基于领航跟随者的固定时间车辆编队控制
2023-07-17张意豪叶洪涛罗文广文家燕
张意豪 叶洪涛 罗文广 文家燕
摘 要:随着无人车技术的发展,对控制的要求更高,对系统收敛的时间也有一定的要求。为了解决传统多车辆协同编队控制系统无法预测系统收敛时间的问题,提出一种固定时间控制的车辆编队控制策略。首先,采用领航者-跟随者模式建立了领航车与跟随车之间的误差模型,将跟随车跟随领航车之间的跟踪问题转化为误差系统的控制问题;其次,根据固定时间理论来设计跟随车的线速度控制器和角速度控制器,使编队系统的跟踪误差在一定时间内趋于0,保证车辆编队能在一个固定时间内收敛并稳步形成所期望的编队队形;然后,把车辆编队系统分为位置误差系统和角度误差系统,运用李雅普诺夫稳定性理论分别证明位置误差系统和角度误差系统的稳定性,并推导出位置误差系统收敛时间的最上界;最后,通过MATLAB软件仿真,验证所提出的固定时间编队控制器的有效性。仿真结果表明,所提出的方法可以保证车辆编队误差系统在固定时间内收敛,形成期望编队阵型,且系统收敛时间与系统初始状态无关。
关键词:车辆编队;协同控制;固定时间;编队控制;领航跟随法
中图分类号:TP273;U463.675 DOI:10.16375/j.cnki.cn45-1395/t.2023.03.010
0 引言
隨着汽车联网技术的发展,智能无人车为许多行业提供了诸多便利和更多的选择方案,例如军用无人探测智能车编队和快递行业的智能卡车编队等[1]。最早是以多智能体为对象研究编队系统,研究多智能体编队系统的相关理论较为成熟,而智能车作为多智能体的延伸之一,研究车辆编队控制问题可以借鉴多智能体编队控制策略。目前,车辆编队控制方法主要有领航-跟随法、虚拟结构法、行为控制法、人工势场法等[2-5]。领航-跟随法是目前最为成熟的编队控制方法[6-10],该方法的优点是简化了多智能体系统的控制复杂度,层级明确,扩展性好。而有关车辆建模的研究方法主要有2种,一种是基于领航跟随者模式的车辆误差模型[11],另一种是以车辆运动学与动力学为基础的数学模型[12]。
在编队控制中,为了得到较好的响应特性和收敛速度,Oh等[13]通过运用渐进收敛算法来提高系统的性能,但使用该算法时不可预测系统的收敛时间。因此,引入有限时间收敛算法和固定时间收敛算法,这2种时间算法与通常意义下的算法截然不同,注重研究的是系统稳定收敛时间,可以通过一些条件提前计算出系统达到稳定时的收敛时间。Polyakov[14]提出了系统收敛到平衡状态的时间与初始条件无关的固定时间控制,并且给出了固定时间稳定理论的定义和计算收敛时间上界的公式。之后,开始有学者将固定时间理论应用于编队控制。Guo等[15]针对轮式移动机器人的固定时间轨迹跟踪控制问题,设计了固定时间自适应轨迹跟踪控制律,使实际系统能够在固定时间内跟踪上参考轨迹。郭戈等[16]将有限时间算法应用于车辆编队,提出一种考虑预设瞬态性能和稳态性能约束的有限时间车辆编队控制方法,解决了车辆编队能提前预知系统稳定时间的问题,但这个稳定时间与系统初始状态有关。
