履带式农业装备黏土壤土通过性研究*
2023-07-11黄雪涛谢虎李加坤陈璐瑶董明明吕唯唯
黄雪涛,谢虎,李加坤,陈璐瑶,董明明,吕唯唯
(1.山东交通学院汽车工程学院,济南市,250357;2.北京理工大学机械与车辆学院,北京市,100081;3.农业农村部南京农业机械化研究所,南京市,210014)
0 引言
近年来,随着《中国制造2025》及乡村振兴战略的推进,高端装备制造业得到了迅猛发展。作为高端装备的一种,履带式农业装备在国民经济发展和农业生产中占据着重要的地位,必须能够在涉及的耕地、沙漠、沼泽、滩涂等复杂的地面地貌上高效的作业。
然而,履带式农业装备在软土壤土地面上的通过性研究涉及复杂的土壤力学特性、地面履带耦合机理等内容,是当今农业装备领域研究的热点和难点之一。Irani等[1]研究了齿状刚性轮在松软沙土中的沉陷过程;Jayakumar等[2]针对微型车辆在松软地面上的土壤承载问题,研制了松软土壤压力—沉陷试验台;Wasfy等[3-4]研究了履带—地面耦合系统的仿真分析方法;Gerhart[5]基于Bekker模型分析了履带板作用下地面土壤的剪切变形情况;Contreras等[6]分析了履带牵引特性与履刺、履带结构参数、地面力学特性、滑转率之间的关系;Mason等[7]提出了一种基于圆锥指数法的履带车辆在松软路面上一次性通过的评估方法;Parker等[8]提出了一种广域内车辆越野机动性预测的评估方法;Choi等[9]提出了一种基于可靠性判定的随机越野机动性地图的软件开发框架;Gonzalez等[10]基于地面高程误差和土壤力学特性的随机性,提出了一种越野车辆随机迁移算法;Tang等[11]构建了履带—地面非线性模型,提出了一种高可靠性、通用、模块化的履带动力学仿真算法;Gorsich等[12]提出了基于地面力学特性感知技术的无人驾驶车辆机动性评估算法。