空间环境下航天器含间隙机构动力学研究进展
2023-07-06任杰超张静宇
任杰超,张静宇,魏 强,2*
(1.河北工业大学 河北省跨尺度智能装备技术重点实验室;2.河北工业大学 省部共建电工装备可靠性与智能化国家重点实验室:天津 300401)
0 引言
机械系统是由若干零件通过运动副连接而成。为了实现零件之间的相对运动,运动副一般会设计出合适的间隙。零件的加工、装配误差和机械运转过程中的磨损会导致运动副间隙发生不规则变化。不合理的运动副间隙不仅会消除运动副处的部分约束,使机构的实际运动轨迹偏离预定轨迹,降低运动精度,还会引发运动副处的碰撞冲击,进而影响机构整体的运行稳定性;此外,间隙引起的冲击载荷会加剧运动副的磨损,影响机械系统的使用寿命[1-2]。因此,间隙对机械系统工作性能和服役可靠性的影响不容忽视。
在空间环境的各种极端条件下,间隙对空间机构的运动精度、运行稳定性的影响更加显著。例如:20 世纪90 年代,美国的“哈勃”太空望远镜在轨部署后不久,其太阳电池板连接处的间隙导致了吊杆振动以及卷筒和撑杆的黏滑,继而引发了远大于设计限值的扰动[3]。我国的“东方红三号”卫星在轨运行过程中受机构间隙影响出现了无法抑制的颤振现象[4]。此外,研究人员在“卡西尼”土星探测器的模态试验中发现,偏移间隙产生的非线性动力学特性会造成很大程度的频率漂移[5]。对于一些结构复杂、含有多个运动关节的空间机构,空间环境对其动力学特性的影响更不容忽视,且已成为航天器在轨稳定运行和长期服役的关键课题之一。
本文对空间环境下航天器含间隙机构的动力学研究进展进行综述,包括间隙建模方法、间隙对机构动力学特性的影响分析及其地面模拟实验,着重分析航天器含间隙机构的磨损与润滑特性研究,并在此基础上提出未来空间环境下航天器含间隙机构动力学领域的重点研究方向,旨在为含间隙机构动力学研究以及航天器设计提供参考。
1 含间隙机构动力学建模方法
含间隙机构动力学研究需解决的最基础问题是如何描述间隙处的构件运动,即对间隙进行建模。自20 世纪70 年代至今,已逐渐形成了二状态模型、连续接触模型和三状态模型3 种常用的含间隙机构动力学建模方法。
1.1 二状态模型
1971 年,Dubowsky 等[6]提出了碰撞铰模型,又称为“接触-自由”二状态模型,用以描述间隙关节处的运动行为(如图1 所示)。该模型认为间隙运动副处的构件之间存在接触和自由两种运动状态,处于接触状态时构件间产生接触力约束,处于自由状态时失去约束,可通过计算构件之间的距离来判断其运动状态。二状态模型主要以牛顿力学为基础,建立各个构件的运动方程[7]。
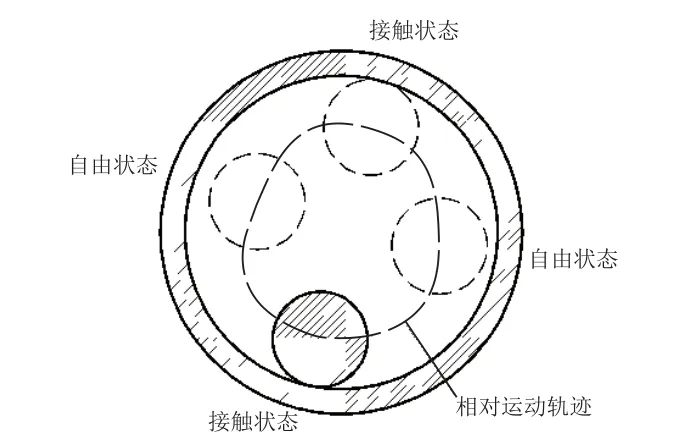
图1 二状态模型Fig.1 Two-state model