以上有关领航跟随者模式车辆编队控制的研究集中在解决编队形成及编队快速稳定的问题,而对提前预知系统收敛时间方面的研究成果较少,且研究不够深入。在现实中,车辆编队在进行某些特定任务时,如果可以提前计算出编队系统从初始化到编队稳定形成所需的时间,且该时间不受系统初始状态的影响,那么在制定特定任务时有较强的指导作用。基于此,本文将领航跟随者模式的车辆误差模型与固定时间相结合,提出基于固定时间理论的车辆编队控制。采用领航跟随法建立车辆误差模型,根据固定时间理论设计相应的系统控制器,实现编队的快速形成,收敛速度更快,且可以提前计算出系统收敛时间。与现有研究不同的是,本文采用领航跟随方式将车辆编队问题转化为跟随车跟随领航车之间的特定误差系统的控制问题,并使用距离误差函数建立数学模型;然后,基于建立的误差模型,使用固定时间理论与李雅普诺夫函数设计出跟随车的线速度和角速度控制器,将误差模型分为2个系统,分别证明了系统的稳定性和渐进收敛性;最后,使用软件对所设计的控制器进行仿真验证。
1 模型建立与预备知识
1.1 模型建立
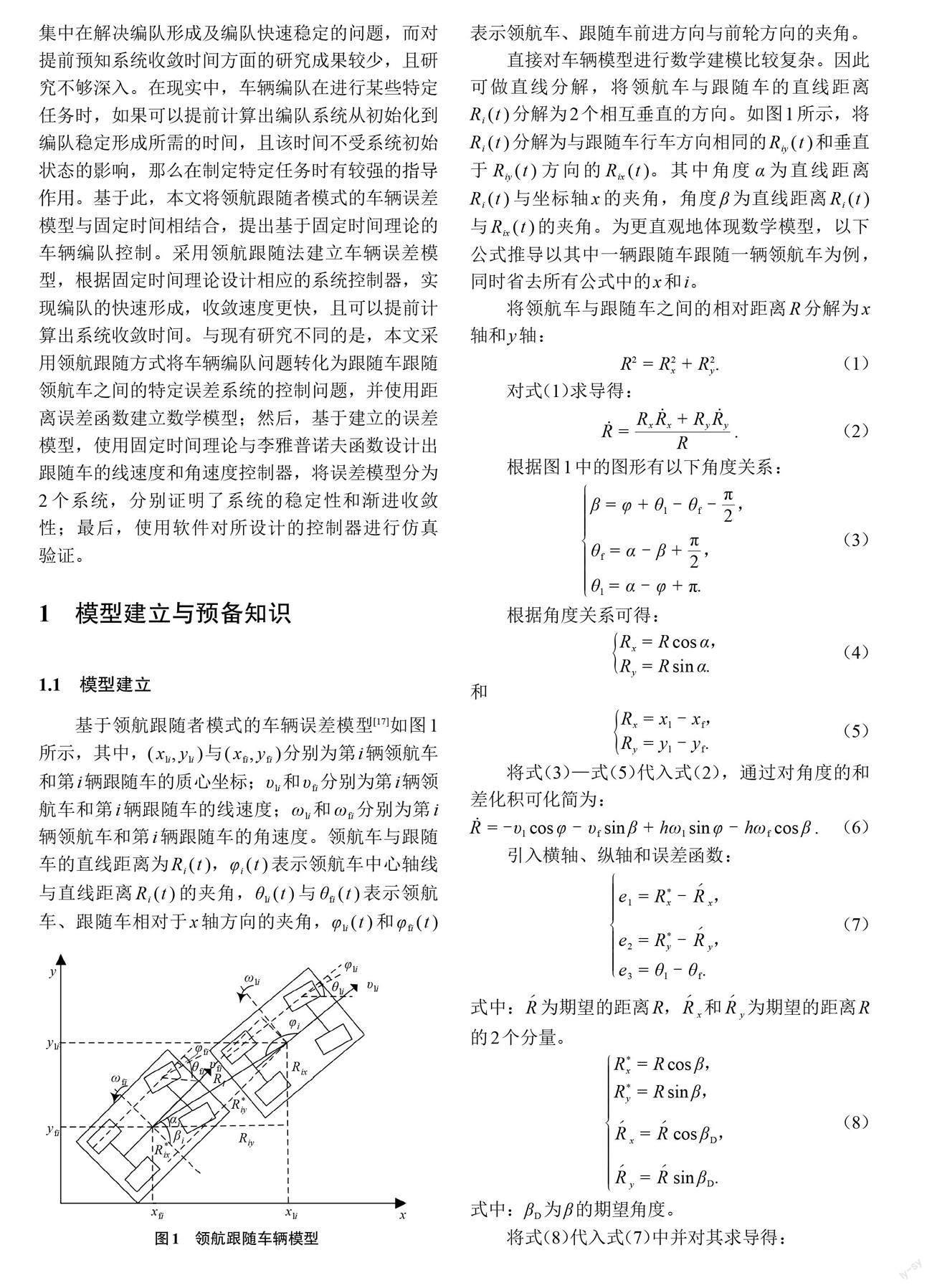
基于领航跟随者模式的车辆误差模型[17]如图1所示,其中,[(xli, yli)]与[(xfi, yfi)]分别为第[i]辆领航车和第[i]辆跟随车的质心坐标;[υli]和[υfi]分别为第[i]辆领航车和第[i]辆跟随车的线速度;[ωli]和[ωfi]分别为第[i]辆领航车和第[i]辆跟随车的角速度。领航车与跟随车的直线距离为[Ri(t)],[φi(t)]表示领航车中心轴线与直线距离[Ri(t)]的夹角,[θli(t)]与[θfi(t)]表示领航车、跟随车相对于[x]轴方向的夹角,[φli(t)]和[φfi(t)]表示领航车、跟随车前进方向与前轮方向的夹角。
直接对车辆模型进行数学建模比较复杂。因此可做直线分解,将领航车与跟随车的直线距离[Ri(t)]分解为2个相互垂直的方向。如图1所示,将[Ri(t)]分解为与跟随车行车方向相同的[Riy(t)]和垂直于[Riy(t)]方向的[Rix(t)]。其中角度[α]为直线距离[Ri(t)]与坐标轴[x]的夹角,角度[β]为直线距离[Ri(t)]与[Rix(t)]的夹角。为更直观地体现数学模型,以下公式推导以其中一辆跟随车跟随一辆领航车为例,同时省去所有公式中的[x]和[i]。
3 仿真分析
本节在MATLAB软件中对多车辆进行编程仿真以验证所设计的控制器的有效性。仿真使用的MATLAB版本为2021B,笔记本电脑的相关参数为:Intel(R) Core(TM) i5-4200H CPU @ 2.80GHz系统处理器。
考虑含有5辆跟随车和一辆领航车组成的编队系统,设置每辆车的车身长度h=2.00 m,领航车的角速度为0,线速度以1.22 m/s做加速运动,系统仿真时间为10 s。设置的跟随车的控制器参数(k、α、β)如表1所示。