Nicolini等[13]基于履带与地面的耦合作用关系,构建了考虑地面力学特性的履带车辆—地面多体动力学仿真模型,分析了履带车辆的越障能力。Yang等[14]基于履带板土槽试验,提出了基于Bekker承压模型的土壤沉陷量与土壤力学特性参数、含水率及重复加载关系的理论模型。黄雪涛等[15-16]研究了履带张紧力及其对履带车辆越野通过性的影响规律;孙术发等[17]研究了基于履带式底盘的改进型森林消防车辆的越野通过性;鲍玉冬等[18]研究了基于轮壤接触力学行为的蓝莓采收机行走驱动系统的设计方法;谢虎等[19]研究了基于越野通过性的农用运输车辆减隔振技术;陈继清等[20]研究了基于RecurDyn仿真技术的小型绿篱修剪机履带底盘的越障性能。前人的研究主要集中在土壤承载模型的构建及装备的越野通过性等方面,对履带式农业装备在黏土壤土地面上的通过性研究相对较少。
本文以履带式农业装备为研究对象,通过试验验证和仿真分析相结合的方法研究履带式农业装备在黏土壤土上的通过性,为履带式农业装备的设计研发提供理论基础和技术支撑。
1 黏土壤土力学特性试验
为研究履带式农业装备在黏土壤土上的通过性,需构建黏土壤土的土壤承载力学模型。然而,全国各地的土壤性能差异性很大,为研究问题的方便,本文选取山东德州地区的黏土壤土作为研究对象,并采用实地采样的方式进行了土壤样本的采集工作。样本土样属于扰动土类型,为了最大限度地还原土壤的原有力学性能,需依据圆锥指数法对采集的土壤样本进行重构,现场测量得到的黏土壤土硬度—深度关系曲线如图1所示,将其作为实验室土样制备的标准和依据。

图1 黏土壤土硬度—深度关系曲线Fig.1 Hardness-depth relation curve of clay loam
黏土壤土的承压特性选用Bekker承压模型来描述,即
(1)
式中:p——作用在单位面积上的压力;
z——某级载荷下的沉陷量;
b——圆形压板的半径;
q——变形指数;
