深度嵌入度量学习的机械跨工况故障识别方法
2023-07-10韩特刘超沈长青史红梅司瑾蒋东翔
韩特 刘超 沈长青 史红梅 司瑾 蒋东翔


摘要 传统数据驱动的机械装备故障诊断方法依赖目标工况下的完备数据,而装备实际运行工况复杂多变,难以预测,且数据获取困难。针对上述问题,提出了一种深度嵌入度量网络(Deep Embedding Metric Network, DEMN)的机械跨工况故障识别方法,该方法利用装备在已知工况下的数据学习鲁棒特征表示,建立适用于未知工况场景下的泛化智能故障识别模型。基于多尺度卷积神经网络(Multiscale Convolutional Neural Network, MCNN)獲取故障信号的深度嵌入特征;用度量学习方法引导判别性特征学习,构建特征嵌入空间下的三元组损失(Triplet Loss, TL);利用粒子群算法(Particle Swarm Optimization, PSO)对间隔参数进行寻优。所提方法有效缩小装备健康状态类内距离、扩大类间距离,降低工况变化对健康状态映射关系的影响。实验结果表明,该方法在齿轮箱跨工况故障诊断实验中表现出良好的识别精度与泛化性能。
关键词 故障诊断; 齿轮箱; 卷积神经网络; 度量学习; 跨工况
引 言
机械装备如风力发电机、航空发动机等,正在朝着复杂化、精密化、大容量的方向发展。时变转速、复杂载荷以及大冲击扰动等恶劣运行工况极易引发各类故障,严重影响了装备的安全性和可靠性。开发具有实时数据处理、分析、决策的状态监测与故障诊断系统对于提高机械装备安全可靠性具有重要的意义[1]。
随着工业互联网技术的快速发展,传感器网络实时收集并存储机械装备运行数据,机械大数据的时代随之来临。近年来,结合数据驱动和人工智能技术的机械装备智能故障诊断理论方法得到了越来越广泛的研究与实践,为实时分析机械运行数据、监测装备健康状态提供了新的思路和解决途径[2?3]。其中,深度学习方法备受青睐。Zhao等[4]系统综述了基于深度学习模型的机械健康状态监测方法,并结合刀具磨损开展案例研究。Khan等[5]围绕深度学习在装备健康管理中的应用发表综述文章。尽管深度学习的成功案例被不断报道,但将其灵活应用于机械装备故障诊断中仍然任重道远。现有研究通常基于两个假设:①模型训练数据和布署场景中的测试数据遵从独立同分布;②可以获取大量典型标记的故障数据进行模型训练。
在工程实践中,上述假设往往难以成立,究其原因为机械装备运行工况复杂,如转速和负载多变。具体而言,① 机械监测物理量既携带了装备运行状态的信息,如性能和故障特征等,又包含工况信息。二者在监测信号中相互耦合。当运行工况发生改变,测试信号中的故障特征信息也随之变化[6],即数据故障特征分布发生漂移。故障诊断模型训练数据与目标工况下的测试数据之间独立同分布的假设很难满足;② 由于机械装备在实际运行环境中工况多变,诊断模型实际布署场景的运行工况未知且难以预测。目标工况下的可用数据获取困难,无法重新训练学习故障诊断模型。综上所述,机械装备复杂工况对智能故障诊断方法的有效性提出了挑战。亟需开展跨工况故障诊断方法研究,即在特定工况数据中构建诊断模型,并当工况发生改变时仍能够准确识别装备健康状态[7]。如何挖掘训练数据中的鲁棒特征表示,降低工况变化对健康状态映射关系的影响是跨工况故障诊断方法的核心问题。
