基于云RTK的无线电测向定位示准测试技术
2023-07-17唐龙
唐 龙
(桂林长海发展有限责任公司,广西 桂林 541001)
0 引 言
无线电监测设备能够实现对无线电辐射源信号的侦察、识别、测向和定位,如何快速准确地对无线电监测设备的测向定位性能进行测试和合理评估具有十分重要的意义[1]。对无线电监测设备测向定位技术指标测量,通常利用全站仪或实时动态(RTK)载波相位差分定位技术实现。全站仪通过人工辅助方式实现被测设备的方位、距离示准测量,一般是固定选择几个位置点后进行测试,并且进行多次位置挪动后会出现一定的测量误差累积,影响设备真实性能状态的评估;而且全站仪要求使用环境满足一定的能见度和通视条件等因素,不能全天候、全地域地进行示准测量,示准工作主要由人工完成,自动化程度低,调试量巨大。普通电台RTK设备的传输距离受到电台功率影响[2],考虑到无线电台体积、重量和功耗要求,普通电台传输距离一般为1~5 km左右,在一些山地、丘陵等复杂地形条件下会降低普通电台的传输距离,不能满足野外长传输距离试验要求。另外,传统无线电监测设备技术性能测试采用人工抽验方式实现,存在检测样本数量少和工作效率低的问题[3]。
针对上述问题,提出一种基于云RTK的多平台通用型测向定位示准测试系统,结合云RTK技术和小型化信号辐射源特点,充分利用移动网络和云服务器实现RTK基准站和移动站间的信息传输;通过软件自动测试技术控制示准测试系统应用平台改变方位、俯仰和距离参数,控制信号辐射源设置信号参数,快速方便地进行无线电监测设备技术性能检测。
1 云RTK工作原理及技术特点
1.1 RTK工作原理
RTK是通过实时动态处理载波相位观测值的差分定位技术,基本原理是将基准站安装在某一坐标位置点,接收卫星信号并采集基准站载波相位观测值,通过无线电台等数据通信链路实时发送给移动站;移动站接收卫星信号并采集载波相位观测值,同时通过电台接收基准站载波相位观测数据,经过解调处理得到基准站的载波相位观测值;对2个测量站的载波相位观测值进行实时差分处理,完成整周模糊度的解算,最后输出厘米级定位精度的移动站坐标位置信息[4]。
1.2 云RTK测量技术特点
云RTK测量技术是在传统RTK技术通过电台进行信息传输的基础上,充分利用移动网络实现RTK基准站和移动站间的信息传输,RTK基准站通过4G/5G网络将采集到的载波相位数据发送到云服务器,RTK移动站通过4G/5G网络将云服务器上的基准站载波相位数据接收下来,进行差分解算坐标[5]。
基于云RTK的多平台通用型测向定位示准装置主要包括北斗/GPS接收天线、通信天线、RTK基准站处理设备、RTK移动站处理设备、无线传输设备和显示控制计算机。北斗/GPS接收天线、RTK基准站处理设备、RTK移动站处理设备完成设备坐标位置的差分解算;通信天线和无线传输设备完成RTK基准设备和移动设备到云服务器的数据传输;显示控制计算机完成示准测试系统应用平台的运动控制参数设置。示准装置原理框图如图1所示。