Dubowsky 等[8]用二状态模型描述了间隙处构件之间的受力情况。王国庆等[9]利用非线性接触力和非线性阻尼解决了碰撞铰模型中“变形量为0 时接触力不为0”的问题,进一步发展和完善了二状态模型。在应用方面,You 等[10]利用二状态模型研究了含间隙柔性卫星天线系统的动力学响应,通过对比模型计算结果和ADAMS 仿真结果,发现二者间的偏差仅为0.05%,说明二状态模型能精确反映间隙处在微重力条件下的接触碰撞规律。Zhang 等[11]在二状态模型和拉格朗日乘子方程的基础上,引入Bai 等[12]提出的非线性连续接触力模型描述关节碰撞力,进而研究了关节间隙对航天器整体运动姿态和太阳电池板展开性能的影响。张建超等[13]基于二状态模型和ADAMS 仿真,研究了曲柄转速和间隙尺寸对压力机下死点精度的影响。
二状态模型计入接触表面的弹性和阻尼,能较真实地反映出间隙处构件之间的碰撞冲击特性,但是求解时要时刻判断构件之间的运动状态,计算过程烦琐,尤其是对于多间隙机构,由于构件之间的运动状态非常复杂,故难以求得稳态解。
1.2 连续接触模型
为了更方便地描述间隙并简化计算过程,Earles等[14]于1973 年提出了连续接触模型,其假设构件一直处于接触状态,即认为构件发生分离碰撞的时间极短。该模型用无质量的刚性杆代替间隙,并假设构件之间无接触变形,进而将含间隙机构转化为无间隙的多自由度机构,如图2 所示。连续接触模型主要采用拉格朗日方程来建立系统的运动方程[7],从能量的角度出发,通过广义坐标建立最少数量的运动方程,形式简单,易于求解。
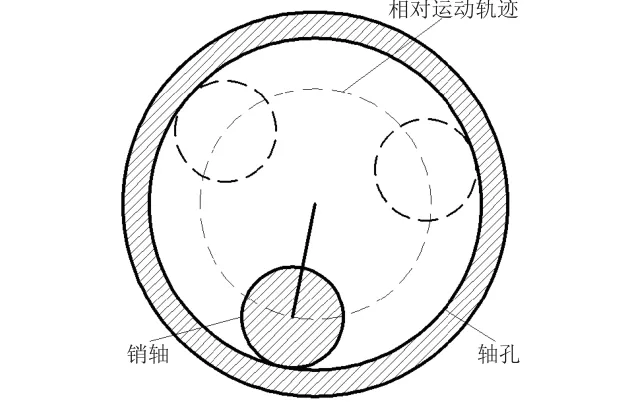
图2 连续接触模型Fig.2 Continuous contact model
1.3 三状态模型
为了更准确地描述间隙处构件间的运动状态,Miedema[23]在二状态模型的基础上提出了“接触-自由-碰撞”三状态模型。相较于二状态模型,该模型增加了碰撞状态,利用动量定理和恢复系数计算构件碰撞前后的速度变化。Soong 等[24]在实验中发现,碰撞状态结束后销轴和轴孔要经历很多次越来越小的碰撞才能回到接触状态,并把这些小碰撞称为过渡阶段,完善了三状态模型,如图3 所示。三状态模型通常用拉格朗日方程来建立系统的运动方程[7]。
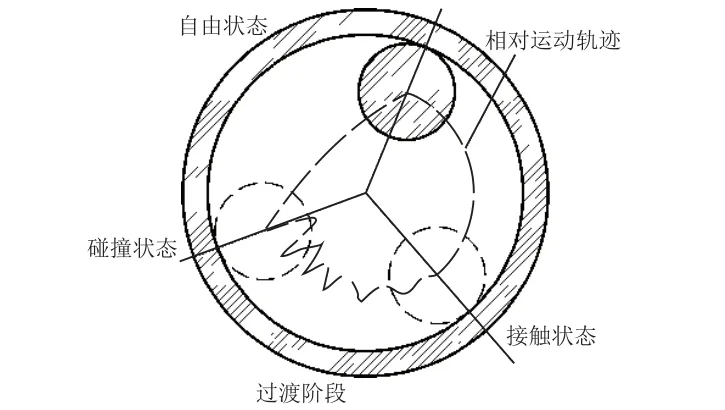
图3 三状态模型Fig.3 Three-state model