为了打破智能故障诊断中训练数据与测试数据独立同分布的假设,开发适应于跨工况乃至跨领域的灵活智能故障诊断方法,基于迁移学习的智能故障诊断方法应运而生[8?9]。Lu等[10]首次在深度模型中考虑辅助域和目标域数据分布的最大均值差异(Maximum Mean Discrepancy, MMD)最小化,并在轴承与齿轮箱跨工况诊断实验中进行方法验证。Zhang等[11]利用Wasserstein距离评估轴承在不同转速下数据分布的差异,以对抗训练(Adversarial Training, AT)的方式学习领域不变性特征表示,实现了在跨工况场景下的轴承故障迁移诊断。Chen等[12]提出了一种领域对抗迁移网络(Domain Adversarial Transfer Network, DATN), 解决了旋转机械在不同转速条件和噪声环境下的跨工况故障诊断问题。迁移学习方法为不同工况下的诊断任务建立起桥梁,缓解模型对目标工况故障训练数据的依赖。但与此同时,该类方法在工程实践中依然存在一定局限性,即假设目标工况已知,且存在一定数据进行迁移学习,如少量标记故障数据或包含装备故障信息的无标记数据。
针对上述问题,本文将从泛化建模角度开展机械装备跨工况故障诊断方法研究。仅利用已知工况下的数据训练模型,重点关注模型在未知目标工况场景下的鲁棒性与泛化能力。提出了一种深度嵌入度量网络。在深度特征嵌入空间中,利用度量学习挖掘机械装备不同健康状态数据的内在判别结构,构建决策边界泛化的分类模型,准确识别未知目标工况下机械装备健康状态。
1 多尺度卷积神经网络
1.1 Inception单元模块
深度学习通过构建多层网络结构以获取高度非线性空间变换能力。卷积神经网络(Convolutional Neural Network, CNN)是深度学习中的最重要的模型之一。本文将在CNN框架下开展研究。CNN模型主要由前端卷积?池化模块f进行特征学习和提取,并由后端分类模块C进行识别。
传统CNN模型单个卷积层通常采用单一尺寸的卷积核。由于机械装备工况信息和故障信息的相互调制,工况变化会引起故障特征频率以及尺度的改变。单一尺度的卷积核无法有效捕获不同时间尺度下的故障特征表达,模型容易过拟合于特定工况训练数据。受GoogLeNet中的Inception单元启发[13],可以将多个不同尺寸的卷积核集成,对信号进行卷积操作和多尺度特征提取。不同卷积核的输出最后被级联,传送至下一层。其结构如图1所示,该模块分别采用了1×1,1×3和1×5的卷积核。值得注意的是:① 较大的卷积核适用于机械信号中的时间尺度较大的慢变分量,而较小的卷积核则能更加有效地提取信号中的瞬态成分;② 通道级联意味着不同尺度特征的融合;③ 使用1×1卷积核可以改变通道数,降低特征维度;④ 模块中通过嵌入最大池化操作,进一步增强模型鲁棒性。
1.2 基础网络模型设计
基于上述Inception单元的多尺度特征提取,本文设计了一种多尺度卷积神经网络,用于不同工况下的机械信号故障特征学习。网络输入为原始一维时域信号。CNN第一层作用类似于Gabor滤波器组,对原始信号在频域的不同尺度上进行特征提取。鉴于此,网络第一层采用16通道的1×128大尺寸卷积核,提取信号中体现故障本质特征,如冲击、谐波等信息,捕获中低频段低层特征[14]。然后,網络包含两个多尺度特征提取模块。由于经过第一层大尺寸卷积核的特征仍然具有较高维度,第一个多尺度特征提取模块首先分别采用1×31和1×15的长卷积核,然后采用1×5卷积核提取抽象特征组合。第二个多尺度特征提取模块采用了和Inception单元相同的参数设置。经过前端的多尺度特征提取,可以获取原始信号在深度模型中的特征嵌入。然后,采用全局平均池化(Global Average Pooling, GAP)对特征嵌入进行降维,并与输出层进行全连接,输出装备健康状态识别结果。所设计的网络结构及参数如图2所示。
