窄长型电动汽车中具有车身侧倾车辆的研究现状
2023-07-13吴子轩杨敏刘鹏
吴子轩 杨敏 刘鹏


摘 要:如今,交通拥挤是全世界一个日益严重的问题。为了解决交通拥堵,出行需求与道路资源之间的矛盾,可供单人或双人驾乘的窄长型电动汽车ENV(Enclosed Narrow Vehicle)逐渐出现。本文通过对国内外近年来国内外ENV以及ENV中具有车身倾斜功能的 NTV (Narrow Titled Vehicle)车型的特点。通过总结比较了ENV的各特点得出目前ENV中NTV的发展现状研究。
关键词:ENV NTV 转向结构
1 窄长型车辆产生的背景
近年来,随着汽车数量的增加。为了解决交通拥堵等问题,提出了通过结合传统汽车和两轮车的好处,针对个人流动性的汽车市场的概念,从而提出了占地面积小、质量轻的狭窄城市车辆即ENV。减少的尺寸节省了生产成本,更有效地利用现有的道路基础设施。总质量减少也有助于提高燃油效率和减少污染,这使其在新兴汽车共享项目中具有竞争优势。
1.1 窄长型车辆的分类
按车轮数量分类可以分为三轮、四轮。
三轮形式按车轮布置又可以分为前2轮后1轮或前1轮后2轮,三轮汽车往往都比较小巧,具有很高的灵活性,具有自身独特的优势。
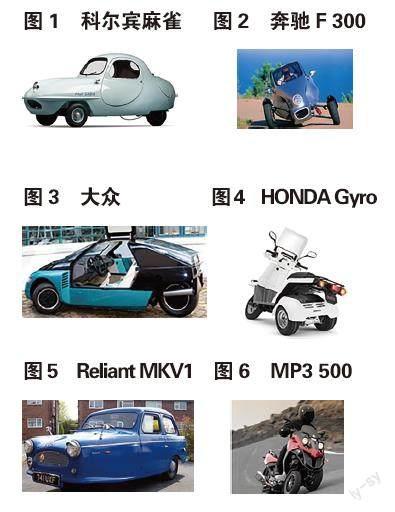
历史上三轮ENV车型较为成功的包括科尔宾麻雀Bip2000(图1),梅赛德斯奔驰 F 300(图2),大众公司的踏板车(图3),日本HONDA公司的Gyro(图4),Reliant Motor Company的Reliant MKV1(图5),意大利比亚乔的MP3 500(图6),雕刻家一号Bip2000(图7),丰田的i-Road(图8)等;其中 Gyro(图4),Reliant MKV1(图5)雕刻家一号Bip2000(图7)都采用的是前一轮后两轮的布置形式,其余采用的都是前两轮后一轮的布置形式。
四轮车辆分为普通四轮车和菱形四轮车,拥有更好的的行驶稳定性和低速稳定性,不需要人为的去控制平衡。
普通四轮车有:雷诺twizy(图9),Nissan Land Glider Concept(图10),奥迪Urban(图11)等。雷诺twizy搭载了一台17马力的电动机,最高车速80km/h。研发人员考虑到车辆在弯道中可能会出现侧翻,将悬架调校的很硬,同时采用了略宽于前轮的后轮[1]。Nissan Land Glider Concept在2009年的東京车展上亮相,车型小巧灵活,容易驾驶、零排放零污染,是一款非常适合穿梭于都市之间的环保交通工具[2]。2011法兰克福车展上,奥迪Urban概念车是针对日益拥挤的都市交通开发的“1+1”双座超级轻量化概念车。此款车型采用电动机驱动,最大功率20马力,最大扭矩47Nm,最高时速为100km/h。这款车满电量续航里程为70km,20分钟即可将电池充满[3]。
钟志华院士团队提出了车轮菱形布置的新概念车(简称菱形车)。菱形四轮车有别于传统汽车的前后轮的布置方式,设置了3个轮轴,前后各布置1个车轮,中间轮轴布置2个车轮, 采用菱形的底盘和车身设计,整车的安全性、机动性、燃油经济性方面都有明显的改善[4]。
窄长型车根据其车身和座舱形式又可以分为封闭式车身和非封闭式车身。封闭式车身可以更好的保护驾乘人员、满足全天候的出行需求;非封闭式车身具有方便驾乘人员上下车、有用更好的视野的特点;
窄长型车根据其底盘结构可以分为单纵梁类型的摩托车车架结构和承载式车身结构。绝大部分非封闭式车身的车都采用的是摩托车单纵梁底盘结构。封闭式车身多采用承载式车身结构。摩托车单纵梁结构相比承载式车身结构让车拥有了更高的强度,但同时降低了对驾乘人员的保护,只有承载式车身才能全方位的保护驾乘人员。
1.2 窄长型车辆发展存在的问题