kc——黏聚模量;
K——沉陷系数;
kφ——摩擦模量。
参数q、kc、kφ的确定采用加权最小二乘法,即
(2)
(3)
由式(3)可知,通过两个不同尺寸的压板试验,可联立求解kc和kφ,若
则按照式(4)计算变形指数q,否则重新试验,测取新的数据。
qav=(q1+q2)/2
(4)
式中:qav——变形指数均值;
q1、q2——对应两个压板计算得到的变形指数。
按照式(5)计算黏聚模量
(5)
式中:b1、b2——两个压板的半径。
按照式(6)计算摩擦模量
(6)
采用高精度电子万能试验机进行黏土壤土的室内压板试验,压板分别采用半径为70 mm和90 mm的圆形压板,加载速率取50 mm/min,施加的垂直载荷分别为1 900 N(半径为90 mm压板)和1 200 N(半径为70 mm压板),通过对试验数据的处理,得到土壤样本的承压特性参数如表1所示。
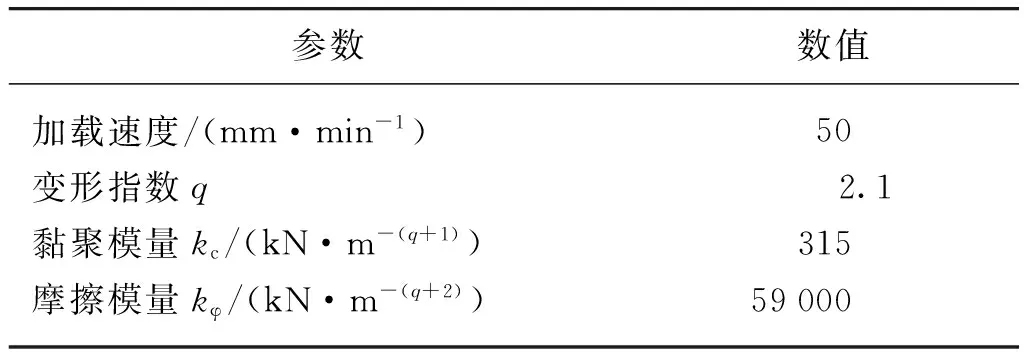
表1 黏土壤土样本的承压特性参数Tab.1 Bearing characteristic parameters of clay loam samples
黏土壤土的抗剪强度采用莫尔—库伦强度理论来描述,即
τmax=c+ptanφ
(7)
式中:τmax——最大抗剪强度;
c——内聚力;
φ——内摩擦角。
本文采用ZJ型应变控制式直剪仪进行土壤样本的直剪试验,施加的垂直应力等级为25 kPa、50 kPa、75 kPa、100 kPa,当样品达到平衡状态后以2.4 mm/min的剪切速率开始直剪试验,以剪应力τ为纵坐标,以剪位移j为横坐标,绘制土壤样本的剪切应力—位移关系曲线,如图2所示。
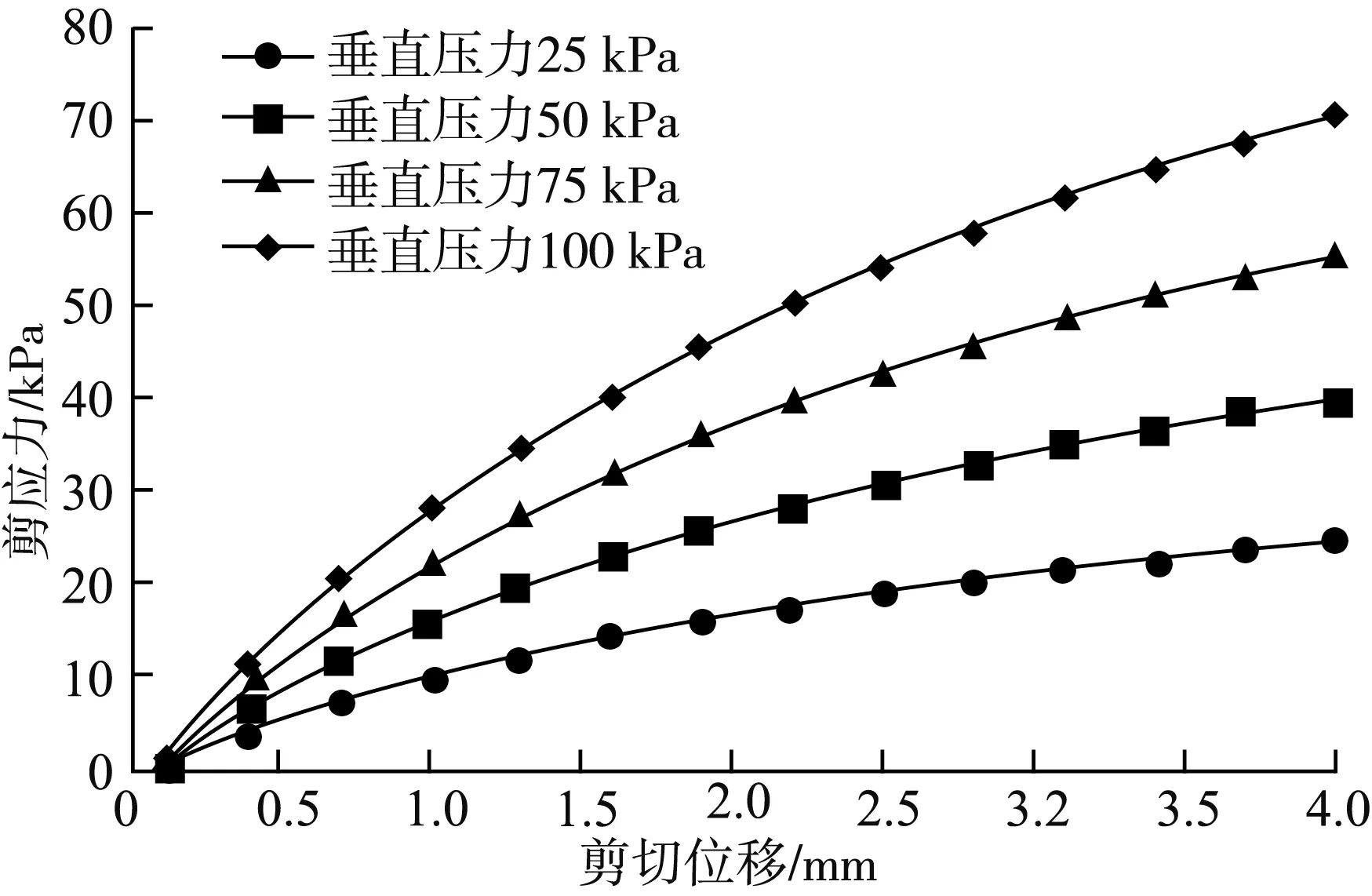
图2 黏土壤土剪切应力—剪位移关系曲线Fig.2 Shear stress-displacement relation curve of clay loam
