基于边缘计算的动态称重系统实施与应用
2023-07-09林海叶思红
林海,叶思红
(湛江幼儿师范专科学校,广东湛江,524300)
随着我国的经济繁荣发展,公路建设也取得了不错的成绩,但是问题也随之而来,有不少人因为车辆超限超载引发的交通事故而丧命,近年来,国内一些研究学者设计了多种不停车动态称重系统及实施方案,大大地减少了治超检测的难度,提高了效率。本研究基于乡村振兴战略工程,使用AI 边缘计算技术,设计了基于边缘计算的动态称重系统,该系统使用Jetson Nano 人工智能嵌入式设备,采用人工智能算法,识别率高,速度快。具有一个云端多个终端、5G 网络连接、造价成本低,容易在县、乡等地区布控等特点。
1 相关工作
1.1 动态称重检测技术
目前,国内车辆超载检测技术聚焦在非现场执法的动态称重检测技术,多车桥梁动态称重算法[5],以Moses 轴重识别算法为基础,基于横桥向动力响应线和桥梁弯矩影响面,对单车以及多车过桥的横向位置及轴重等车辆信息进行识别;基于神经网络的车辆动态称重系统[6],采用神经网络自适应滤波变步长LMS 算法,能根据不同环境下针对不同车型进行检测,达到了较好的技术适应度;多车轴重识别的桥梁动态称重(BWIM)算法[7],搭建了包含9 层卷积层、2 层全连接层的卷积神经网络(CNN)模型,在单车和多车工况下的轴重识别误差均值基本低于5%,轴重识别效果良好且稳定;汽车动态称重系统的算法研究[8]对传感器在车辆非停车状态下的短历程信号进行分析,利用巴特沃斯低通滤波器滤除噪声信号中的高频分量优化算法进行最小二乘法拟合,能够提高动态称重系统的测量精度。虽然各种非现场执法的车辆动态称重检测技术已经不断地在提升,但是还存在数据实时性不高,响应速度慢的情况;检测称重系统相对复杂,车辆较多时容易出现误判,系统造价成本比较高,无法在经济比较落后地区的乡道、县道上布控。
1.2 AI 边缘计算平台