通过对上述窄长型车辆不同结构形式的比较分析,不难发现窄长型车作为环节交通拥挤和节约能源的车辆类型,在未来交通中将承担越来越重要的角色,但是目前窄长型车辆形式多样,也存在一些发展的问题。1)窄长型车辆的分类界限模糊,作为满足个人出行的交通工具,在结构形式和安全性方面受到车辆成本和使用者对其需求的不同而形成多种多样的结构类型,不同结构类型的分类在不同国家区分的标准不尽相同,甚至在很多国家并不能符合机动车行驶的标准。这种模糊的区分界限将限制其大批量生产和使用,也就制约了其发展。2)窄长型车辆来源于传统的两轮车辆,为了解决其稳定性增加了车轮数量,因此在结构和用途上仍然趋向于两轮车辆的使用范畴。随着整车质量的增加,窄长型车的机动性也随之下降,例如车辆的转向半径随着轴距的增加而增加,窄长型车辆面临的需求将是能够保持自身稳定的前提下,尽量减小转向半径,甚至实现原地转向。3)窄长型车载解决稳定性和机动性的前提下,其舒适性也将成为车辆发展的趋势。封闭式车身和承载式车身更能满足人们全天侯出行需求,在这一类车型中由于驾乘人员得到保护,车辆行驶特性上将通过借鉴两轮车辆的侧倾实现行驶和转向工况下的稳定性,这就出现了车身侧倾的窄长型车辆,未来这样的窄长型车结合新能源技术和车辆自动驾驶控制技术的发展将成为人们出行智能化工具。
2 窄长型车辆中具有车身侧倾车辆
2.1 车身侧倾车辆的发展
介于封闭式车身以及传统的车辆系统布局存在设计冲突,所导致的早期的ENV车型的驾驶稳定性较差,窄长的车辆在转弯时更容易侧翻,曾经出现了几种解决方法。
1)低速和慢速法——根据宽度的减小降低车辆高度并限制最高速度和转弯速度,这在现代交通时不切实际的。如图13中的Messerschmidt。
2)摩托车法——骑摩托车时,骑手可以很容易的利用身体重心控制车辆。然而,在困难的道路情况下(湿滑的道路等),需要更好的驾驶技巧,才能防止车辆失控。封闭式摩托车则需要更好的驾驶技巧,还需要有低速和停车的支撑轮。这也不是很好的解决方法。如图14的Lean Mechine。
3)倾斜3或4轮车方法——为了补偿横向稳定性,车辆具有某种倾斜系统,使其能够像摩托车一样倾斜。但这种类型的车辆很难由普通人安全的驾驶,这使其不能大规模生产,对于驾驶人的技术水平有较高的要求,受众人群局限。如图15中的eco-mobile。
最终,我们发现车身侧倾方案可以解决车辆行驶过程中容易倾倒侧翻的问题,同时可以满足车辆在高速行驶状态下的稳定性。具有车身倾斜功能的NTV(Narrow Titled Vehicle)出现是窄长型车辆发展的重要方向。
2.2 NTV的倾斜方式
NTV 车辆可以实现多种形式的车身倾斜,可分为主动倾斜和被动倾斜两种。主动倾斜由车载计算机计算和处理,在转弯过程中根据驾驶员转向角度和车速调整车身倾斜角度,使车辆始终处于最佳平衡状态。被动倾斜是指由车体本身的惯性和人为对车辆平衡进行调整。
2.3 NTV的倾斜控制
转向控制倾斜STC(Steering Tilt Control),即转向倾斜控制由驱动装置实现车身的倾斜,该系统对于驱动装置的要求较高,在驾驶时对于道路的判断执行力强于驾驶者[5]。
直接倾斜控制DTC(Direct Tilt Control),即由驾驶人员改变自身的驾驶姿态控制车身倾斜,该系统在使用过程中,主要依靠驾驶员的肢体动作完成对于车辆的操控,在低速行驶时,可能会存在转向不足的情况。
由于NTV车辆的设计特性,单一的倾斜控制已经无法满足于日常出行对于车辆的全工况运行要求。因此目前行业内的主流研究方向设计是将转向倾斜控制DTC与直接倾斜控制STC混合使用。在低速时,DTC的使用优势强于STC,但是在高速状态下STC对于车身的控制性强于DTC。使用这种方法,设计人员必须解决几个问题,例如,从 STC 到 DTC 策略的切换不应发生在反向转向操作期间。此外,STC和DTC策略会导致静态误差,如果在恒定半径弯曲期间发生DTC/STC切换,则会出现不连续状况。为了避免上述等问题的出现。NTV车型的开发,性能的优化与DTC和STC系统的配合密切相关。目前也由很多国内外团队正在进行相应的开发[6]。
2.4 NTV车型设计
