基于PID算法的低功耗微型磁悬浮控制系统设计
2023-07-13陈家栋李向春马海琴王原刘颜明
陈家栋 李向春 马海琴 王原 刘颜明

摘 要:针对当前市面上微型磁悬浮装置调节不够快速灵敏,导致调节功耗大的问题,提出一种基于PID算法的低功耗微型磁悬浮控制系统。首先,详细介绍了微型磁悬浮控制系统的方案设计,包括磁悬浮系统结构、磁悬浮控制方案以及悬浮体失衡控制原理;然后,从关键电路设计和程序设计方面介绍了基于PID算法的磁悬浮控制系统实现;最后,对所设计的磁悬浮控制系统进行了测试,并与市面上购买的磁悬浮装置进行了功耗测试对比。测试结果表明,所设计控制系统实现了磁悬浮的低功耗调节。
关键词:磁悬浮;PID算法;低功耗;自动控制
中图分类号:TP273 文献标志码:A 文章编号:1671-0797(2023)13-0035-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.13.009
0 引言
近年来,随着社会经济和科学技术的迅速发展,磁悬浮已经逐渐走进了人们的生活,如出现了磁悬浮列车、磁悬浮地球仪、磁悬浮音箱、磁悬浮展示台等[1-2],磁悬浮技术给人们带来了新的生活体验,提高了人们的生活水平。常见的磁悬浮展示装置有上拉式磁悬浮装置和下推式磁悬浮装置。上拉式磁悬浮装置电磁线圈在被悬浮体上面,依靠磁场间异性相吸的特性产生吸引力平衡重力使悬浮体悬浮[2]。优点是系统的性能参数可以在线调节,但视觉效果不明显[3]。下推式磁悬浮装置通过永磁体间的斥力来支撑悬浮体,相对于上拉式磁悬浮装置,具有更强的抗干扰能力,更具有视觉效果,可更好地展示磁悬浮技术的吸引力。
鉴于当前市面上的磁悬浮装置多数都是采用硬件电路调控悬浮体,调节不够精准、不够灵敏,导致调节功耗大等问题,本文设计了一个基于PID算法的低功耗微型磁悬浮控制系统,以实现悬浮装置快速稳定调节,降低系统的调节功耗。
1 微型磁悬浮控制系统方案设计
1.1 微型磁悬浮系统结构
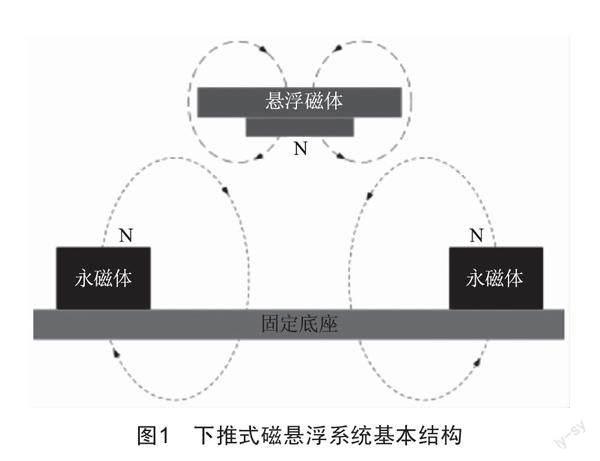
本文采用下推式磁悬浮系统,系统结构如图1所示,由底座永磁体和悬浮磁体组成。
在垂直方向上,悬浮磁体与底座磁体之间存在排斥力,该排斥力克服了悬浮磁体的重力作用,使悬浮体悬浮于空中某一垂直高度。在水平方向某一位置上(理想情况下为中心位置),悬浮磁体受到底座磁体的左右斥力是平衡相等的,无须控制也可保持平衡稳定的悬浮状态。但由于变化的外界环境因素影响,悬浮磁体容易因失去平衡状态而掉落。因此,为维持悬浮磁体长期处于平衡悬浮状态,必须引入自动控制系统。加入自动控制系统的磁悬浮系统结构如图2所示,由底座永磁体、悬浮磁体、电磁线圈、三轴霍尔传感器及单片机检测控制电路组成。自动控制系统通过霍尔传感器检测悬浮磁体的位置,再利用单片机控制电磁线圈将失去平衡状态的悬浮磁体调整至平衡状态。
1.2 磁悬浮自动控制方案设计
1.2.1 磁悬浮自动控制系统框图
磁悬浮自动控制系统如图3所示。
1)霍尔传感器:把悬浮体处于不同位置的磁场信号转换为电压信号。