圖2和图3分别为每辆跟随车与领航车之间的横轴误差([e1])和纵轴误差([e2])的变化曲线。由图2和图3可以看出,仿真时间在3 s内,系统的横、纵轴误差快速收敛到0,可认为在车辆编队中的每辆跟随车的横轴和纵轴都平稳地行驶在预定的轨迹中,因此验证了所设计控制器(20)可以使编队系统在一个提前预知的固定时间范围内收敛,实现编队控制目标。每辆跟随车与领航车之间的角度误差([e3])曲线图如图4所示,每辆跟随车的航向角虽有翻转,但最终都在3 s内收敛到0,可认为系统在稳定后,跟随车的航向角与领航车的航向角趋于一致。图5和图6分别为5辆跟随车和1辆领航车的线速度和角速度的变化曲线。由图5和图6可知,在固定时间控制算法的作用下,每辆跟随车的线速度和角速度在3 s内稳定跟踪到领航车的线速度和角速度。由图7可知,车辆编队在仿真时间为10 s内由初始位置到完成预期的编队队形的过程较为稳定,呈正五角图。从所有的仿真图来看,系统达到稳定状态的时间不超过3 s。通过以上相关参数,根据式(28)可以计算出系统最小收敛时间为[4.38] s,小于系统仿真收敛时间,从而验证了定理1中的结论,证明了算法的有效性。
4 结论
由于传统的车辆编队控制具有无法预知系统收敛时间的局限性,本文提出一种基于固定时间理论的车辆编队控制算法,使系统收敛时间更短,并且可以提前计算出收敛时间,且不受系统初始状态的影响。首先采用领航跟随者方法建立起车辆误差模型,根据固定时间理论设计相应的系统控制器,然后运用经典控制理论知识与数学知识证明了系统的稳定性,同时推导出系统收敛时间的最小下界。有限时间理论的车辆编队控制也可以提前推算出系统收敛时间,但其收敛时间不仅与系统参数有关,还与系统初始值有关,而本文的基于固定时间理论的车辆编队控制算法不仅可以提前计算出收敛时间,且不受系统初始状态的影响。本文未设置对照组与有限时间理论相比较,无法体现固定时间理论的优越性,故今后将进一步深入研究。
参考文献
[1] 田大新,黄米琪,李嘉炜,等. 车辆编队的队形控制方法及应用综述[J]. 移动通信,2020,44(11): 52-57.
[2] ZHANG Y M,MEHRJERD H. A survey on multiple unmanned vehicles formation control and coordination:normal and fault situations[C]//Proceedings of the 2013 International Conference on Unmanned Aircraft Systems. USA:IEEE,2013:1087-1096.
[3] DESAI J P,OSTROWSKI J P,KUMAR V. Modeling and control of formations of nonholonomic mobile robots[J]. IEEE Transactions on Robotics and Automation,2001,17(6):905-908.