为了使模型更加准确,Li Z 等[15]对上述连续接触模型进行改进,并通过数值求解验证了其改进模型的有效性。在使用拉格朗日方程分析四杆机构、曲柄滑块机构这类闭环系统时,方程可能表现出高度的非线性[16]。Marques 等[16]对比分析了拉格朗日方程对闭环运动链建模的几种不同方法,将闭环运动链转化为开环运动链求解,降低了方程的非线性程度,拓展了连续接触模型的应用范围。在连续接触模型的应用方面,Erkaya 等[17-19]利用该模型研究了含间隙四杆机构和含间隙曲柄滑块机构的动力学特性,并利用神经网络和遗传算法改进设计,减小了间隙机构的输出误差和振动。Tsai 等[20]基于连续接触模型开发了一种可用于含间隙平面多回路机构的误差分析方法。刘福才等[21]以曲柄摇杆机构为例,利用连续接触模型和ADAMS 软件仿真分析了不同重力环境下含间隙旋转副构件之间的运动行为。冯志友等[22]建立了含4 个间隙的曲柄摇杆机构的动力学方程,指出连续接触模型同样适用于研究多间隙机构的动态特性。
连续接触模型简化了间隙处的构件运动,忽略了碰撞与冲击,计算效率高,能较好地反映机构的运动规律,方便用于多间隙机构的运动描述。但该模型过于简化,无法描述构件之间的碰撞冲击;而当间隙较大时,间隙处构件之间的接触时间变短,自由状态不能被忽略。因此,该模型只适用于小间隙的情况。
在三状态模型的应用方面,Rhee 等[25]基于三状态模型和拉格朗日方程,研究了含单个间隙的刚性四杆机构的动态响应;数值计算结果表明,间隙机构具有明显的非线性动力学行为,但随着摩擦系数的增大,机构中的非线性和混沌现象越来越弱,动力学响应表现出简单的周期性。陈锐博[26]在三状态模型的基础上,利用ADAMS 仿真软件研究了含间隙曲柄滑块机构的动力学响应。
三状态模型较真实地反映了间隙处构件的运动,与实验结果吻合良好[24],但碰撞时间无法确定,不能直接计算出碰撞时的冲击力,难以准确辨别运动状态的变化,而且计算不稳定,所以实际应用较少。
1.4 小结
表1 为以上3 种间隙系统建模方法的对比,实际应用时应综合考虑计算精度、计算效率,以及间隙的尺寸和数量等因素,选择合适的建模方法。

表1 三种间隙建模方法对比Table 1 Comparison of three modeling methods for clearance
2 航天器含间隙机构的动力学特性研究
由于航天器特殊的使用要求和运行环境,其机构中普遍存在的运动副间隙成为影响系统性能及动力学特性的关键因素之一[1]。因此,在各种建模方法的基础上,国内外学者深入研究了间隙对航天器动力学特性的影响。
2.1 间隙对机构动力学特性的影响
2.1.1 研究现状
现有关于航天器含间隙机构的动力学研究主要集中于太阳电池阵 [11,27-34]、空间机械手[35]和卫星天线装置[10,36]等部件。