2 深度嵌入度量学习故障诊断方法
2.1 深度嵌入度量损失优化
为了进一步建立对未知工况数据鲁棒的故障诊断模型,需要诱导深度网络学习具有强判别性和泛化能力的故障特征表示。本文考虑在深度特征嵌入空间下引入度量学习方法。利用已知工况训练数据和机械健康状态监督信息,优化得到新的特征嵌入空间,使得同类样本特征之间距离缩小,不同类样本特征差异增大。
在度量学习方法中,损失函数设计至关重要,其中,三元组损失应用较为广泛[15]。所谓三元组,即为包含锚点样本(anchor, xai)、正样本(positive, xpi)和负样本(negative, xni)的样本组(xai,xpi,xni)。其中,xai与xpi为同类样本,xai与xni不属于同类样本。通过构造上述三元组,并输入到深度学习模型中,获得高维空间下的深度特征嵌入(f(xai),f(xpi),f(xni)),其中f(?)表示将原始样本映射到特征嵌入空间的函数。模型优化将缩小f(xai)与f(xpi)的类内距离,扩大f(xai)与f(xni)的类间距离。该过程可以表示为:
式中 α表示间隔参数,保证三元组中类间距离大于类内距离。
对于给定训练数据,可以构造三元组集合,三元组损失定义如下:
式中 Ntr为三元组个数。
本质上,对于特定机械健康状态,工况变化致使的数据分别漂移可视为样本的类内差异。基于此,在深度特征嵌入空间下考虑三元组损失优化可以有效降低工况变化对特征分布的影响,建立决策边界泛化的诊断模型,优化过程如图3所示。
如何构造合适的三元组对于模型训练至关重要。对于遍历得到的三元组集合中,可以分为以下三类:① 简单三元组(Easy triplets):自然满足式(1);② 半难三元组(Semi?hard triplets):由下式定义:
③ 困难三元组(Hard triplets):由下式定义:
简单三元组对应的损失函数值为0,因此将忽略此类三元组,重点优化半难和困难三元组度量距离损失。
2.2 深度嵌入度量网络
在MCNN中考虑上述三元组损失,本文所提的DEMN模型结构如图4所示。通过多尺度特征提取,获得原始信号的深度特征嵌入,随后分别计算由分类器模块输出的交叉熵损失与三元组度量损失。网络总体损失函数定义如下:
式中 Lc为交叉熵损失项;Lt为三元组度量损失项,Lweight为网络参数正则化项,用以约束模型复杂度,避免过拟合;λ和μ为平衡系数,统一取0.01;θ为模型参数。交叉熵损失计算公式如下:
式中 N表示训练样本个数;Nc表示装备健康状态类别个数;(xi,yi)为训练样本和对应的健康状态标签;P(y?i=j|xi)为网络输出层预测样本xi属于第j类健康状态的概率。
2.3 度量间隔参数寻优
度量损失优化目标中虽然只有间隔参数α需要设定,但其选择直接影响模型性能。因此,本文利用粒子群算法(Particle Swarm Optimization, PSO)进行自适应参数寻优。
