不同农机驾驶方式对玉米播种出苗率的影响*
——基于无人机多光谱影像的测算
2023-07-11徐岚俊孙梦遥张传帅王迪李传友吴才聪
徐岚俊,孙梦遥,张传帅,王迪,李传友,吴才聪
(1.北京市农业机械试验鉴定推广站,北京市,100079;2.北京科技创新促进中心,北京市,100142;3.中国农业大学,北京市,100083)
0 引言
无人机多光谱遥感技术具有覆盖面积大、获取信息效率高、监测精度高、操作便捷等优势,在农作物生长信息分析领域已广泛应用[1-2],特别在作物长势监测、产量估测、作物病虫害监测、作物植株水分含量等方面研究应用较多[3-7]。陈成等[8]基于无人机遥感技术开展了玉米长势的评价研究,通过光谱数据构建了玉米归一化作物指数,实现了玉米长势的高效便捷监测。卢闯等[9]利用无人机多光谱影像开展了春玉米田管理分区,利用吐丝期玉米无人机多光谱影像,基于多尺度分割与模糊聚类相结合方法,实现低成本高效的分区,为农田管理分区提供了参考方法。目前,获取玉米出苗率的方法大致可分为人工实测、机械手点数、光电传感和图像识别 4 种。其中,运用无人机多光谱影像开展图像识别技术获得某一地块作物数量来计算出苗率,覆盖范围广,而且计算结果精确可靠,效率高。玉米幼苗期的株型结构适合垂直俯拍,玉米苗和杂草的形状差异明显。因此,无人机多光谱遥感技术用于大面积玉米出苗率测算具有较好的可行性和优势。
大田农机作业发展趋势由传统人工作业发展到辅助驾驶作业,再到农机无人作业,但辅助驾驶作业和农机无人作业是未来发展趋势,具有智能化、精准化、高效化、数字化等发展趋势,对解决“无人种田”具有较大意义[10-12]。近几年,新疆、黑龙江、上海、北京等地开展了农机无人农场建设和农机无人化作业试验示范工作,验证了农机无人作业的可行性和发展优势[13-14]。随着农机无人驾驶技术在各类农业作物不同环节试验应用,国内外很多学者开展了无人驾驶、辅助驾驶、人工驾驶的作业效率、作业成本、作业质量的分析和研究[15]。无人驾驶、辅助驾驶技术逐渐成熟,在玉米等大田作物种植领域的优势逐渐凸显。
为验证无人驾驶、辅助驾驶和人工驾驶对玉米播种出苗率的影响,本文拟以鲜食玉米为试验作物,采用基于无人机多光谱影像的测算模型方法,在配套相同的播种机具、种植条件和管理水平的基础上,对玉米出苗情况进行分析,为无人驾驶、辅助驾驶替代人工驾驶开展玉米播种的可行性提供依据。
1 材料和方法
1.1 试验区概况