太阳电池阵(如图4[27]所示)是航天器的主要供能装置,通常在发射过程中为折叠状态,入轨后释放展开并对日定向。Zhang 等[11]结合二状态模型和拉格朗日乘子方程研究了铰链处的间隙对太阳电池板展开响应的影响,指出间隙的存在会引发冲击动载荷(如图5[11]所示),从而影响太阳电池板的展开精度和稳定性甚至导致其损坏和失效。Li Y 等[28]应用ADAMS 仿真研究了扭矩弹簧、绳索联动机构和锁定机构等太阳电池阵部件对含间隙太阳电池板的整机动力学特性的影响,为设计太阳电池阵相关部件提供了重要依据。Li H Q 等[29]基于二状态模型,利用Jourdain 速度变化原理建立并求解了含间隙太阳电池阵列系统的动力学方程,详细分析了间隙对可展开桅杆、上容器和子面板动力学特性的影响。考虑到电池板的柔性,Li Y 等[30-31]建立了刚柔耦合的含间隙太阳电池板的动力学模型,并利用ADAMS 仿真验证了该模型的有效性,研究结果表明,柔性太阳电池板的弹性振动会增大间隙运动副处的碰撞频率,加剧系统的振动。对于含有多个间隙的机械系统,其表现出的动力学特性往往更加复杂。Li Y 等[30]指出多间隙机构的动力学响应并不是多个单间隙机构动力学响应的简单叠加。谷勇霞等[32]在二状态模型的基础上,通过ADAMS 动力学分析发现,间隙数量的增多会加剧运动副处的碰撞冲击,降低系统的稳定性;且间隙位置越靠近系统根部,对整机动力学特性的影响越显著。此外,学者们还研究了摩擦力对含间隙系统动力学特性的影响。白争锋等[33]将非线性等效弹簧阻尼模型和Coulomb 摩擦模型嵌入到ADAMS 动力学分析软件中,仿真分析了含间隙太阳电池阵的展开过程,发现间隙的存在和扩大都会导致关节碰撞力的增大,而增大摩擦有助于抑制关节碰撞。Li J 等[34]的研究也证明摩擦的存在有助于抑制间隙引发的振动冲击,有利于保持系统的稳定。
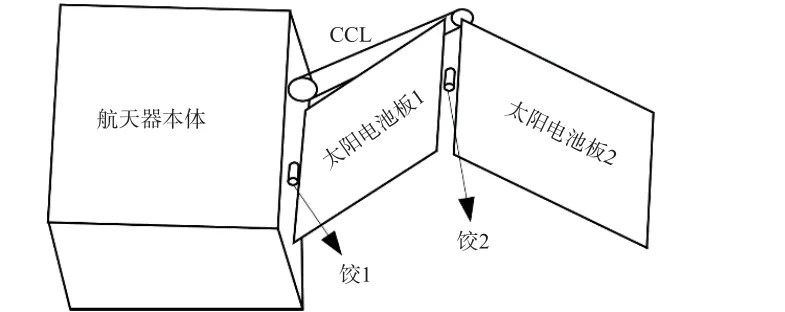
图4 太阳电池阵结构示意[27]Fig.4 Schematic diagram of solar array structure[27]
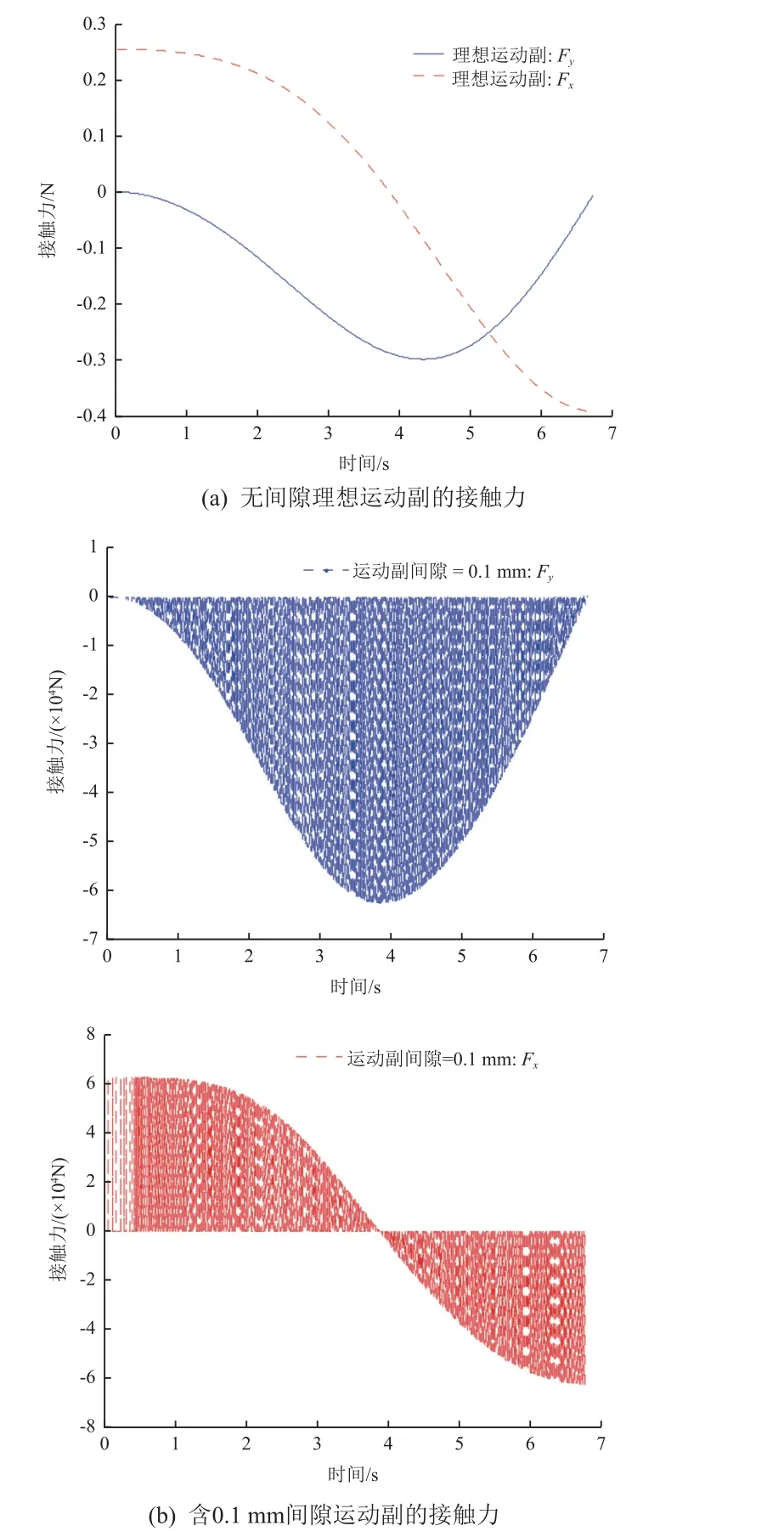
图5 运动副的接触力[11]Fig.5 Contact force in joint[11]
对于空间机械手和卫星天线等空间机构,相应的研究主要有:Zhao 等[35]将非线性阻尼模型引入二状态模型,分析了具有关节间隙的空间机械手的动力学特性,发现间隙对机械手角位移、角速度、角加速度的影响依次递增,且间隙尺寸越大所引起的关节碰撞力越大、碰撞频率越低;You 