Jetson Nano 是英伟达发布的一款小型人工智能(AI)计算主板,GPU 为128 核 Maxwell,显存采用 64 位LPDDR4 25.6 GB/s 共4 GB,在嵌入式领域属于相对高端的产品,CPU 为4 核 ARM® A57 @ 1.43 GHz,有丰富的AI 和计算机视觉(Computer Vision)应用程序编程接口(API),视频编码能力为4K @ 30 | 4×1080p @ 30 | 9×720p @ 30(H.264/H.265),视频解码能力为4K @ 60 | 2×4K @ 30 |8×1080p @ 30 | 18×720p @ 30|(H.264/H.265)可以直接用于注重低功耗的AI 应用场景。
1.3 车牌识别PO-MTCNN+LPRNet
本研究车牌检测模块采用了Pytorch 深度学习框架,车牌区域检测使用我们提出的PO-MTCNN 改进型轻量级网络模型,MTCNN[9]是一种非常著名的实时检测模型,主要用于人脸识别。经过修改用于车牌检测。基于轻量化考虑去掉了网络结构中的Rnet 网络,经实验发现,在检测车牌这类简单图像区域的情况下跳过Rnet 不会损害准确性。在本次研究中只使用了候选网络(Pnet)和输出网络(Onet),通过大量的车牌区域目标检测数据集的训练和参数修改,最终确定PO-MTCNN 网络模型结构,如图1 所示。
Pnet 网络模块主要获得车牌区域的候选窗口和边界框的回归向量,并用该边界框做回归,对候选窗口进行校准,然后通过非极大值抑制(NMS)来合并高度重叠的候选框。Onet 网络模块与Pnet 类似,通过边界框的回归和NMS 来去掉假正例的区域。只是由于该网络结构和P-Net 网络结构有差异,多了一层卷积层和一个全连接层,所以会取得更好地抑制假正例的作用,处理的结果会更精细。Onet接受24(高度)x94(宽度)的BGR 图像,这与LPRNet 的输入一致。
车牌字符的识别采用LPRNet[10],它是另一种实时端到端DNN,该网络具有卓越的性能和低计算成本,无需初步字符分割。本研究还加入了空间变压器层,使其能更好地识别图像特征。
经过实验证明PO-MTCNN+LPRNet 具有足够好的鲁棒性,不会受各种相机参数,视角,光照等的影响,经过系统优化,加强了车牌纠错算法,并去掉了终端实时显示路况模块,减少了计算成本,与现有的车牌识别模块对比,提高了在复杂条件下的车牌识别率,置信度达到98%以上,车牌识别速度快,准确率高,适合在各种嵌入式平台上运行。