试验地点位于北京市密云区河南寨镇陈各庄村,面积30.47 hm2,试验地属于暖温带半湿润气候,年均气温9 ℃左右,无霜期170 d,年均降雨量608 mm,年均日照时数2 801 h。选取典型地块作为研究区(图1),其中无人驾驶、辅助驾驶、人工驾驶区域分别为1.67 hm2、1.80 hm2、1.93 hm2。各分区种植作物均为鲜食玉米,品种选用农科糯336,千粒重394.7 g,播种时间为2022年6月30日,种植行距60 cm,株距32 cm,播种密度51 000~52 599粒/hm2。施肥情况为450 kg/hm2缓释肥,其他管理无差异。无人驾驶区域采用2204无级变速无人驾驶拖拉机作为动力机械,辅助驾驶区域采用搭载自动驾驶系统的2204拖拉机作为动力机械,人工驾驶区域采用25年驾龄的机手驾驶2204拖拉机作业,播种机具均为6行玉米播种机。无人机图像采集时间为2022年7月28日、29日。
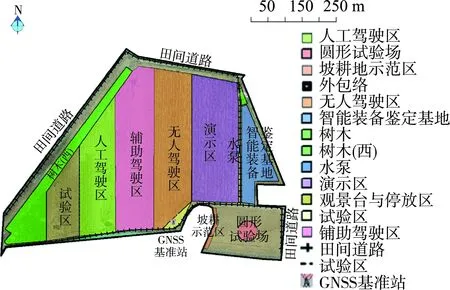
图1 试验区域划分Fig.1 Division of test area
1.2 无人机影像数据采集与预处理
无人机平台采用大疆经纬系列M300无人机,搭载禅思P1可见光镜头,包括蓝绿红3个波段,主要采集玉米真彩色影像。传感器照片尺寸为35.9 mm×24 mm(全画幅),传感器视频尺寸为34 mm×19 mm,有效像素为4 500万,像元大小为4.4 μm。大疆精灵4多光谱版无人机,包括蓝绿红、红边、近红外5个波段,主要采集玉米多光谱影像,影像传感器配置为6个1/2.9英寸CMOS,包括1个用于可见光成像的彩色传感器和5个用于多光谱成像的单色传感器,单个传感器有效像素208万。两种无人机RTK定位精度均为1 cm+1 ppm(水平)、1.5 cm+1 ppm(垂直)。无人机参数设置应综合考虑研究目的、测区情况及无人机自身性能。航向重叠度与旁向重叠度越高,影像拼接效果越好,但高度重叠会造成影像数据量大、拼接费时、电脑硬件要求高等问题。本文设计航向80%、旁向70%的重叠率,其中出苗期无人机飞行高度为80 m,影像的分辨率是5 cm。由于飞行速度过快易造成地物影像模糊,本文设定无人机航速为10 m/s,传感器镜头垂直向下,拼接影像涵盖整个研究区。研究区为大面积玉米种植区,区内典型地物相对较少,为方便后期影像几何校正处理,于测区内均匀布设5个航测标志点,作为典型参考点。航拍前均在地面放置一块校准反射面板,每个架次起飞前,手动控制飞机悬停于校正板上方2.5 m处拍照,获得当时条件下标准反射率值。
获取无人机影像后,采用大疆智图软件进行拼接,在影像处理过程中利用飞行前获得的校准反射面板数据校正所有航拍影像。使用ENVI 5.3软件,以研究区数码正射影像为参考影像,全区均匀选取15个参考点(包括5个航测标志点)对多光谱影像进行几何校正,检验图像几何纠正误差小于2个像元。根据地面实测数据点在影像上的位置,构建样本点的感兴趣区域(Region of Interest,ROI),以ROI范围内平均反射率光谱值作为该点的玉米反射率光谱,以此得到各样点反射率光谱数据。无人机玉米密集度空间分布如图2所示。