一般而言,适应度函数可以选用测试集样本准确率。由于跨工况故障诊断问题中的目标工况样本未知,需要利用已知训练数据构造适应度函数指导参数寻优。考虑到度量损失优化目标中的类内差异缩小、类间距离扩大可以有效降低模型分类诊断的不确定性,在交叉验证意义下,利用训练集样本健康状态概率分布的信息熵作为PSO算法的适应度函数。计算公式如下:
2.4 跨工况故障诊断方法流程
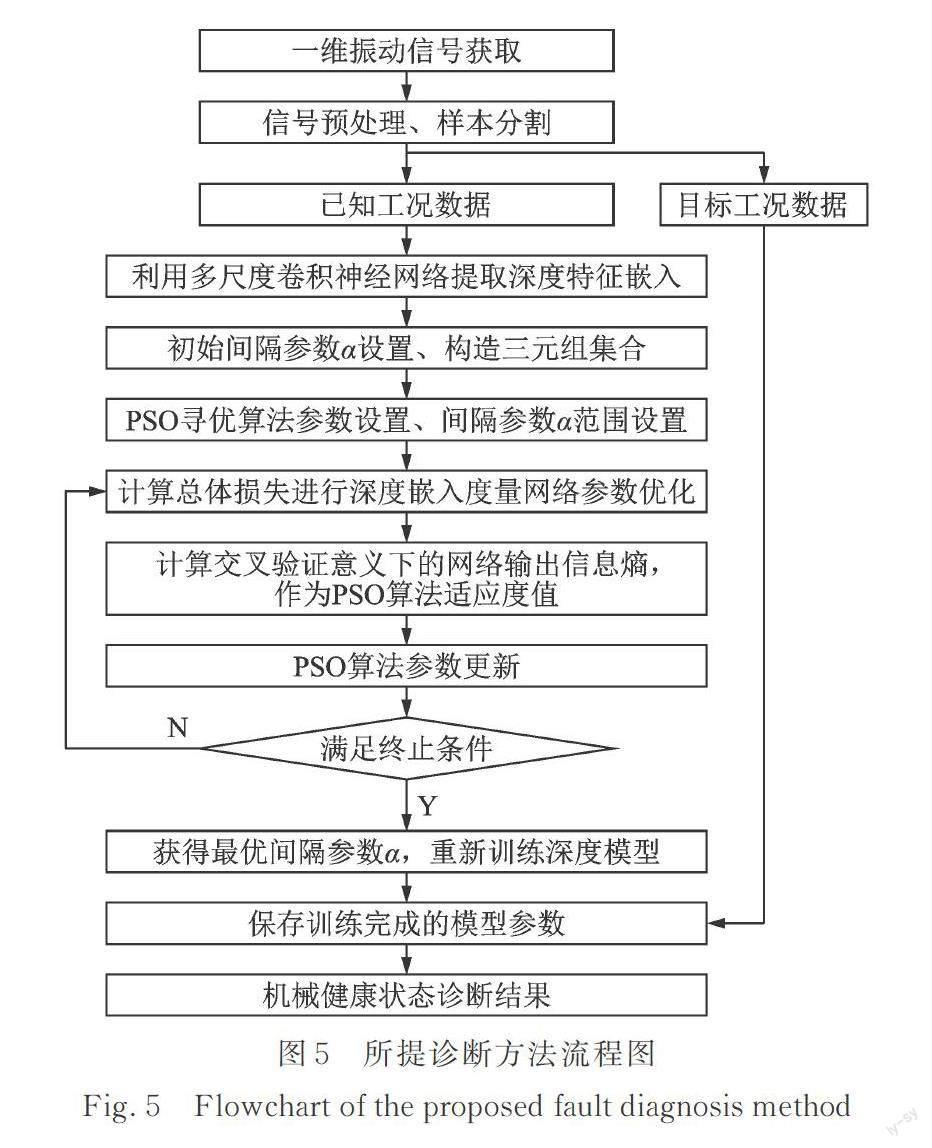
提出的深度嵌入度量学习故障诊断方法流程如图5所示,详细实验步骤如下:
(1) 利用振动传感器获取机械装备关键部件处的振动信号,并进行降噪、归一化等预处理。将振动信号切割成固定大小的样本,为输入DEMN做准备。
(2) 将已知工况条件下的数据用于模型训练。待模型训练完毕,测试样本为布署场景监测数据。实际布署场景运行工况未知,假设不同于训练数据来源工况。
(3) 利用一维多尺度卷积神经网络进行原始数据自适应特征提取,获取深度特征嵌入。
(4) 利用PSO算法对三元组损失中的间隔参数进行寻优。
(5) 基于获取的最优间隔参数,在已知工况数据中训练DEMN模型。
(6) 将目标工况下的测试样本输入训练完成的模型中,得到故障诊断结果。
3 齿轮箱故障诊断实验验证
为了验证本文提出的DEMN模型对机械跨工况故障识别的有效性与优越性,以工业齿轮箱为对象,分别采用预诊断与健康管理 (Prognostics and Health Management, PHM) 协会公开的定轴齿轮箱数据[16]、清华大学故障诊断实验室的HS?200行星齿轮箱数据[7]和HD?FD?03X转子齿轮故障模拟实验台的行星齿轮故障数据进行实验验证和对比分析。
3.1 跨工况故障诊断实验案例
PHM齿轮箱故障数据集:该数据集实验装置如图6所示。齿轮箱为两级直齿齿轮箱。齿轮箱振动信号由安装在箱体上的加速度传感器测量获得。本文选取靠近输出端的加速度信号进行分析。信号采样频率为66.67 kHz。经过预处理切割的单个样本包含4096采样点。齿轮箱输出轴转频分别为30,35,40,45和50 Hz。实验采集了8种齿轮箱健康状态下的运行数据,包括健康和7种故障类型,详细健康状态描述见参考文献[16]。
根据实验输入轴转速,设计了3个跨工况故障诊断实验E1~E3,如表1所示。以E1为例,表示利用40,45,50 Hz工况下的数据训练模型,利用30,35 Hz工况下数据测试模型效果。
清华大学齿轮箱故障数据集:第二个案例基于作者开展的行星齿轮箱故障模拟实验展开[7]。所采用的齿轮箱型号为HS?200减速机。该齿轮箱为单级行星齿轮结构,减速比为3.57。利用电机驱动齿轮箱,输出端连接风力机风轮作为负载。齿轮箱振动信号由箱体上水平和竖直方向的加速度传感器进行测量收集,信号采样频率为20 kHz。经过预处理切割的单个样本包含4096采样点。实验装置如图7所示。实验采集了9个不同健康状态的齿轮箱振动信号。齿轮箱健康状态描述如表2所示。齿轮箱输入轴转速范围为20~40 Hz,设计了2个跨工况故障诊断实验E4和E5,如表1所示。
北京交通大学齿轮箱故障数据集:第三个案例数据来源于北京交通大学轨道交通智能检测技术研究所的HD?FD?03X转子齿轮故障模拟实验台。实验装置如图8所示。齿轮箱由电机驱动,输出端负载由制动加载器提供。实验选取了齿轮箱上水平和竖直两个方向的加速度信号进行分析,信号采样频率为20 kHz。经过预处理切割的单个样本包含2048采样点。电机转速为2000 r/min,负载分别为0,3和5 N。实验对5种齿轮箱健康状态进行识别,分别为健康,太阳轮磨损,行星轮断齿,行星轮裂纹,行星轮点蚀。根据不同负载状态,设计了2个跨工况故障诊断实验E6和E7,如表1所示。