1.4 图像分类网络Mobilenet
MobileNetV3[11]是轻量型的图像分类网络,专注于移动或嵌入式设备的轻量级CNN,与传统的卷积神经网络相比,在精度降低较小的前提下,可以大大减少模型参数和计算量。通过硬件感知的架构搜索(NAS)的组合和NetAdapt 算法进行调整,以适应嵌入式CPU,然后通过新的体系结构改进进行改进,提高整体识别率。
2 整车动态称重系统设计
本系统能有效治理超载现象和对车流控进行管理。采用非现场执法动态称重检测设计,相对于目前的静态称重检测,不需要车辆停车,也不会引起交通阻塞。工控机系统使用边缘计算设备Jetson Nano 作为嵌入式AI 边缘计算平台,与目前使用的X86 架构的集显工控机相比算力更强大。边缘计算设备减少了数据在网络中传输的时间,简化网络结构,数据的分析和决策都交由边缘节点进行处理。车型分类模块采用轻量型Mobilenet V3 算法,与目前的车辆外廓尺寸检测模块相比较具有结构简单、检测距离远、速度快、计算成本低等特点。车牌检测模块采用POMTCNN+LPRNet 算法,系统使用一个云端即可连接多个终端系统。
2.1 系统结构
系统终端主要由称重模块、隔离装置、边缘计算摄像头三部分组成,结构简单,稳定性高,如图2 所示。称重模块采用先进的压电石英传感器,隔离装置包含12V 的独立供电模块和数字重量变送器,数字重量变送器是通过数模转换,把压力的模拟信号转换成数字信号。具体指标为综合精度1/100000,输入范围0.4~6mV/V,激励电压 5VDC,通讯接口RS485。
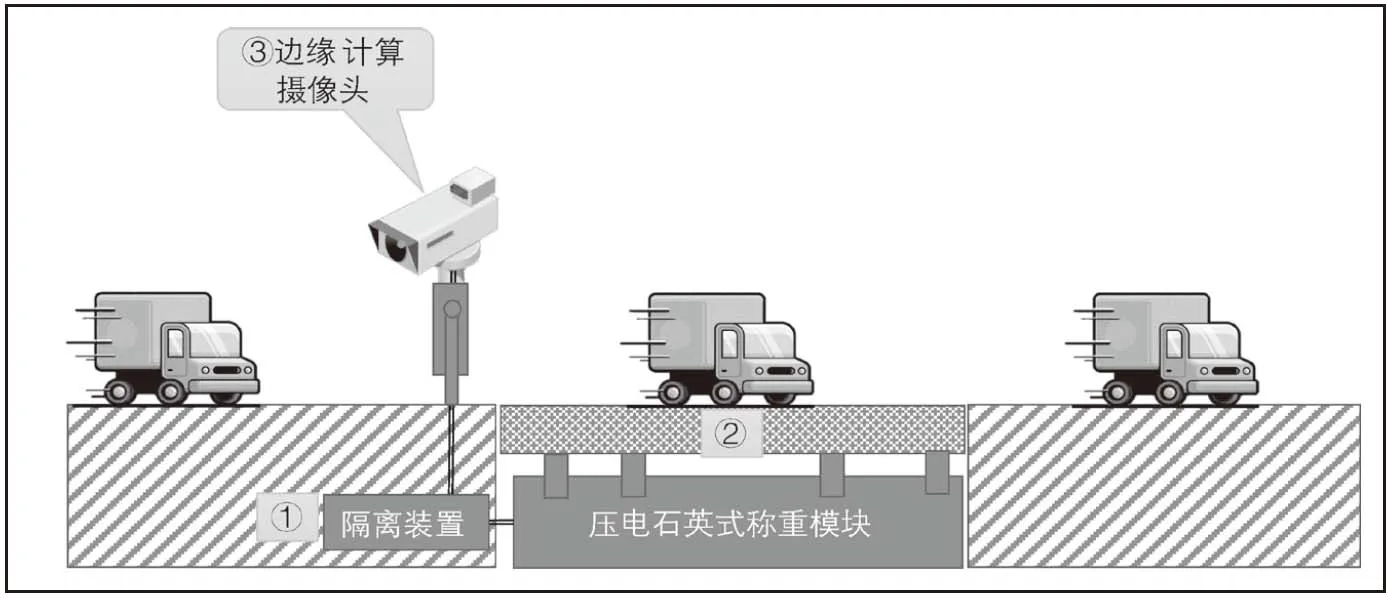
图2 系统终端结构
边缘计算摄像头是整体系统的核心组成部分,主要由Jetson Nano 嵌入式AI 边缘计算平台、CSI 摄像头(IMX219)、RS485 转USB 模块等组成。Jetson Nano 采用Ubuntu18 操作系统,Pytorch 深度学习框架,Python 编程。CSI 摄像头(IMX219)参数指标为分辨率800W(3280X2464),CMOS 尺寸1/4 英寸,光圈2.0,焦距2.96mm,对焦视场角77°,畸变<1%。