由图2可知,黏土壤土的剪切应力—剪切位移关系曲线上没有峰值点,故取剪切位移为4 mm处的剪切应力作为黏土壤土的抗剪强度,得到不同垂直压力下黏土壤土的抗剪强度如表2所示,通过对试验数据的分析,利用摩尔—库伦定律计算得到黏土壤土的内聚力c=9.69 kPa及内摩擦角φ=31.33°。

表2 不同垂直压力下黏土壤土的抗剪强度Tab.2 Shear strength of clay loam under different vertical pressures
2 黏土壤土地面高程参数采集
为了研究履带式农业装备的通过性,除了需要分析土壤的力学特性外,还要对地面的高程参数进行采集。然而,履带式农业装备多是在田野、耕地、雪地、沙地、沼泽等非路面工况下工作,地面高程的变化复杂且无固定的规律,本文采用空间频谱的方法来构建履带式农业装备地面高程信息。地面不平度用来表示地面高程相对于理想平面的偏离程度,按地表竖向变形所在的地面剖面的不同,地面不平度可以分为纵剖面的竖向变形和横断面的竖向变形两种。地面表面纵剖面内的竖向变形是指沿履带式农业装备行驶方向的纵剖面内地面高程的变化情况,而地面表面横断面的竖向变形是指垂直于履带式农业装备行驶方向的横断面内地面高程的变化情况。本文研究的地面高程信息指的是地面表面纵剖面内的竖向变形情况。根据待测黏土壤土地面的试验条件,选用非接触式动态纵断面测试仪器即丹麦Green Wood Profilograph动态纵断面测试仪进行地面不平度测试,得到黏土壤土地面的地面不平度实测数据如图3所示。

图3 黏土壤土地面不平度实测数据Fig.3 Road roughness measured data of clay loam
国际标准化组织ISO/TC108/SC2N67详细描述了不同等级地面不平度的功率谱,即在一段有意义的空间频率n范围内,根据地面的等级情况给定地面高程谱密度。一般情况下,地面不平度功率谱密度用指数函数拟合,即
