时距,TCc为CACC-car期望车头时距,TCcC为前车为CACC车辆、后车为CACC-car的期望跟驰时距,TCb为CACC-bus期望车头时距,TCbC为前车为CACC车辆、后车为CACC-bus的期望跟驰时距。

表1 各种车辆期望车头时距
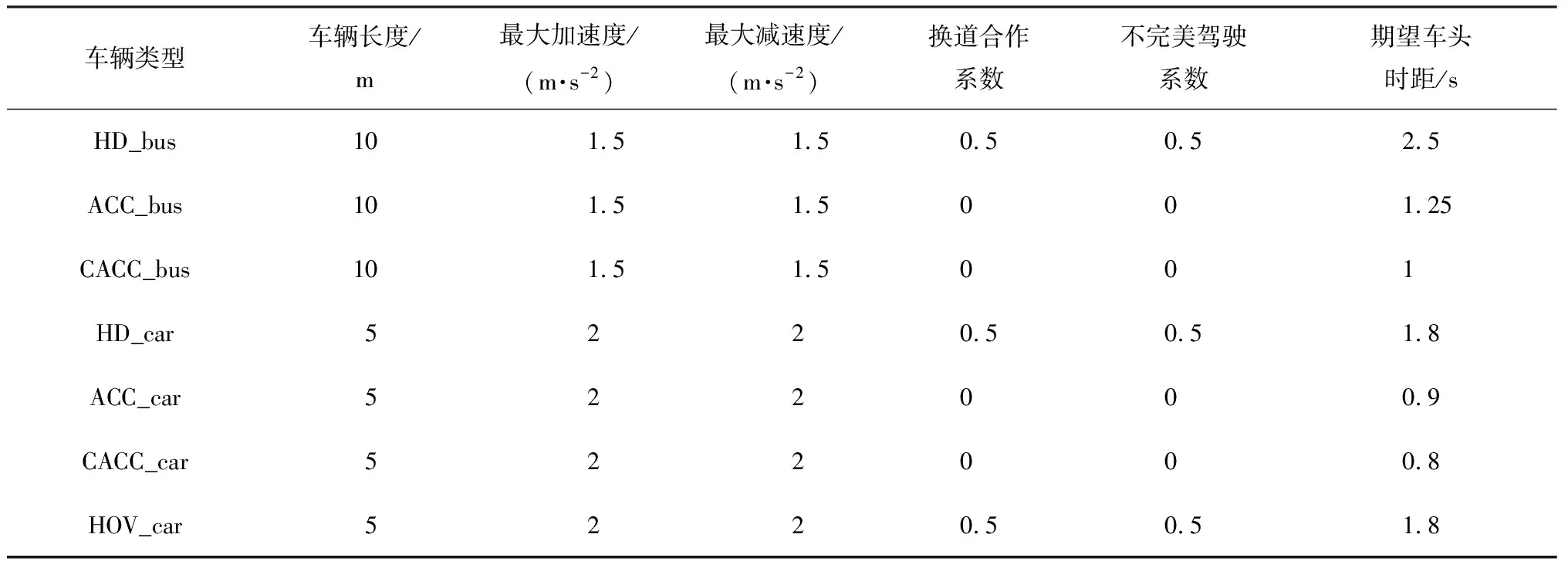
表2 仿真车辆详细参数设定
CACC系统主要基于车辆间无线通信,打破了ACC系统只能获得前车信息的局限,能够更加全面精准地获取其周边车辆信息(周边车辆也需装备CACC系统)。为使得CACC系统能够发挥作用,本文在进行混合交通流影响评估建模计算时,考虑到CACC系统的上述特性,如果在相互存在跟驰关系的两车中,后车装备有CACC系统,而前车没有装备CACC系统(即前车为人工驾驶车辆或ACC车辆),则后车CACC系统退化为ACC系统,其跟驰间距依据ACC车辆期望跟驰间距计算,如果跟驰的两车都装备了CACC系统,则期望跟驰间距依据CACC车辆的期望车头时距计算。
4.2 实验结果
4.2.1 通行能力分析
考虑CAV渗透率与ACC/CACC车辆比例,对4种场景下的通行能力进行计算,结果如图3所示。综合分析4种场景,在考虑ACC/CACC比例的前提下,当CAV渗透率低于30%时,所有场景的道路通行能力相当;当CAV渗透率在30%~80%之间时,场景一具有更高的通行能力;当CAV渗透率大于80%,则更建议使用场景二管理车道设置策略。