等[10]将弹性偏转视作线性振动,利用二状态模型研究了含间隙柔性卫星天线系统的动力学响应,发现随着运行时间的推移,卫星天线的指向精度越来越差,并归因于柔性天线对间隙的敏感性;张慧博等[36]研究了卫星天线的含间隙双轴驱动机构的动力学特性,基于多组不同间隙的仿真结果,分别拟合出运动副间隙尺寸和速度误差、加速度误差、振动频率以及接触力之间的函数关系,为间隙机构动力学分析提供了便利;潘冬等[37]基于三状态模型,用虚拟样机仿真的方法研究了铰间隙对卫星系统动态特性的影响,证明了间隙会降低卫星系统的定位精度和运行稳定性,并加剧反作用轮的磨损,降低其使用寿命;Li J等[38]基于蒙特卡罗方法研究了运动副间隙和参数不确定性对空间可展开机构的运动精度和动力学特性的影响。
2.1.2 小结与建议
上述研究分别考虑了间隙位置、间隙数量和构件柔性等因素的影响,较为全面地分析了空间环境下含间隙空间机构的动力学特性。但现有研究大多假设运动副表面连续光滑,忽略了运动副的真实粗糙接触表面,不利于机械系统的精细化分析,因此,还需进一步开展计入运动副粗糙表面的含间隙机构动力学研究。
2.2 航天器含间隙机构地面模拟实验研究
2.2.1 研究现状
为更好地预测航天器含间隙机构的在轨动力学行为,可在地面进行相应的环境模拟实验,其中的微重力模拟实验主要采取重力补偿[39]的方式进行。
李君兰等[40]进行了太阳电池板在不同安装方式下的振动试验(如图6[40]所示),通过不同的重力方向来模拟微重力。研究结果表明,重力势的不同导致太阳电池板附加刚度发生变化,从而影响其振动的峰值频率。荀剑等[41]对比分析了太阳电池板水平安装(正常重力)和垂直安装(微重力)时的加速度信号,发现重力变化对其振动的带宽、衰减都有很大影响。兰会[42]搭建了重力取向旋转台(见图7[42]),实验研究了不同重力环境下含间隙曲柄摇杆机构和含间隙二连杆机构的运动特性,其本质也是通过不同的重力取向来模拟微重力。高琳琪[43]用同样的方法实时测量不同重力条件下太阳电池板含间隙旋转副处轴颈的运动轨迹,研究了间隙对机构运动特性的影响。

图6 以太阳电池板的不同安装方式模拟重力变化[40]Fig.6 Gravity change simulation using different installing ways of solar panels [40]

图7 重力取向旋转台[42]Fig.7 Gravity-oriented rotary table[42]
垂直安装的重力补偿方法是将航天器偏转90°,这可能会导致器上某些精密元器件出现位置偏差,从而影响实验结果[44]。因此,需研究水平安装情况下的重力补偿方法。