3.2 模型参数及对比研究
本文提出的DEMN由MCNN基础网络和深度嵌入度量损失优化模块组成。其中MCNN结构参数如图2所示,包括前段的大尺寸卷积核、2个多尺度特征提取模块以及分类模块。除最后一层激活函数使用Softmax外,其余各层均使用LeakyReLU。为了避免模型过拟合,在卷积层后加入Dropout。深度嵌入度量损失优化模块无网络结构参数。模型执行框架为PyTorch,优化器选择SGD,学习率为0.001,批量大小为32个样本,模型训练终止策略采用Early Stopping,Patience选择20。
为了验证DEMN模型的优越性,实验选取了四种典型故障诊断模型进行对比研究。详细介绍如下:① 基于大尺寸卷积核的CNN模型[14] (Deep CNN with Wide First?layer Kernels, WDCNN), 模型包含5个卷积层、5个池化层以及2层全连接,其中第一层卷积层采用大尺寸卷积核提高全局特征提取能力。② MCNN,为DEMN的基础网络。③ 残差网络[17] (Residual Network, ResNet),利用残差结构有效提高模型深度,增强模型故障特征学习能力,包含1个大尺寸卷积层,4个残差学习单元,3个全连接层。每个残差单元包含2层卷积。④ 胶囊网络[18] (Capsule Network, CapsuleNet),包含一系列向量神经元的胶囊结构,保证在特征映射中的时移不变性和特征表示中的同变性,在基于短时傅里叶变换时频图信号的轴承故障诊断中表现出良好的泛化能力。
3.3 实验结果与讨论
3.3.1 跨工况故障诊断实验结果分析
各方法在7个跨工况诊断实验中的故障识别结果如表3和图9所示。每次结果为5次随机实验的平均值和标准差。可以看出,所提DEMN在7个跨工况诊断实验中均表现出最优的识别精度。相比于基础MCNN网络,考虑了深度嵌入度量损失优化后,诊断准确率分别提高:19.2%,13.5%,5.2%,11.2%,13.2%,3.6%,7.3%。实验结果表明:考虑度量学习优化的深度特征嵌入具有更强的鲁棒性和抗工况干扰能力。因此,本文方法在处理跨工况故障诊断问题时具有良好的泛化能力。此外,MCNN的整体表现优于WDCNN,多尺度特征提取模块可以学習不同工况下更加本质的机械故障特征。对于另外两种深度学习模型,ResNet和CapsuleNet平均诊断准确率均在80%附近,较WDCNN和MCNN无明显优势,表明了现有深度学习模型在跨工况故障诊断问题中的局限性。
3.3.2 跨工况特征分布可视化
为了直观解释DEMN方法在跨工况故障诊断场景下的机理,本文利用t分布随机邻域嵌入(t?distributed Stochastic Neighbor Embedding, t?SNE)对深度特征嵌入空间向量进行降维,获得不同工况、不同健康状态下的数据特征分布。由于篇幅限制,仅对E1和E4展示特征分布可视化,结果如图10和11所示,其中□表示已知工况下训练样本,×表示目标工况下的测试样本。不同颜色代表齿轮箱不同健康状态。