(8)
式中:n——空间频率,表示每米长度中包含n个波长;
nu、nl——地面谱的上、下限频率,根据履带式农业装备履带节距l=0.148 m,其上限频率nu=1/0.148=6.757 m-1,选定的功率谱计算频域为0.011~6.757 m-1;
n0——参考空间频率,n0=0.1 m-1;
Gq(n0)——参考空间频率n0的地面谱值;
W——路面谱的频率指数。
将测量得到的地面不平度随机数据经过傅里叶变换得到地面不平度的功率谱密度函数,并根据地面不平度功率谱密度指数函数进行拟合,得到黏土壤土地面的地面不平度功率谱拟合结果如表3所示,地面功率谱密度的测量结果与拟合结果对比关系如图4所示。

表3 黏土壤土地面不平度功率谱密度的拟合结果Tab.3 Power spectral density fitting results of clay loam ground roughness
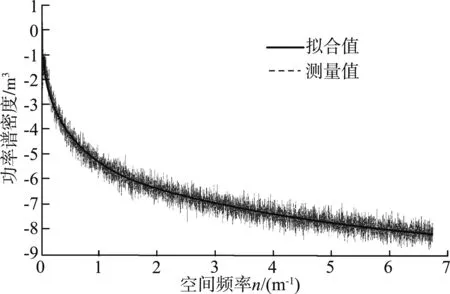
图4 地面不平度功率谱密度的测试与拟合结果Fig.4 Ground roughness power spectral density test and fitting results
3 履带式农业装备通过性仿真模型构建
履带式农业装备是复杂的多体非线性系统,传统理论的研究方法是将其简化处理,虽然计算量明显减少,但是由于简化模型是在大量假设的基础上建立的,其准确度和可信度大大降低,且履带车辆的一些重要零部件无法进行合理的简化。例如,由于履带几何结构的复杂性,在履带式农业装备的简化模型中往往将其忽略掉,而履带对履带式农业装备的重要性不言而喻。故对于履带式农业装备的通过性研究,传统的简化模型很难给出精确解,必须借助于多体动力学仿真模型进行研究。以某履带式农业装备的底盘结构为研究对象,借助于动力学仿真分析平台RecurDyn,构建履带式农业装备在黏土壤土地面上的仿真分析模型,履带式农业装备的结构参数如表4所示。