陈鹿民等[45]搭建了平面可展开桁架实验装置,通过橡胶绳悬吊的方式来补偿重力,然后使桁架在水平面内展开;分析结果发现,在航天器可展开机构的铰连接中施加预载荷,可以有效抑制振动,并提高定位精度。侯鹏等[44]用多点、多自由度配重的方法来抵消重力(如图8[44]所示),开展了太阳电池板水平展开的地面模拟实验,实验结果与微重力仿真结果相吻合。乔国勇[46]详细叙述了太阳电池板物理样机和微重力实验台的设计过程,同样用悬吊法来模拟微重力环境,测试了月球车含间隙太阳电池板的重复展开性能。邱雪松等[47]采用悬吊法进行微重力补偿,通过实验研究了含间隙太阳电池板的末端位姿精度和重复展开性能,指出间隙尺寸与太阳电池板末端位姿误差近似成正比例关系,而太阳电池板的柔性有助于补偿间隙引起的误差。徐虎荣[48]搭建了周边桁架式可展开天线的微重力实验平台(如图9[48]所示),同样利用悬吊法抵消重力,研究了含间隙星载天线的展开精度,为准确预测天线在轨展开过程的动力学行为提供了重要参考。Xi 等[49]指出铰链的动刚度系数对其动力学特性有重要影响,继而实验研究了环形桁架天线展开过程中含间隙铰链处的动刚度变化。谷勇霞等[50]基于悬吊法搭建了含间隙关节的空间机械臂实验台(如图10[50]所示),通过仿真与实验相结合的方法研究了含间隙空间机械臂的振动特性。

图8 太阳电池板水平展开实验方法[44]Fig.8 Horizontal deployment experimental method for solar panels[44]
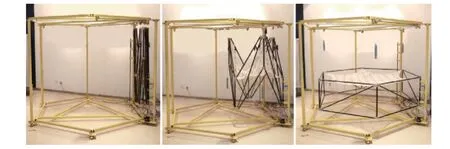
图9 周边桁架式天线展开实验装置[48]Fig.9 Perimeter-truss antenna deployment experimental setup[48]
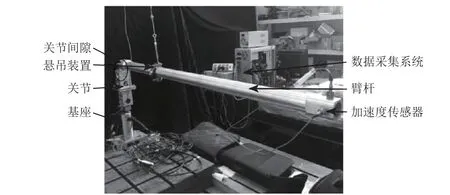
图10 含间隙关节的空间机械臂实验台[50]Fig.10 Spatial robotic arm bench with clearance joints[50]
2.2.2 小结与建议
上述实验工作都只考虑了微重力的影响,而忽视了空间环境中极端温度变化及空间辐射等因素。因此,在地面进行的含间隙空间机构的空间环境模拟实验研究还需进一步完善。另外,除悬吊法、调整重力取向法外,还有飞机抛物线法、落塔法、水浮法和气浮法等微重力模拟方法[42]有待应用于含间隙空间机构的动力学研究。
3 航天器含间隙机构的磨损与润滑特性研究
3.1 研究现状
航天器长期运行过程中,间隙运动副处的碰撞冲击会导致其磨损,使其表面形状和尺寸发生不规则变化,进而使机构的动力学特性变得更加复杂。为了减轻磨损,减小摩擦,提高航天器运行的稳定性,一般都会在机械运动副中加入润滑材料。因此,含间隙机构的磨损与润滑特性成为间隙动力学领域的研究热点。