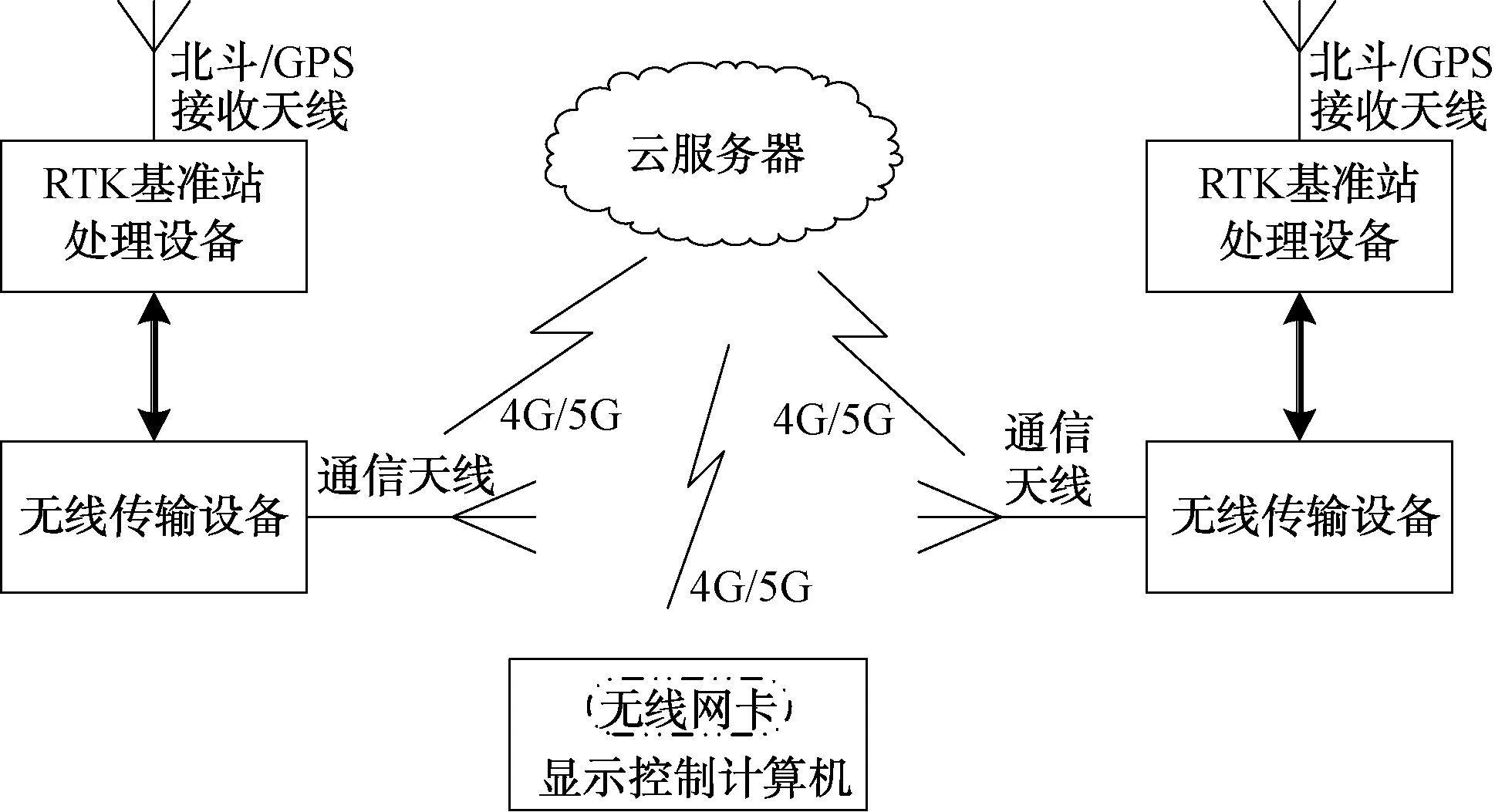
图1 基于云RTK的测向定位示准装置原理框图
云RTK测量技术使用移动网络和云服务器进行各设备间的数据交互,传输距离可以达到30~40 km左右,减少传统RTK电台因传输距离限制需要多次挪动位置测量的累积误差;降低对使用环境电磁波通视条件和光学能见度等因素限制,可以适应山地、丘陵等复杂地形条件应用,能够提供快速、全地域、全天候的高精度示准测量。
2 基于云RTK技术的测向定位示准测试系统设计与实现
2.1 测向定位示准测试系统工作原理
基于云RTK的多平台通用型测向定位示准测试系统应用场景如图2所示,可以适用于无人机载、车载和便携等平台。其中无人机载平台应用可以满足被测设备方位、俯仰和距离等参数的精确示准;车载平台应用和便携平台应用可以满足被测设备方位和距离等参数的精确示准。显示控制计算机通过软件自动测试技术控制示准测试系统应用平台改变方位、俯仰和距离参数,按照需求控制信号辐射源设置信号参数,实时读取无线电监测设备的工作状态和方位、俯仰和距离测量参数,对被测设备进行技术性能评估判断,工作效率高,准确性好。

图2 基于云RTK的测向定位示准测试应用场景
2.2 常用坐标系及RTK测向定位结果解算
确定地面上某观察点相对于地球的位置信息是卫星导航和遥测定位计算中的基本任务,通常需要建立合理的坐标系,以便准确地描述被测点与观察点的几何位置关系和坐标位置信息[6]。
2.2.1 常用地球坐标系介绍
在大地坐标系中,空间某观测点P的大地坐标位置信息P(B,L,H)主要用纬度B、经度L、高程H表示。大地纬度B表示赤道面与观测点P处参考椭球法线PO的夹角;大地经度L表示参考椭球起始子午面NGS与观测点P和参考椭球自转轴所在面NPS之间的夹角;大地高程H是观测点P沿该点法线到椭球面的距离;原心O表示Z轴与观测点P沿地球椭球表面的法线方向延长线的相交点。大地坐标系如图3所示。
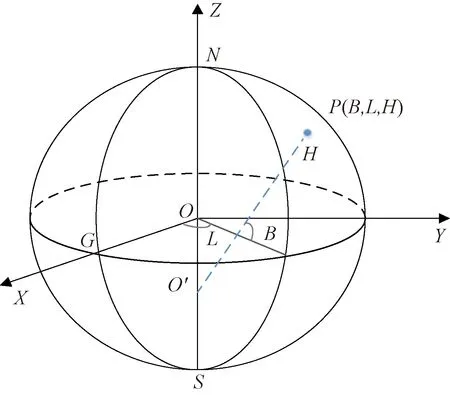
图3 大地坐标系
在空间直角坐标系中,空间中某观测点P的坐标位置信息P(x,y,z)主要用该观测点投影在X轴、Y轴、Z轴上的长度来表示。X轴正向指向赤道与本初子午面的交点G;Y轴按照右手坐标系均与Z轴和X轴的夹角呈90°;Z轴正向指向地球椭球的北极点N;原心O表示地球椭球的中心。空间直角坐标系如图4所示。
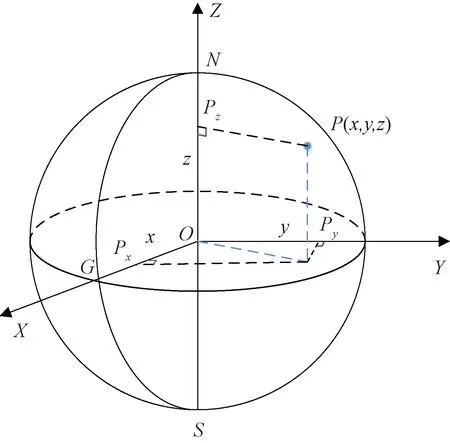
图4 空间直角坐标系