表4 履带式农业装备结构参数Tab.4 Structural parameters of crawler agricultural equipment
履带式农业装备在黏土壤土地面上的通过性取决于履带装备的接地压力分布、地面承载能力、地面抗剪能力、地面的几何形貌及履带与地面之间的耦合作用关系等,影响因素众多且影响关系复杂,履带式农业装备通过性仿真模型搭建时需综合考虑这些因素。履带作为履带装备的专有部件,在履带装备的功能应用中起着重要的作用。与轮式装备相比,履带装备的接地面积是轮式装备的几十倍甚至上百倍,其整备质量通过负重轮大致均匀地分布在每块履带板上,这一方面减少了履带对单位地面的压力,改善了装备的通过性;另一方面也扩大了装备与地面之间的接触面积,增强了装备的驱动性。地面几何形貌的构建由地面不平度功率谱密度函数经过空间频谱的傅里叶拟变换得到。
履带式农业装备和黏土壤土软地面之间的耦合作用关系涉及黏土壤土的力学特性及土壤承载模型的选择。黏土壤土的力学特性在履带环与地面的接触参数里设置,软件采用Bekker承压模型及Janosi的剪切模型作为土壤承载的标准模型,根据黏土壤土的力学特性试验结果设置地面土壤的承载特性,得到黏土壤土力学特性参数设置结果如图5所示。以某履带式农业装备为研究对象,以某地区黏土壤土地面为承载地面,结合RecurDyn仿真分析平台和土壤力学特性试验,构建的履带式农业装备在黏土壤土地面上的通过性仿真模型如图6所示。
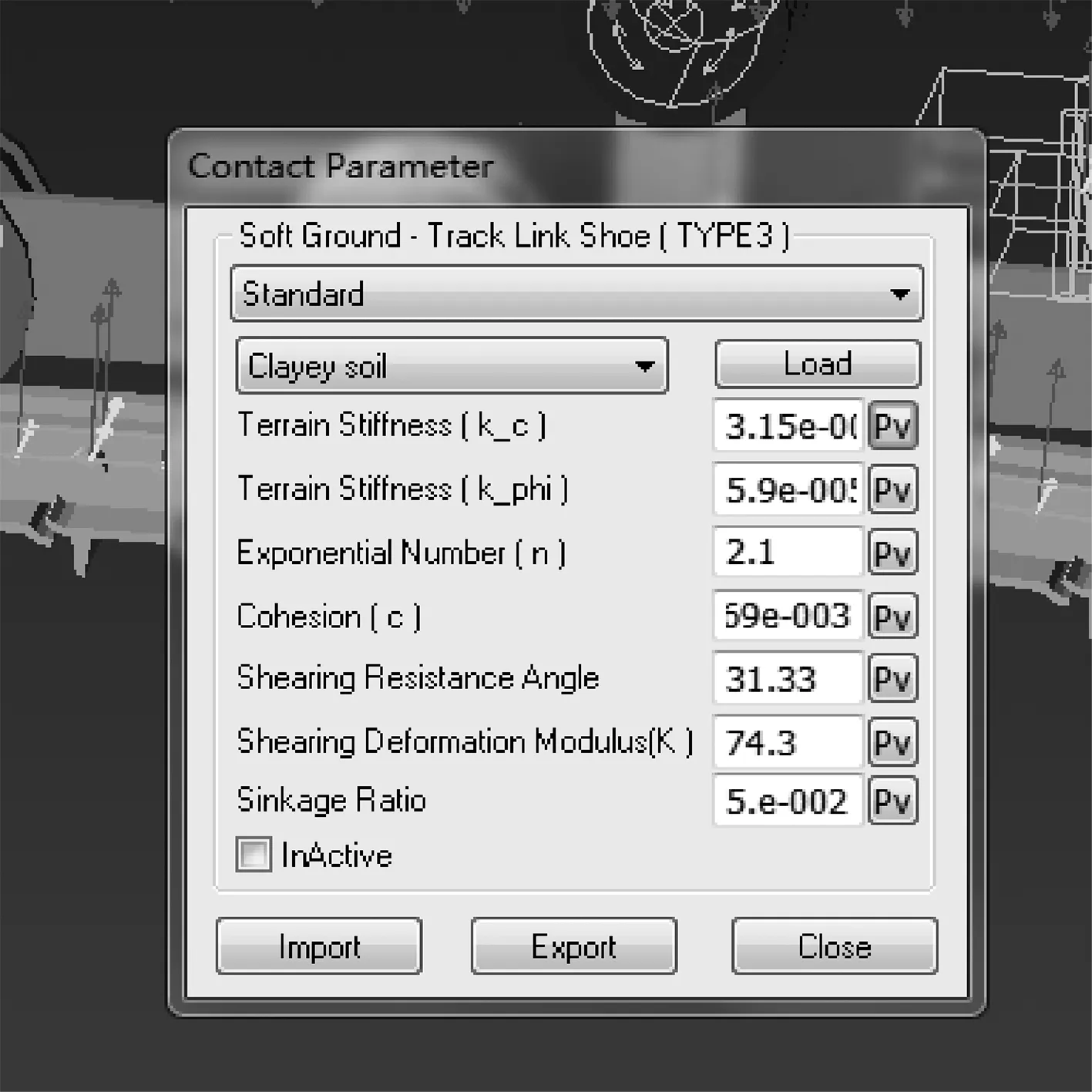
图5 黏土壤土的力学特性参数设置Fig.5 Mechanical properties setting of clay loam