图3 4种场景下不同CAV渗透率与ACC/CACC车辆比例对通行能力的影响
4.2.2 路段延误仿真分析
4种场景路段延误仿真结果见图4所示,综合分析4种场景发现,在随着CAV渗透率变化的过程中,场景二平均延误较低,基本维持在10 s/km且变化十分微小。为进一步探究4种场景下路段平均延误变化规律及原因,针对不同场景下的车辆总换道次数进行分析,见图4(f)所示,发现4种场景下路段平均延误与路段车辆换道总系数具有相似的变化规律,因此推断在管理车道的设置策略下,车辆进入管理车道时的跨线换道,可能是造成路段平均延误变化的主要原因。

图4 4种场景路段延误仿真结果对比
在CAV渗透率为50%时,4种场景下ACC/CACC比例对延误的影响如图5所示。可以发现不同ACC/CACC比例对各种场景的平均延误存在一定的影响,其中,场景二与场景四下降程度较小,场景一与场景三下降程度较大。推测其主要原因是场景一与场景三限制了CAV通行空间路权,CAV只能在专用道上行驶,这使得CACC系统发挥作用的几率大幅增加,更多的CACC系统发挥作用,将意味着更低的路段平均延误。

图5 4种场景下ACC/CACC比例对平均延误的影响
4.2.3 交通流运行碰撞风险分析
车辆的频繁换道是影响交通流安全性的重要因素之一,本节选取4种场景下,当ACC/CACC、HOV比例为50%时,图6所示为CAV渗透率变化情况下车辆换道动机分布情况,图7所示为目标车道换道间隙分布情况。