1.3 试验方法
1.3.1 玉米苗识别与提取
利用二值化模型,对多光谱影像进行玉米苗特征点解译,基于确定的特征点,利用超绿值(ExG)和最大类间差法相结合的方法从农田背景中提取玉米苗。获取的玉米苗原始多光谱图像如图3所示,玉米苗识别与提取处理后的图像如图4所示。

图3 玉米苗原始多光谱图像Fig.3 Original multispectral images of maize seedlings
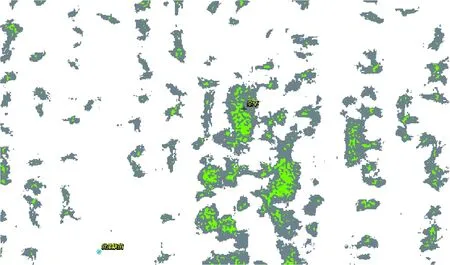
图4 玉米苗识别与提取Fig.4 Identification and extraction of maize seedlings

图5 重点分析区NDVI示意图Fig.5 NDVI schematic diagram of key analysis area
基于无人机多光谱影像,利用二值化模式进行玉米苗特征点解译,通过机器学习训练该特征点,可增加特征点识别的准确性。
1.3.2 植被指数计算
在经常用于精准农业的各种植被指数中,归一化植被指数(NDVI)是应用最为广泛的一种。NDVI对植被信息极为敏感,能够区分植被和裸土。试验区只有玉米苗和裸土,所以选择NDVI进行玉米苗覆盖度的计算。
式中:BandNIR——地物在近红外波段的反射率;
Bandred——地物在红光波段的反射率。
负值主要是因水体信息产生,接近零的值则主要由于岩石和裸土而产生,正值表示有植被覆盖,且随覆盖度增大而增大。
1.3.3 实测数据处理
实地采集数据过程中,在田间5个点位,测量在垂直于垄方向30 m范围内的垄数,并计算平均垄数。随机选定样垄,抽取此垄10 m范围,记录已露出土壤的苗数。
基于空间定位技术,将实地采集的玉米苗数据进行空间化。本次实测数据采集共设计样条15个,规格统一为10 m×0.6 m。其中,三个区域内各取样条5个。空间化过程中为每一个样条分配唯一编号,样条分布如图6示。
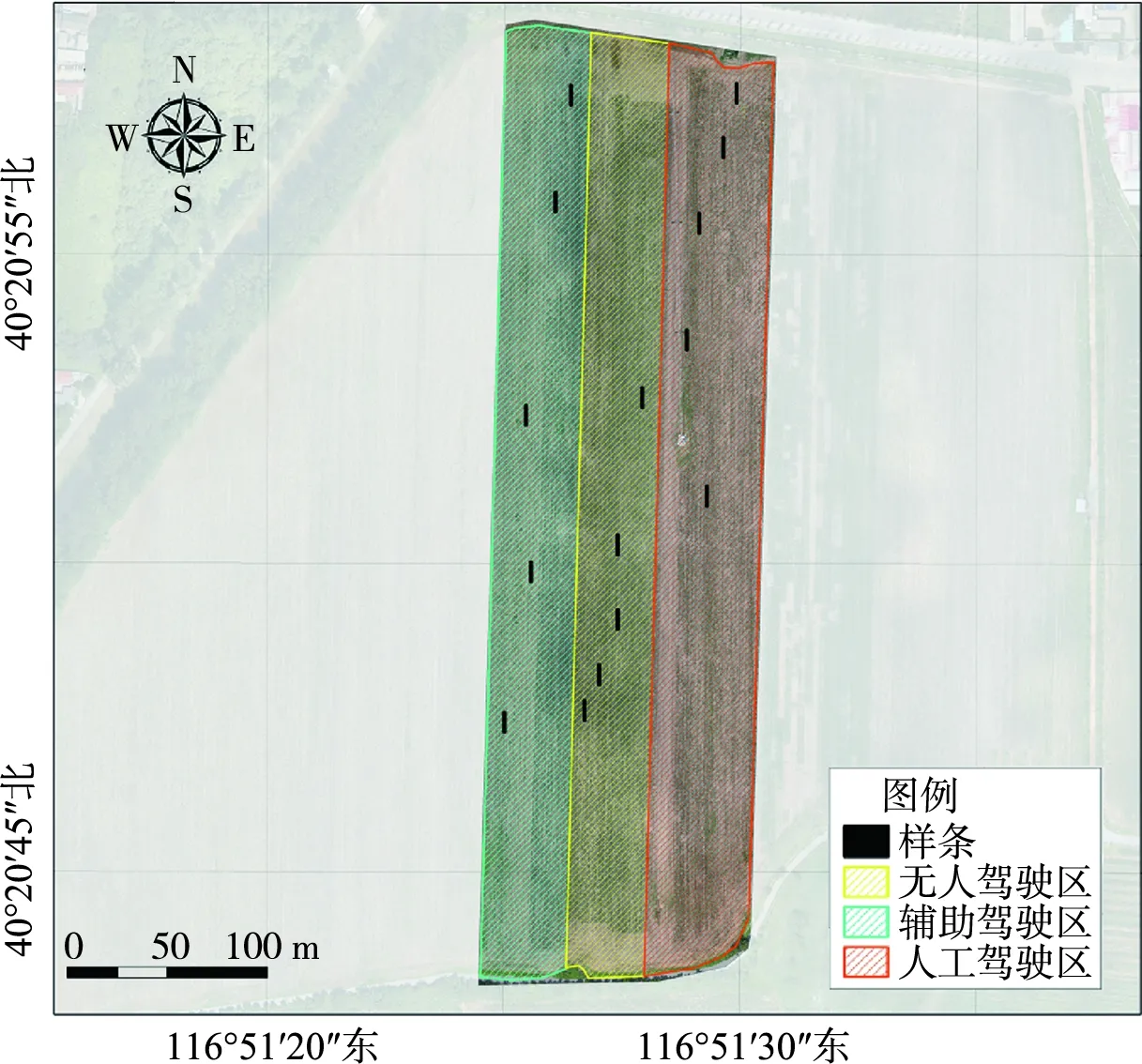
图6 玉米田实测样条示意图Fig.6 Schematic diagram of measured spline in maize field
2 结果与分析
2.1 实测出苗率计算
人工驾驶区、辅助驾驶区、无人驾驶区设置播种密度相同,种植49垄,宽度30 m。分别计算每个样方的粒数和出苗率,对于每个样条的播种粒数,假设整个区域播种均匀,每个样条内所播种的玉米种数均相同。样条玉米出苗率统计结果如表1所示。