通过分析图10和11可知:①在MCNN中,同类健康状态的已知工况训练样本和目标工况测试样本的特征分布出现明显漂移,即模型在训练样本中学习的故障特征表示无法有效避免工况干扰。例如,图10中状态3和状态4的训练与测试样本特征分布差异明显,且测试样本分布出现明显混叠。②通过引入度量损失优化,DEMN极大程度上缩小了已知工况数据特征分布的类内距离、扩大了类间距离。相比于MCNN,同类训练样本的聚集性,以及不同类样本的可分性得到进一步提升。③值得强调的是,DEMN有效消除了已知工况与目标工况样本特征分布的漂移。在无目标工况数据参与模型训练的前提下,基本实现迁移学习方法的预期目标。本质上,在已知工况训练数据特征嵌入空间下,类内距离缩小、类间距离扩大可以有效增强模型故障特征判别能力,提升决策边界泛化能力,进而降低工况变化对健康状态映射关系的影响。
图12采用混淆矩阵对DEMN诊断结果进行展示。以实验E1为例,状态4和状态5的部分样本被误识别,这与特征分布可视化结果一致,即在目标工况下两种健康状态的测试样本分布接近。总体而言,所提方法在齿轮箱跨工况故障诊断实验中表现出较高的诊断精度和良好的泛化性能,具有较强的工程实际应用价值。
3.3.3 间隔参数寻优对诊断结果影响
进一步对间隔参数α的选择进行讨论, PSO算法种群数量为50,迭代次数为20,惯性权重为0.9,学习因子为0.5和0.3,间隔参数α的优化区间为[0, 100]。在7个跨工况诊断实验中,分别以人工设定的间隔参数和经过PSO算法寻优后的间隔参数进行模型训练,得到的诊断结果在表4中给出。可以看出,本文方法可以有效选取最优间隔参数,指导三元组构建及深度模型训练,所提DEMN均取得最高的诊断准确率。
3.3.4 不同噪声环境下诊断结果分析
机械装备运行工况复杂,外部噪声往往对监测数据造成干扰。因此,需要验证本文方法在不同噪声环境下的泛化性能。对测试样本添加不同程度的高斯白噪声,其信噪比(Signal?to?Noise Ratio, SNR)范围为[0 dB, 30 dB],模型训练样本不变。以实验E1和E4为例,基础模型MCNN和所提DEMN结果对比如图13和14所示。
测试样本进一步加噪后,模型将同时面临转速、负载变化和噪声的干扰。训练样本与测试样本的分布漂移将进一步加剧。可以看出,随着噪声水平的提高,两种模型的精度都出现了不同程度的下降。相比于基础模型MCNN,所提DEMN依然可以抵制一定程度的噪声干扰,表现出较强的鲁棒性。以实验E4为例,随着SNR降低,MCNN平均识别准确率持续降低。而在[10 dB, 30 dB]范围内,DEMN表现稳定,识别准确率超过91%。在2 dB的低信噪比场景中,MCNN和DEMN识别准确率分别为57.7%和80.4%,较无噪声场景,模型精度下降比例分别为33.1%和17.5%,DEMN优势明显。上述结果表明,基于度量学习优化的深度特征嵌入空间在未知噪声环境具有更强的泛化能力。
4 结 论
针对机械装备工况变化致使的数据分布漂移问题,本文提出了一种深度嵌入度量学习的跨工况故障诊断方法。所提方法能够利用已知工况数据构建泛化诊断模型,解决机械装备实际运行工况多变且缺乏相应数据进行诊断模型训练的难题。主要结论如下:
(1) 在深度特征嵌入空间下优化度量学习损失,缩小特征类内距离,扩大类间差异有利于构建泛化决策边界,降低工况变化对故障映射关系的影响,有效提高模型在跨工况故障诊断任务中的识别精度。
(2) 通过PSO算法对度量间隔参数进行寻优,指导三元组构造及度量损失计算,增强网络的判别性特征学习能力。