在东北天坐标系中,空间中某观测点P的坐标位置信息P(E,N,U)主要用东向E、北向N、天向U来表示。x轴(东向E)与地球长半轴重合;y轴(北向N)与地球短半轴重合;z轴(天向U)与地球法线重合,向上为正;原点O表示以站心(如北斗/GPS接收天线中心)为坐标系中心,主要用于测量以观察者为中心的其他物体坐标位置信息和运动规律,东北天坐标系如图5所示。
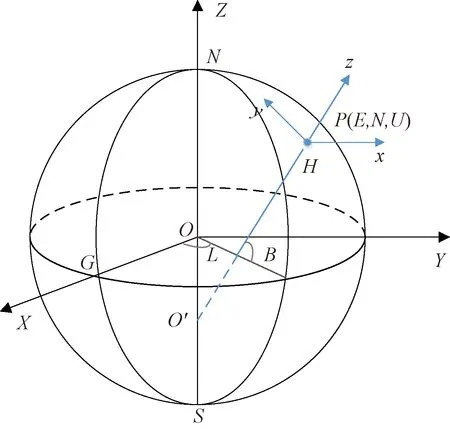
图5 东北天坐标系
2.2.2 RTK测向定位结果解算算法
在卫星导航和遥测定位计算中,需要对空间中同一观测点在不同坐标系之间的位置信息进行坐标转换,坐标转换的精度直接决定着目标定位的准确性和精度。根据常用坐标系的几何位置关系,空间直角坐标系、大地坐标系和东北天坐标系之间的坐标转换计算过程主要包括以下步骤[7]。
首先,根据大地坐标系和空间直角坐标系之间的几何位置关系,需要将RTK基准站记录的大地坐标位置信息(纬度Bz,经度Lz,高程Hz)转换为空间直角坐标信息(xz,yz,zz),转换数学关系式为:
(1)
将RTK移动站记录的大地坐标位置信息 (纬度Bc,经度Lc,高程Hc)转化为空间直角坐标信息(xc,yc,zc),转换数学关系式为:
(2)

然后,将RTK移动站由空间直角坐标系转换为以RTK基准站为原点的东北天坐标信息(E,N,U),转换数学关系式为:
(3)
最后,根据东北天坐标信息(E,N,U)计算RTK基准站与移动站之间的距离R、方位角A和俯仰角E,获得设置的距离、方位和俯仰等示准参数。计算数学关系式为:
(4)
A=arctan(E/N)
(5)
(6)
2.3 测向定位设备示准及自动测试技术
无线电监测设备测向定位性能是设备主要功能,如何快速、方便地对无线电监测设备进行性能测试和合理评估是需要重点考虑的问题。文献[1]介绍了一种适用于机载电子侦察设备的自动测试系统,但是需要通过伺服转台转动角度才能对电子侦察设备的测向能力进行定量分析。针对部分固定站无线电监测设备无伺服转动功能或者信号辐射源位置远距离变化的问题,测向定位示准测试系统将云RTK技术与自动测试技术相结合,利用示准测试系统应用平台完成测试所需的方位、俯仰和距离参数示准,接收被测设备上报测量参数并进行数据分析和性能评估。测向定位示准测试系统工作流程如图6所示。
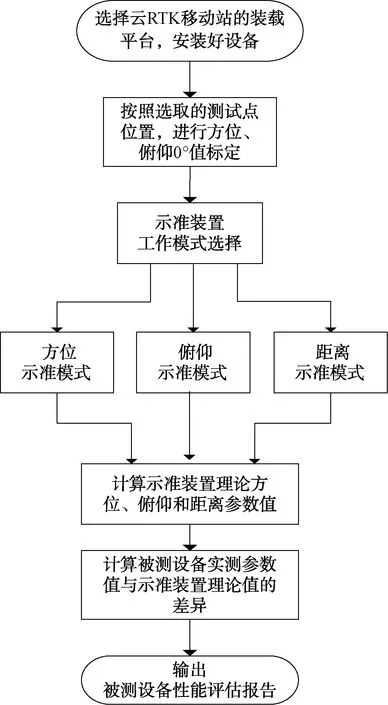
图6 测向定位示准测试流程框图
(1) 选择云RTK移动站的应用平台,安装好测向定位示准测试系统和被测无线电监测设备;
(2) 按照选取的测试点位置,进行被测无线电监测设备方位、俯仰面的零值(0°)标定;
(3) 根据指令,选择示准测试系统工作模式,主要包括方位示准模式、俯仰示准模式和距离示准模式;
(4) 通过记录的被测无线电监测设备位置坐标和RTK移动站的实时位置坐标,计算出测向定位示准测试系统理论方位、俯仰和距离参数值;