2)信号放大电路:放大霍尔传感器输出的电压信号,并将其输出到STM32单片机进行A/D转换。
3)STM32单片机:采集放大电路输出的电压信号,通过PID位置式算法计算出悬浮体的位置信息,并产生PWM驱动信号,通过电磁线圈改变空间磁场,从而调整悬浮体的位置。
4)H桥驱动电路:将单片机输出的PWM控制信号进行功率放大,驱动电磁线圈。
5)电磁线圈:通过周期变化的电流信号产生电磁场,进而控制调节悬浮体的位置。
1.2.2 磁悬浮系统失衡控制原理
为检测悬浮体的位置,在悬浮体下方的中心点位置安装一个垂直于水平面的线性霍尔传感器。线性霍尔传感器的输出电压与磁感應强度的特性曲线如图4所示。由图4可知,霍尔传感器可输出与磁感应强度成正比的电压信号,根据该电压的大小可判定出悬浮体的位置。
磁悬浮系统失衡控制原理如图5所示。为控制悬浮磁体的位置,在水平面X、Y轴方向上分别放置两个电磁线圈。同一坐标轴上的两个电磁线圈为串联关系,但其电磁线圈的导线绕向相反。
以X轴方向为例,如当悬浮磁体受到干扰打破平衡偏离中心点向左时,霍尔传感器检测到穿过自身的磁感线密度变化,输出相应的变化电压给单片机。单片机根据线性霍尔传感器输出的反馈信号,给电磁线圈输入相应方向的电流,左线圈对悬浮磁体产生斥力F1,右线圈因为绕向相反而产生吸引力F2,F1与F2合成向右的作用力F,从而将悬浮体拉回至平衡点。Y轴方向控制原理与X轴相同。
2 基于PID算法的磁悬浮控制系统实现
2.1 关键电路设计
2.1.1 霍尔传感电路设计
本设计选用超高灵敏度霍尔传感器,型号为HW101A-G,电路如图6所示。X为X轴方向霍尔传感器的输出,Y轴和Z轴方向的传感电路与此相同。
2.1.2 放大电路设计
鉴于选用的霍尔传感器内部无放大电路,为了提高检测速度和灵敏度,需加入电压放大电路,放大霍尔输出电压的变化量。放大电路如图7所示。
放大电路输出VADC与霍尔传感器输出电压Vx的关系如式(1)所示:
系统采用单电源供电,RP3为基准电压VREF调节器,调节使得VREF≈=0.6 V,作用是调节放大器输出的电压偏移量,将信号电压调节至适合STM32单片机内部ADC采集的范围。同时放大电路将霍尔输出变化电压放大约20倍,以提高检测灵敏度。
2.1.3 H桥驱动电路设计
本设计选取TI公司的DRV8870独立H桥驱动芯片,该芯片由4个N沟道半导体场效应晶体管组成H桥,能够双向控制负载,峰值电流最高可达3.6 A。驱动电路如图8所示。
线圈最大电流Imax可由式(2)估算,通过PR1调节4引脚电压VREF。利用R23和R24并联分流,减少单个电阻的发热量,从而提高系统稳定性。
2.2 关键程序设计
2.2.1 悬浮体检测控制程序设计
悬浮体检测控制程序如图9所示,检测控制程序设在定时器中断服务程序里进行。
数据采集:利用STM32片内的12位ADC对信号进行采集,为了减轻处理器负担以提高处理效率,开启DMA传输。DMA传输可将数据搬运至指定地址的内存,并不需要占用CPU。