(3) 在三个齿轮箱故障诊断案例中,相较于现有深度学习模型,所提DEMN在目标工况和噪声环境下取得了更优的故障识别精度和泛化性能。
参考文献
1周陈林, 董绍江, 李玲, 等. 滚动轴承多状态特征信息的改进型卷积神经网络故障诊断方法[J]. 振动工程学报, 2020, 33(4): 854-860.
ZHOU Chenlin, DONG Shaojiang, LI Ling, et al. Method to improve convolutional neural network in rolling bearing fault diagnosis with multi-state feature information[J]. Journal of Vibration Engineering, 2020, 33(4): 854-860.
2李霁蒲, 黄如意, 陈祝云, 等.一种用于主轴轴承故障诊断的深度卷积动态对抗迁移网络[J]. 振动工程学报, 2022, 35(2): 446-453.
LI Jipu, HUANG Ruyi, CHEN Zhuyun, et al. A deep convolutional dynamic adversarial transfer network for spindle bearing fault diagnosis[J]. Journal of Vibration Engineering, 2022, 35(2): 446-453.
3雷亞国, 贾峰, 孔德同, 等.大数据下机械智能故障诊断的机遇与挑战[J].机械工程学报, 2018, 54(5): 94-104.
LEI Yaguo, JIA Feng, KONG Detong, et al. Opportunities and challenges of machinery intelligent fault diagnosis in big data era[J]. Journal of Mechanical Engineering, 2018, 54(5): 94-104.
4ZHAO R, YAN R, CHEN Z, et al. Deep learning and its applications to machine health monitoring[J]. Mechanical Systems and Signal Processing, 2019, 115: 213-237.
5KHAN S, YAIRI T. A review on the application of deep learning in system health management[J]. Mechanical Systems and Signal Processing, 2018, 107: 241-265.
6赵明. 变转速下机械动态信息的自适应提取与状态评估[D]. 西安:西安交通大学, 2013.
ZHAO Ming. Adaptive dynamic information extraction and state evaluation for machinery under varying speeds[D]. Xi'an: Xi'an Jiaotong University, 2013.
7韩特. 基于深度迁移学习的旋转机械故障诊断方法研究[D]. 北京:清华大学, 2020.