(5) 将被测无线电监测设备实际测试方位、俯仰和距离参数值送到显示控制计算机,通过软件自动测试系统计算出设备实测值与示准测试系统理论值的差异,输出性能评估报告。
3 系统示准测试流程及数据处理
3.1 零值标定流程
(1) 通过云服务器配套应用软件,设置好相关网络系统端口参数,选择使用的SIM卡对应运营商接入点名称,实现RTK设备、测向定位示准测试系统和显示控制计算机的移动互联;
(2) 通过被测无线电监测设备的正北角值和方位机械0°位置,结合云RTK设备进行方位面的0°值标定;
(3) 通过被测无线电监测设备的正北角值和俯仰机械0°位置,结合云RTK设备进行俯仰面的0°值标定。
3.2 示准模式工作流程
示准测试系统工作模式主要包括方位示准模式、俯仰示准模式和距离示准模式,示准模式主要工作流程如下:
(1) 根据测试示准参数需求,分时选择对应的工作模式为方位/俯仰/距离示准模式;
(2) 分时设置下发测量的方位/俯仰/距离示准范围、驻留时间等参数;
(3) 分时制定方位/俯仰/距离示准测量计划,主要设置参数包含方位/俯仰/距离起止范围、方位/俯仰/距离步进、方位/俯仰/距离驻留时间等;
(4) 制定信号辐射源测量计划,主要设置参数包含信号辐射源起止频率、频率扫描步进、频率驻留时间等;
(5) 分时控制应用平台按照方位/俯仰/距离示准设置路线进行运动,信号辐射源按照信号源设置参数通过辐射天线发射信号;
(6) 被测无线电监测设备接收辐射源信号,分时测量并记录信号频率、方位/俯仰/距离参数值。
3.3 数据处理
根据被测无线电监测设备上报的侦测结果参数,自动测试系统按照设备设计技术指标要求自动完成被测设备的数据分析和性能判定,输出性能评估报告。计算被测设备性能参数理论值与实测值的误差方法主要包括:
(1) 示准测试系统理论方位值为θA,被测设备方位实测值为θAT,方位选取点为M个,每个方位点选取频率点为N个,则被测设备方位测量误差为:
(7)
(2) 示准测试系统理论俯仰值为θE,被测设备俯仰实测值为θET,俯仰选取点为M个,每个俯仰点选取频率点为N个,则被测设备俯仰测量误差为:
(8)
(3) 示准测试系统理论距离值为D,被测设备俯仰实测值为DT,距离选取点为M个,每个距离点选取频率点为N个,则被测设备距离测量误差为:
(9)
4 结束语
通过结合云RTK技术和小型化信号辐射源特点,充分利用4G/5G移动网络和云服务器进行云RTK设备和测向定位示准测试系统等设备间的数据交互,可以快速、方便地进行示准参数的设置,解决传统方位、俯仰和距离基准测量技术调试工作量大和使用环境限制的问题;通过软件自动测试技术根据测试需求控制示准测试系统应用平台设置示准参数,实时读取无线电监测设备的工作状态和方位、俯仰和距离测量参数,被测设备技术性能检测样本数量多,自动化程度高,测试准确性好,能够满足车载、机载、便携等多型平台的示准测试应用。