目前市面上主流的NTV车型的设计主要分为三种,分别如下:
1)车身倾斜式正三轮。典型代表就是HONDA Gyro(图16)。采用前面一个转向车轮、后面两个宽面车轮的布置方案[7]。采用直接倾斜控制 DTC,摆动机构可以减少后轮的浮动,通过配备差速齿轮,以调整后轮在转弯时产生的转速差,表现出优异的行驶稳定性。
2)前轮倾斜,前轮转向式倒三轮。[8]这种车型采用直接倾斜控制DTC。通过前轮双轮倾斜转向,后轮仅仅作为驱动轮使用,提高了车辆的稳定性。典型代表是逗哈 itan(图17)。
3)前轮倾斜,后轮转向式倒三轮。采用转向控制倾斜STC,通过前轮双轮倾斜,后轮转向的方式,车载计算机根据转向角计算给出合适的前轮倾斜角,后轮转向角,最大程度上保证了车辆的安全与稳定。该车型采用封闭式座舱,满足人们在全天候的使用需求。如丰田 i-Road(图18)。
2.5 NTV的动力类型
2.5.1 采用内燃机的车型
内燃机在NTV车型中也有着广泛的使用。
1)宝马的Carver為燃油发动机,它配备660 cc 4缸发动机,带有涡轮增压中冷器,最大马力为65bhp,最大扭矩为100N·m。前轮略大于后轮。Carver One的最高时速为185公里/小时。
2)目前市面上主流的倒三轮摩托车雅马哈。雅马哈 Tricity300采用水冷四冲程单缸SOHC4气门发动机,排量为292cc,最大马力20.6kW(28ps)/7250rpm,最大扭矩为29Nm(2.9kg-m)/5750rpm。
2.5.2 采用电动机的车型
科尔宾汽车的麻雀车型是较早使用电机作为驱动器的车型。该车型极速可达80km/h,续航里程在65英里左右,采用了一种低成本的锂电池系统。雪铁龙发布了一款3轮概念车,名为Liion。该车辆由锂离子电池驱动的电动机提供动力,该电动机驱动单个后轮。丰田公司推出的i-Road搭载2Kw的电动机,单次充电可以续航31英里,最高时速约60km/h。
2.5.3 对比和总结
与电动机相比内燃机就显得十分笨重。电动机可以产生更大的功率和扭矩输出。电动机产生的废热远远低于内燃机。内燃机还需要复杂传动结构等。但内燃机可以很快完成能源补给,而电动机能源补给时间相对较长。在能量密度方面,锂电池的能量密度远不及汽油。电动机存在电池组发热问题,燃油车则不需过多考虑相关问题。由于电动车电池组位置低,能提高车辆的稳定性,使车辆整体稳定性得到提高。电机通过电调,可以实时控制牵引力,内燃机响应速度没有电机快。
随着电能源技术的发展,结合电机的特点,未来NTV的发展更偏向于采用电动机,或许也会出现混动的车型来提高动力性和续航能力。
3 NTV控制系统的研究及测试
3.1 研究机构及其车型
奔驰在1997年法兰克福车展上推出了“F300FifeJet”概念车。这款车的是双座串联舱室,一体式的机舱、发动机是倾斜的,通过一个“主动倾斜控制”(ATC)系统[9]作用于两个前轮。单后轮传输驱动。
2003年至2006年Johan Berote在Dynamics and control of a tilting three-wheeled vehicle中提到的CLEVER是一种直接倾斜控制的三轮原型车,由巴斯大学开发,欧盟资助一部分的项目。控制策略利用速度和转向的测量来预测横向加速度,从而预测在转弯时平衡车辆所需的倾斜角度。然后使用两个液压执行器将车辆的驾驶室倾斜到所需的角度。虽然车辆在稳定状态下表现良好,但瞬态冲击会导致车辆不稳定并最终翻车[10]。
Dynamics and control of a tilting three-wheeled vehicle的工作是了解导致瞬态不稳定的动力学,设计一种控制方法,以改善车辆的操控特性并防止危险的瞬变。为了研究车辆的动力学并测试新的控制系统,使用软件开发了一个完整的模型。使用整车模型,可以分析可能导致车辆瞬态翻车的场景,从而很好地理解导致这些潜在危险情况的动力学。考虑到这些动力学因素,进行了横向动力学优化研究,证明了独立控制倾斜机构和横向加速度的必要性,证实了转向和直接倾斜控制相结合的必要性。