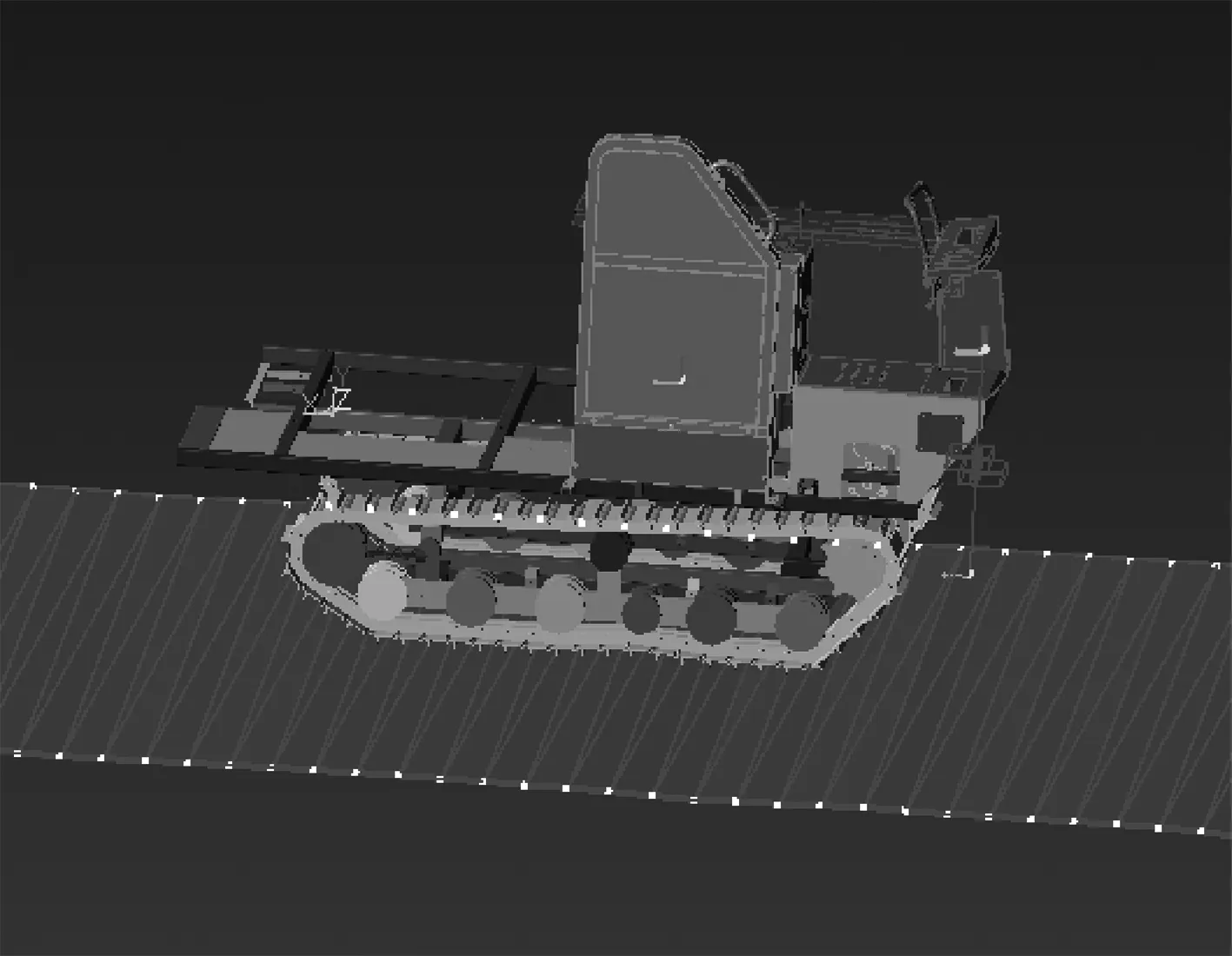
图6 履带式农业装备通过性仿真模型Fig.6 Simulation model of crawler agricultural equipment
4 履带式农业装备通过性试验
履带式农业装备的通过性是指履带式农业装备在困难路面或无路面地段作业时所表现出来的特性,是履带式农业装备能否通过各种壤土地面和地形地貌的能力。履带式农业装备的软土通过性与农业装备自身的机动性能有关,更取决于与履带相互作用的地面土壤的力学特性。履带式农业装备在黏土壤土上的通过性评价,根据功能和要求的不同,可以采用圆锥指数、平均最大接地压力、挂钩牵引力、负重轮沉陷量等指标。其中,圆锥指数法属于经验型公式,其判定方法快速简便但可靠性不高;平均最大接地压力法未考虑土壤的力学特性及履带与地面的复杂耦合关系,精确度不高;挂钩牵引力评价方法属于半经验方法,考虑了履带装备的结构参数及履刺的影响,具有一定的准确度,但未能考虑履带张紧力及履带环对地面的包络效果,仍有一定的局限性;负重轮沉陷量判定方法借助于动力学仿真技术,综合考虑了履带装备的结构参数、地形地貌、地面的力学特性参数及履带与地面之间复杂的耦合关系,是现阶段较为精确的方法,且负重轮沉陷量在实车验证时便于测量,故本文采用第一负重轮位置的沉陷量作为履带式农业装备在黏土壤土上通过性仿真分析和试验验证的评价指标。
为了研究履带式农业装备在黏土壤土地面上的通过性,本文以某履带式农业装备为研究对象,通过在第一负重轮轴心正上方履带底盘位置安装位移传感器来测量底盘相对于地面的相对位移量,通过底盘固定点相对于地面的位移变化量来计算第一负重轮的沉陷量,选用某地区的黏土壤土地面为分析对象(即本文第一部分选用的黏土壤土地面),通过现场土壤样本采集、实验室壤土重构的方式获取该黏土壤土的土壤力学特性,基于构建的履带式农业装备在黏土壤土上通过性的仿真模型,采用仿真分析和实车验证相结合的方法,研究履带式农业装备以5 km/h的速度在黏土壤土地面上作业时第一负重轮的沉陷量,得到负重轮沉陷量的仿真结果与试验结果对比关系曲线如图7所示。