数据处理:对采集的数据进行排列,去除最大、最小值,取剩余数据的均值。
悬浮体检测控制:首先通过采集Z轴的霍尔电压来检测是否存在悬浮体;然后调用PID函数计算,检测出悬浮体的水平方向位置,并控制输出PWM信号改变X、Y轴的电磁线圈电流,从而调整悬浮体至平衡位置。
2.2.2 位置式PID算法程序设计
PID控制算法是由比例、积分和微分三项结合的控制算法。比例调节作用:控制系统一旦出现偏差,比例项会立即参与调节,减小偏差[4]。比例调节的作用越大,调节速度越快,但是过大的比例调节,超出原有误差,会导致系统出现不稳定。积分调节作用:消除稳态误差,使其绝对差值接近于0。微分调节作用:微分项可以反映偏差信号的变化率。由于其计算方式特殊,对误差有预见性,能对偏差变化的趋势做出判断,即能产生提前的控制作用。添加微分项参与调节,能改善系统的动态性能。
本文采用位置式PID算法,程序流程如图10所示。首先,计算ADC采集的电压与系统设定的中心位置数值之差,得出比例项。其次,每次计算均对误差进行累加,累加數值即为积分项,需将积分项限制在适宜的范围内。然后,微分项为当前误差值与上一次误差的差值。最后,将PID的各项数值分别与相应的系数相乘之后求和得PID输出,限制输出误差于适宜范围,并更新存储误差。
3 实验结果及分析
经测试,磁悬浮系统实现了稳定平衡的效果。图11为悬浮系统测试效果图。
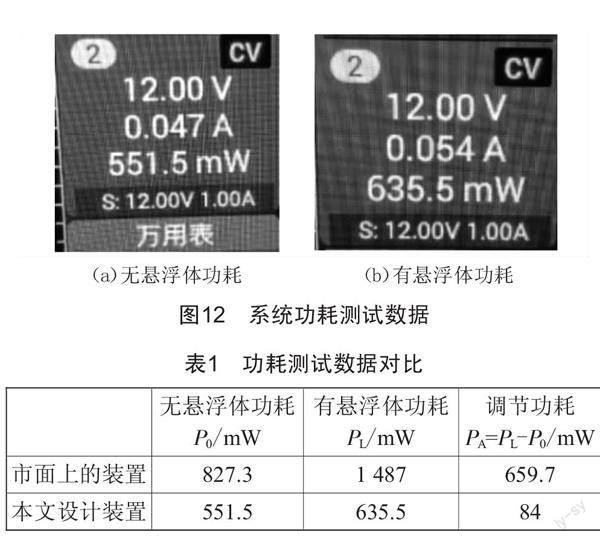
为了验证所设计系统为低功耗系统,对系统进行了功耗测试,图12为功耗测试数据。当无悬浮体时,系统功耗仅为551.5 mW;当有悬浮体时,系统功耗仅为635.5 mW。
为了进一步验证效果,与市面上购买的装置进行了同等条件下的测试数据对比,如表1所示。由测试数据可知,本文设计的磁悬浮控制系统具有明显的功耗优势。
4 结束语
本文所设计的微型磁悬浮控制系统包含了单片机控制器、霍尔传感器采集电路、H桥驱动电路等。基于PID控制算法和脉宽调制原理,通过霍尔传感器检测悬浮磁体的位置,再利用单片机控制电磁线圈将失去平衡状态的悬浮磁体调整至平衡状态。控制系统实现了快速稳定调节悬浮体,使其处于稳定平衡状态,具有调节功耗低的优势,对磁悬浮系统的进一步研究具有一定的参考意义。
[参考文献]
[1] 朱佳涛,赵鸿霍,敖鑫,等.一个磁悬浮展示台的设计[J].电脑知识与技术,2022,18(21):91-93.
[2] 胡帅,陈晓岑,张丽,等.下推式混合磁悬浮装置的设计与仿真研究[J].数字制造科学,2019,17(1):45-48.
[3] 张维煜,朱熀秋,鞠金涛,等.磁悬浮轴承研究现状及其发展[J].轴承,2016(12):56-63.
[4] 王长正.板球系统的PID控制器参数智能优化研究[D].昆明:昆明理工大学,2019.
收稿日期:2023-04-17
作者简介:陈家栋(1986—),男,广西合浦人,讲师,研究方向:测试计量技术及仪器。
通信作者:刘颜明(1990—),男,辽宁沈阳人,专任教师,研究方向:工业先进过程控制。