HAN Te. Research on fault diagnosis method for rotating machinery based on deep transfer learning[D]. Beijing: Tsinghua University, 2020.
8沈飞, 陈超, 徐佳文, 等. 基于时间迁移模型的旋转机械实时故障诊断[J].仪器仪表学报, 2019, 40(10): 84-94.
SHEN Fei, CHEN Chao, XU Jiawen, et al. Time transfer model based rotating machine real-time fault diagnosis[J]. Chinese Journal of Scientific Instrument, 2019, 40(10): 84-94.
9YAN R, SHEN F, SUN C, et al. Knowledge transfer for rotary machine fault diagnosis[J]. IEEE Sensors Journal, 2019, 20:8374-8393.
10LU W, Liang B, Cheng Y. Deep model based domain adaptation for fault diagnosis[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 2296-2305.
11ZHANG M, WANG D, LU W, et al. A deep transfer model with Wasserstein distance guided multi-adversarial networks for bearing fault diagnosis under different working conditions[J]. IEEE Access, 2019, 7: 65303-65318.
12CHEN Z, HE G, LI J, et al. Domain adversarial transfer network for cross-domain fault diagnosis of rotary machinery[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(11): 8702-8712.
13Szegedy C, Ioffe S, Vanhoucke V, et al. Inception-v4: Inception-ResNet and the impact of residual connections on learning[C]. Proceedings of the AAAI Conference on Artificial Intelligence, AAAI 2017. Palo Alto, CA, USA, 2017: 4278-4284.
14ZHANG W, PENG G, LI C, et al. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals[J]. Sensors, 2017, 17(2): 425.
15Schroff F, Kalenichenko D, Philbin J. FaceNet: a unified embedding for face recognition and clustering[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2015: 815-823.
16Alatat H, Siegel D, Lee J. A systematic methodology for gearbox health assessment and fault classification[J]. International Journal of Prognostics and Health Management, 2011, 2(1): 16-22.
17YANG B, LEI Y, JIA F, et al. A polynomial kernel induced distance metric to improve deep transfer learning for fault diagnosis of machines[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9747?9757.
18ZHU Z, PENG G, CHEN Y, et al. A convolutional neural network based on a capsule network with strong generalization for bearing fault diagnosis[J]. Neurocomputing, 2019, 323: 62?75.
Deep embedding metric learning for machinery fault identification across different working conditions
HAN Te 1 ?LIU Chao 2 ?SHEN Chang-qing 3SHI Hong-mei 4SI Jin 4JIANG Dong-xiang 2
1. Department of Industrial Engineering, Tsinghua University, Beijing 100084, China;
2. Department of Energy and Power Engineering, Tsinghua University, Beijing 100084, China;
3. School of Rail Transportation, Soochow University, Suzhou 215131, China;
4. Key Laboratory of Vehicle Advanced Manufacturing, Measuring and Control Technology of Ministry of Education, Beijing Jiaotong University, Beijing 100044, China
Abstract The complete training data under target working conditions are necessary for the traditional data-driven fault diagnosis methods of machinery. However, the actual working conditions of mechanical equipment are complicated and difficult to predict, and thus it is difficult to obtain sufficient training data. To solve this problem,this paper proposed a deep embedding metric net?work(DEMN)for mechanical fault identification across different working conditions. The proposed method uses the data underknown working conditions to learn robust feature representation, and then establish the generalized fault diagnosis model for the unseen working conditions. First, the deep embedding features of fault signal are extracted by the multiscale convolutional neural network(MCNN). Then, the triplet loss-based metric learning objective is optimized to enhance the discriminant ability of classification boundary. Particle swarm optimization(PSO)algorithm is executed to the search the optimal margin in triplet loss. By facilitating the intra-class compactness and the inter-class separability, the influence of working condition changes to fault relationship mapping is significantly reduced. The experimental results show that the proposed method presents superior accuracy and generalization performance in gearbox fault diagnosis across different working conditions.
Keywords fault diagnosis; gearbox; convolutional neural network; metric learning; across working conditions