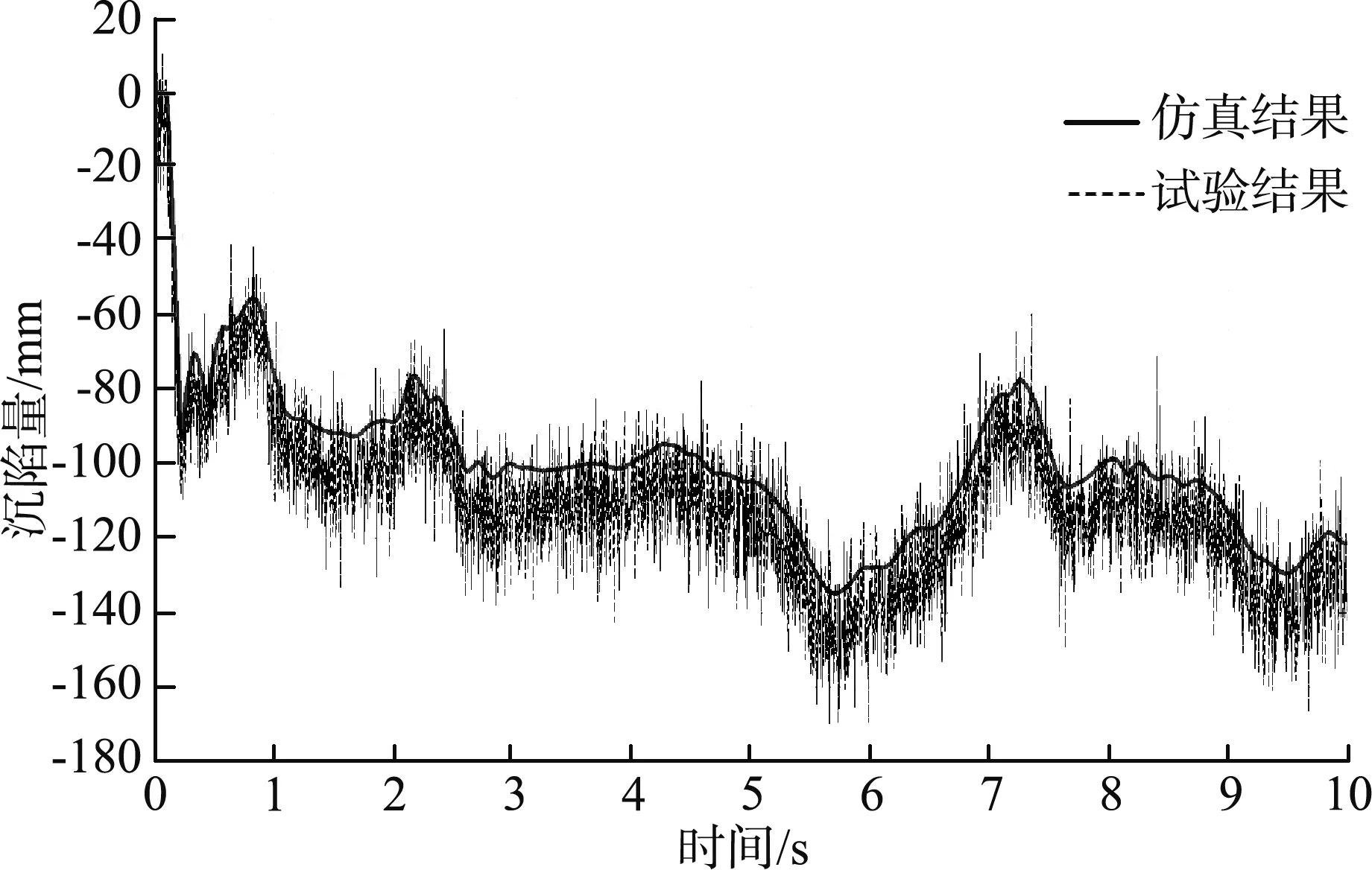
图7 第一负重轮沉陷量的仿真结果与试验结果Fig.7 Simulation and test results of the first road wheel’s subsidence
由图7可知,履带式农业装备在黏土壤土地面上作业时,由于黏土壤土力学特性及地面高程的变化,第一负重轮的沉陷量变化明显,其中,仿真结果的最大沉陷量为135 mm,试验结果的最大沉陷量为170 mm,均小于履带式农业装备的离地间隙280 mm,故该履带式农业装备能以5 km/h的速度通过该黏土壤土地面。第一负重轮的沉陷量除了取决于黏土壤土的力学特性外,还与黏土壤土的地面高程有关,黏土壤土地面低洼处,负重轮的沉陷量相对较大;黏土壤土地面较平整处,沉陷量相对较小,约为80~100 mm;第一负重轮沉陷量仿真结果的变化趋势与试验结果相似,试验结果值较仿真结果略有偏高,但误差在30%范围内。
5 结论
1) 本文以履带式农业装备黏土壤土的通过性为研究对象,通过土壤样本的土槽实验及地面高程信息的采集,构建了履带式农业装备黏土壤土通过性仿真分析模型,并以负重轮的沉陷量为评价指标,采用仿真分析和实车验证相结合的方法研究了履带式农业装备在该黏土壤土地面上的通过性。
2) 进行了黏土壤土的力学特性试验,利用摩尔—库伦定律计算得到黏土壤土的内聚力为9.69 kPa,内摩擦角为31.33°。
3) 以第一负重轮的沉陷量为评价指标,得出了履带式农业装备在黏土壤土地面作业时第一负重轮最大沉陷量仿真结果为135 mm、试验结果为170 mm,均小于履带式农业装备离地间隙的结论。