图6 4种场景中CAV渗透率变化下车辆换道动机分布
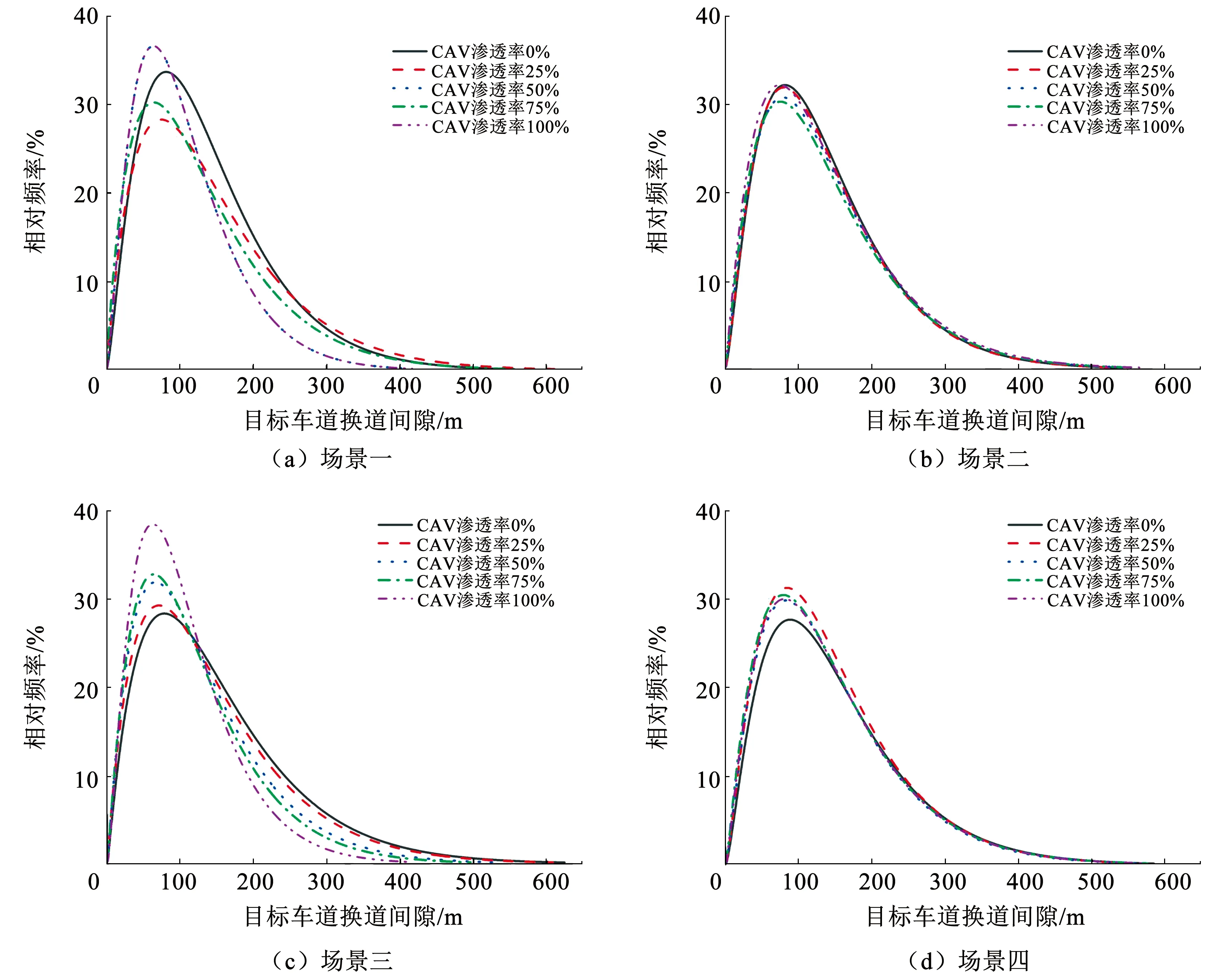
图7 4种场景下目标车道换道间隙分布情况
从图6可以看出,不同管理车道设置策略下换道动机分布具有一定差异,将场景一与场景二进行横向对比可以发现,场景二无论是从换道动机种类,还是换道频率,都要明显高于场景一,显然,场景一由于减少了不必要的换道频次,在一定程度上,道路交通流安全性得到了提高。场景三、四变化情况与场景一、二类似。
依据图7,分析4种场景下车辆换道过程中,目标车道换道间隙分布情况发现,当CAV渗透率较高时,且应用于场景一与场景三时,目标车道换道间隙大多集中于100 m以下,表现出较高的频次。在场景二与场景四中,CAV渗透率的大小对目标车道换道间隙分布影响较弱,间隙分布较为均匀,可能原因是由于在普通车道上CAV与HDV混行,HDV的存在导致CAV不能充分发挥其响应迅速的能力。
结合图6和图7可以得出结论:将CAV与HDV行驶过程进行有效的物理隔离是十分有必要的,这将会极大程度的减少整条路段上的换道次数,对交通流的平稳安全运行是有益的,此外,在面向新型混合交通流时,在针对CAV设置管理车道的条件下,较高的CAV渗透率可能将会导致路段平均碰撞风险的增加。
5 结 论
基于新型混合交通流,考虑CAV渗透率、车辆类型、交通流特性等影响因素,针对城市快速路管理车道设置策略进行研究,并通过数值与SUMO相结合的仿真模拟方式进行案例分析,得出如下主要结论:
1)综合考虑路段通行能力、路段平均延误与车辆间碰撞风险,发现当CAV渗透率低于30%或高于80%时,场景二具有较高的道路通行能力、较低的路段延误和较小的车辆间碰撞风险,当CAV渗透率介于30%~80%之间,场景一通行能力较高,但此时车辆间碰撞风险随CAV渗透率的增长而增大。此外,在设置管理车道时,如果只考虑CAV而忽视HDV、公交车等其他类型的车辆,并不能准确的反映实际情况。
2)不同管理车道设置策略对路段平均延误影响较大。整体而言,ACC/CACC比例对路段平均延误影响较小,CAV渗透率对路段平均延误具有一定影响,当CAV渗透率高于10 %时,场景三与场景四受CAV渗透率影响较大,而场景一、二受CAV渗透率影响较小。
3)CAV渗透率与不同管理车道设置策略对混合交通流运行碰撞风险都存在影响,当只为CAV或HOV设置管理车道时,随着CAV渗透率的增长会增加车辆间的碰撞风险;当只限制HDV车辆路权时,各类型换道行为与目标换道间隙频率变化并不显著,此时管理车道设置策略对交通流碰撞风险影响较小。
研究结论为新型混合交通流背景下不同管理车道设置提供一定参考,但仍存在可改进之处,未来需进一步针对CAV编队行驶的到达分布、复杂路段适用场景等方面进行研究。