在2011年时Auguste van Poelgeest 开发一种新的转向倾斜控制(STC)算法。该研究的目的是确定三轮倾斜车辆的独特运动学,并确定运动学效应对车辆系统的重要性。推导了驾驶员感知加速度的广泛表达式,并对三轮倾斜车辆组件的非倾斜部分的侧倾动力学进行了建模。对车辆的转向扭矩进行了全面分析,并利用仿真模型对侧风对车辆的影响进行了建模,测试了上坡或下坡行驶的影响,并考虑了道路外倾角对车辆动力学的影响。
3.2 控制方式存在的问题
虽然车辆在稳定状态下表现良好,但瞬态动力学已被证明会导致车辆不稳定并最终翻车。即使是使用DTC\STC的控制方式,在DTC\STC切换的时还是会不稳定,低速行驶的稳定性也很难得到保证。
4 NTV的发展预测
我们对NTV的发展做出如下几方面的预测:
1)市场方面:目前NTV的量产车型少之又少,还有很大的市场空间,它的出现可以解决很多个人的出行问题,减少交通拥堵,提高交通效率等。
2)结构方面:多采用前2后1的轮胎布局,前轮转向或者后轮转向。
3)车身方面:ntv将来会采用封闭式的承载车身,这样的驾乘人员的安全性,舒适性都会得到保障。
4)侧倾控制方面:随着技术的成熟,侧倾控制更多的会倾向于多种控制方式无限衔接切换。自主主动控制的方法为主,保证车辆行驶的安全性。
5)动力方面:更会趋向于电动化的方向,为了满足长途驾驶,也有可能会产出混动的动力方式。
江苏省大学生创新创业训练计划项目(202013654003Y):ENV后轮转向机构设计。
参考文献:
[1]https://baijiahao.baidu.com/s?id=1723798893914215026&wfr=spider&for=pc.
[2]https://newatlas.com/nissan-landglider/13368/.
[3]https://baike.baidu.com/item/%E5%A5%A5%E8%BF%AAUrban/4303957?fr=aladdin.
[4]黃智,钟志华.菱形新概念车转向性能分析[J].湖南大学学报(自然科学版),2006(06):46-50.
[5]Tang, Chen et al. “Design and analysis of an integrated suspension tilting mechanism for narrow urban vehicles.”Mechanism and Machine Theory 120(2018):225-238.
[6]Tang, Chen and Amir Khajepour.“Narrow Tilting Vehicles: Mechanism, Dynamics, and Control.”Synthesis Lectures on Advances in Automotive Technology(2019): n. pag.
[7]王志强.电动汽车运动控制研究[D].天津:河北工业大学,2013.
[8]于丛赫.王凌.孙策.张宇. 可倾斜式车辆转向机构的设计[J].北京:北京交通大学.2013.
[9]Anonymous,Mercedes Benz UK [online]. Available from:http://www2.mercedesbenz.co.uk/content/unitedkingdom/mpc/mpc_unitedkingdom_website/en/home_mpc/passengercars/home/passenger_cars_world/innovation_new/concept_cars.0004.html[Accessed 16/12/2010].
[10]Berote, Johan J. H..“Dynamics and control of a tilting three wheeled vehicle.” (2010).