系统云端使用WINSERVER 服务器、动态网页技术、数据库管理技术实现智慧公路大屏管理系统。WINSERVER服务器参数指标为CPU 主频 2.4G 10 核心20 线程,内存ECC DDR4 2933,固态硬盘2T。
2.2 终端技术路线
首次启动时JetsonNano 检测称重模块和拍照模块是否正常。如果正常则摄像头开始实时监控车辆。POMTCNN+LPRNet 算法是正确率在95%以上的深度学习算法,为了保证车牌信息识别的置信度,我们采用连续拍照采集和识别的方法来进一步提高正确率。当车辆经过时,系统通过PO-MTCNN+LPRNet 算法获取第一个车牌信息为χ1,然后每间隔0.1 秒,通过摄像头采集一张车辆照片,连续采集10 张,再通过PO-MTCNN+LPRNet 算法获取到的车牌信息分别为χ2,χ3,χ4……χ11,再把11个车牌信息χ1,χ2,χ3,χ4……χ11,加入到列表θ,通过列表求得相同元素最多的车牌信息为χn,作为最终的车牌号码信息。最后保存车辆实时照片及车牌信息。整体识别时间平均为1.3 秒,车牌置信度平均为98%。
接下来,车辆经过称重模块,系统通过USB 口读取压力传感器称出的车辆重量信息,当车前轮刚接触称重模块时,设置时间变量β1,当前获取的重量值为μ,最高重量值为φ,随着车辆不断地前进,β值在增加,μ值也不断地在增加时,车重公式为:
当称重模块检测到μ<φ时,φ值不更新,直到μ=0 时,取得时间变量β2,设置称量模块的总长为γ,车速ψ为:
由于采用整车式称重方式,称重模块结构简单,出错率低,而且可以同时测出车辆的行驶速度。
最后,使用轻量型图像分类网络Mobilenet V3 对保存的车辆实时照片进行车型判断。接着系统将车辆照片、车牌号、车重、车型等车辆信息通过MQTT 协议发送到云端,当云端FTP 连接正常时,通过FTP 协议将车辆信息文件发送到云端服务器。上传成功后,摄像头继续实时监控车辆。系统流程图如图3 所示。