[4] 杨建平,胡江平,吕维. 基于事件触发机制的智能车编队控制[J]. 控制工程,2019,26(3):393-397.
[5] 张海江,文家燕,谢广明,等. 饱和约束下事件触发多智能体系统量化通信环形编队控制[J].广西科技大学学报,2022,33(4):44-50,69.
[6] 胡勇超. 基于移动闭塞-领航跟随法无人车跟随控制研究[D]. 北京:北京交通大学,2021.
[7] 李咏华,张立,刘嘉睿,等. 领航-跟随型多移动小车滑模编队控制[J].重庆理工大学学报(自然科学版),2022,36(7):18-27.
[8] 王树凤,张钧鑫,张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J].上海交通大学学报,2020,54(3):305-311.
[9] 黄健飞,马彦. 基于跟随领航者的车辆自适应编队控制[J].吉林大学学报(信息科学版),2019,37(3):253-259.
[10] LI R M,ZHANG L W,HAN L,et al. Multiple vehicle formation control based on robust adaptive control algorithm[J].IEEE Intelligent Transportation Systems Magazine,2017,9(2):41-51.
[11] 俞志英,郭戈,钱方. 新的基于反馈线性化的车辆编队控制[J]. 大连海事大学学报,2013,39(1):123-127.
[12] 李广南,叶洪涛,罗文广. 基于IPSO-MPC的无人驾驶车辆纵向运动控制[J].广西科技大学学报,2022,33(1):94-100,109.
[13] OH K K,PARK M C,AHN H S. A survey of multi-agent formation control[J].Automatica,2015,53:424-440.
[14] POLYAKOV A. Nonlinear feedback design for fixed- time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control,2012,57(8):2106-2110.
[15] GUO P F,LIANG Z Y,WANG X,et al. Adaptive trajectory tracking of wheeled mobile robot based on fixed-time convergence with uncalibrated camera parameters[J]. ISA Transactions,2020,99:1-8.
[16] 郭戈,张茜,高振宇. 具有预设瞬稳态性能的有限时间智能车辆固定构型编队控制[J].中国公路学报,2022,35(3):28-42.
[17] 李润梅,张立威,王剑. 基于时变间距和相对角度的无人车跟随控制方法研究[J].自动化学报,2018,44(11):2031-2040.
[18] SHAO J,XIE G,WANG L. Leader-following formation control of multiple mobile vehicles[J]. IET Control Theory and Applications,2007,1(2):545-552.
[19] YU S H,YU X H,SHIRINZADEH B,et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica,2005,41(11):1957-1964.
[20] 刘伟. Jensen不等式的几个推论及其应用[J].吉林建筑工程学院学报,1994,1(1):19-23.
Fixed-time vehicle formation control based on leader-follower
ZHANG Yihao1, YE Hongtao*1, 2, 3, LUO Wenguang3, WEN Jiayan3
(1.School of Automation, Guangxi University of Science and Technology, Liuzhou 545616, China; 2. Guangxi Key Laboratory of Automatic Detecting Technology and Instruments(Guilin University of Electronic Technology), Guilin 541004, China; 3. Guangxi Key Laboratory of Automobile Components and Vehicle Technology(Guangxi University of Science and Technology), Liuzhou 545616, China)
Abstract: To solve the problem that the traditional multi-vehicle cooperative formation control system cannot predict the convergence time of the system, a vehicle formation control strategy with fixed time control is proposed. Firstly, the error model between the lead vehicle and the following vehicle is established by using the leader-follower mode, and the tracking problem between the following vehicle and lead vehicle is transformed into the control problem of the error system. Secondly, the linear velocity controller and angular velocity controller are designed according to the fixed time theory, so that the tracking error of the formation system tends to 0 in a certain period of time, and the vehicle formation can converge in a fixed time and form the desired formation steadily. Then, the vehicle formation system is divided into position error system and angle error system. The stability of position error system and angle error system is proved respectively by using Lyapunov stability theory, and the uppermost limit of the convergence time of position error system is derived. Finally, the effectiveness of the proposed fixed-time formation controller is verified by MATLAB software simulation. The simulation results show that the proposed method can ensure that the vehicle formation error system converges within a fixed time to form the desired formation, and the convergence time is independent of the initial state of the system.
Key words: vehicle formation; cooperative control; fixed time; formation control; leader-follower method
(責任编辑:罗小芬)