表1 样条玉米出苗率统计Tab.1 Statistical table of seedling emergence rate of spline corn
2.2 区域出苗率计算与对比
使用无人机采集出苗期多光谱影像,使用超绿值(ExG)和最大类间差法相结合的方法提取农田背景中玉米苗特征图像,计算归一化植被指数(NDVI),基于实测计算的出苗率与区域NDVI,建立对应关系,利用空间分析技术计算无人驾驶、辅助驾驶、人工驾驶方式下出苗率情况。
基于无人机多光谱影像的玉米出苗率分布如图7所示。

图7 基于无人机多光谱影像的玉米出苗率分布Fig.7 Distribution of maize emergence rate based on UAV multispectral image
基于无人机多光谱影像测算方法的无人驾驶、辅助驾驶、人工驾驶播种出苗率分别为67.47%、66.30%、52.83%,实测出苗率分别为72.19%、66.23%、55.49%,差异度分别为-4.72%、0.07%、-2.66%,出苗率为无人驾驶区>辅助驾驶区>人工驾驶区,无人驾驶区出苗率最高,且出苗率较为均匀,如表2所示。

表2 玉米出苗率统计表Tab.2 Statistics of maize emergence rate
从差异度来看,无人驾驶区>人工驾驶区>辅助驾驶区,无人驾驶区遥感计算结果与实测结果差异较大,通过空间数据分析发现,生长异常区对整个区域的出苗率估算有较为明显的影响,然而并未对该区域进行样本采集与统计,因此导致二者差异度相对较大。在去除地块土壤差异等异常因素外,基于无人机多光谱影像的测算方法较为准确。
3 结论
1) 从数据获取途径和表达范围来看,无人机多光谱遥感数据更能全面、客观地反映出玉米出苗整体区域的状况。基于出苗期无人机多光谱影像,使用超绿值(ExG)和最大类间差法相结合的方法提取农田背景中玉米苗图像,计算归一化植被指数(NDVI),基于实测计算的出苗率与区域NDVI,建立对应关系,对玉米出苗率的计算方法可靠。相对传统测算方式,采用无人机多光谱影像对玉米播种率进行测算,具有工作效率高、准确率高、覆盖范围大等明显优势。
2) 整体来看,基于无人机多光谱影像测算方法的无人驾驶、辅助驾驶、人工驾驶播种出苗率分别为67.47%、66.30%、52.83%,实测出苗率分别为72.19%、66.23%、55.49%,均表现为无人驾驶区和辅助驾驶区出苗率高于人工驾驶区,并且无人驾驶区出苗率更均匀,说明无人驾驶和辅助驾驶方式借助信息化、智能化技术,消除了部分人工驾驶导致的误差,并且劳动强度、操作便捷性均有明显提高,对于提升产量和后期的田间管理也有较大意义。农机无人驾驶方式在玉米播种环节中作业质量明显高于辅助驾驶和人工驾驶方式,具有较好的推广应用可行性。