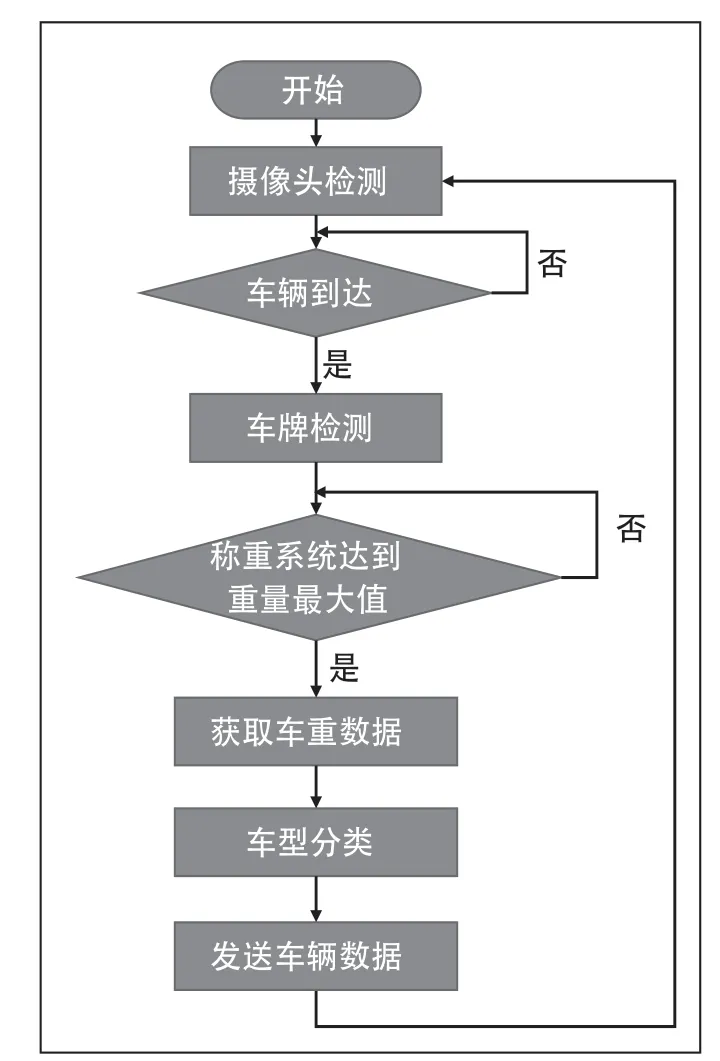
图3 终端技术路线
2.3 云端技术路线
云端服务器每隔15 秒检测是否有监控点车辆信息的数据文件上传,如果有,就会将数据文件里的车辆图片、车重、车型、车牌号码等数据解密拆分,分别存入云端数据库记录中。经过IIS 信息服务,就可以在动态网页端和移动端APP实时显示当前通过车辆,超载车辆的现场图片,并能对指定时间内的车辆数据进行汇总,显示超载车辆,车流量、车型等数据。系统运行流程图如图4 所示。
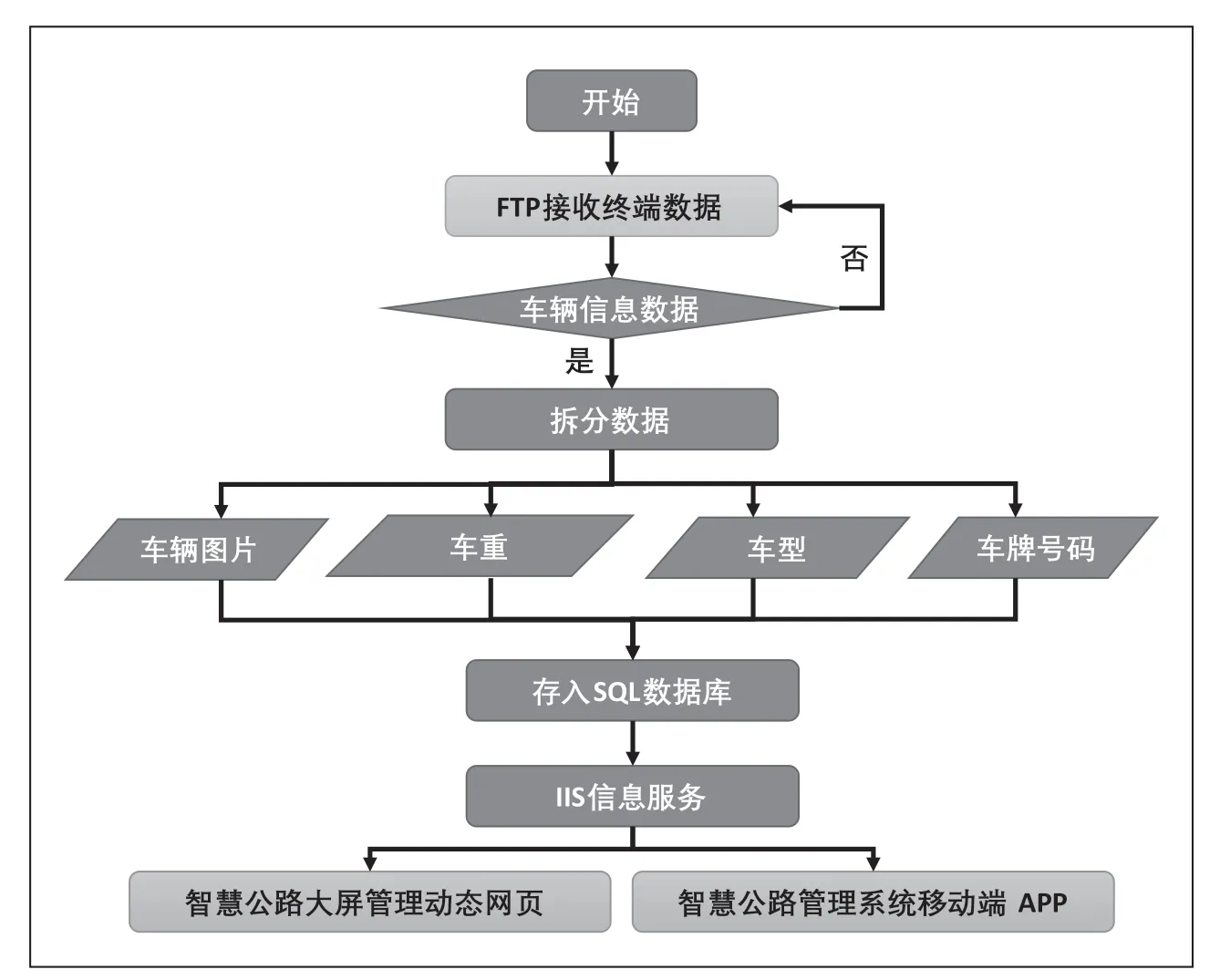
图4 云端技术路线
3 实验内容
实验平台采用Jetson Nano 4G,CSI 摄像头,使用轮辐式压力传感器做称重模块,记录不同的车辆和车速经过检测点的数据,实验数据如表1 所示。

表1
从表1 的数据可知,整个系统的正确率很高,称重检测模块在车辆低速经过时,正确率最高,耗时最长,这主要是由于系统采用整车称重设计,车辆要完全在称重模块内才能达到最大重量,称重检测模块的平均正确率在98.76%。车牌检测模块随着车速不断地增加,摄像头捉拍到高清图像的难度增加,为了保证检测的正确率在98%以上,需要经过多轮的检测,因此耗时也随着车速的增加而加长,平均检测耗时为1.27 秒。车型检测是在车牌检测之后,由于车速的增加,所获取的图像质量略有下降,平均正确率为94.96%,车型分类只对采集后的图像进行识别,因此耗时保持不变为0.5 秒。
4 结论
通过上述的实验数据表明,基于边缘计算的整车动态称重系统在车辆的称重检测、车牌识别、车型分类方面与现有的技术对比,具有系统响应速度快,正确率高的特点,能完全满足检测要求。而且结构简单、易于维护、造价成本低、采用5G 无线网络连接、一云端多终端,适合在县乡公路布控。实现了车辆在不停车的状况下的超限超载检测,大大提高了公路运输载重检测效率,可从根源上降低了车辆超限超载对路面造成的损伤和人员伤亡的情况,提升公路运输效率,保护人民生命财产安全。