空间微重力环境下的机构磨损特性和正常重力环境下的有很大区别。屈盛官等[51]研究了不同重力环境下轴承的磨损情况(见图11[51]),指出在正常重力环境下的磨损往往集中于某些特定区域,即出现所谓的“偏磨现象”[52-53],而微重力条件下的磨损趋于整周分布。赵阳等[54]研究了含间隙卫星天线双轴驱动机构的磨损特性,指出间隙引起的内碰撞加剧了磨损,而且磨损量的变化呈现出明显的不规则性。张慧博等[55]同样以卫星天线双轴驱动机构为研究对象,在二状态模型的基础上进行动力学仿真,发现磨损率随间隙的增大而增大(如图12[55]所示)。王福亚[56]也进行了类似的研究。
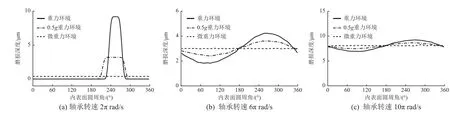
图11 不同重力环境下轴承内表面的磨损深度[51]Fig.11 Bearing wear depth under different gravity environments [51]
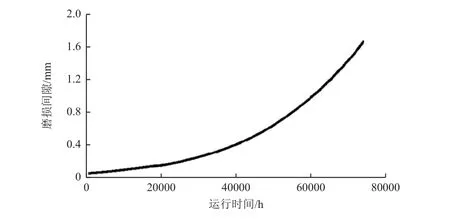
图12 含间隙卫星天线双轴驱动机构磨损率的变化[55]Fig.12 Changes in wear rate of dual axis drive mechanism for satellite antennas with joint clearance[55]
韩雪艳等[57]利用Archard 磨损模型研究了含间隙二维指向机构的非均匀磨损情况,通过对比分析磨损前后机构动力学特性的变化,发现磨损使摩擦力急剧增加,降低了机构的稳定性;并采用拟合函数的方法预测了机构的磨损寿命。此外,空间环境中的极端温度变化会使空间机构发生周期性的热变形,并诱发结构振动[58-59]。李媛媛[27]研究发现,受日出热环境影响,含间隙铰链处的碰撞频率明显提高,碰撞力幅值大幅增加,其磨损深度比忽略热环境影响的高出2 个数量级。可见,热环境对含间隙空间机构磨损特性的影响不容忽视。
在轨真空环境下,大部分液体润滑剂会立即挥发,因此,航天器中大多采用固体润滑。Li Y 等[60]研究了固体润滑状态下含间隙可展开太阳电池阵的动力学响应和磨损特性,结果(见图13[60])显示,MoS2等固体润滑涂层可以有效抑制间隙引起的系统振动,并大幅提高含间隙运动副的耐磨性能,对延长其使用寿命具有重要意义。

图13 不同润滑涂层下含间隙运动副的磨损深度[60]Fig.13 Wear depth of clearance joint with different lubricant coatings[60]
Gorski 等[61]以空间高精度指向机构为研究对象,通过实验观察了MoS2固体润滑涂层的磨损情况,分析了指向机构的力矩波动与输出精度。空间环境中的超高真空、强辐射等环境因素会严重影响空间润滑材料的可靠性[62]。孙晓军等[63]通过模拟空间环境下的摩擦实验证明,在空间极端条件下,PI、Kapton、PTFE 和 MoS2/PI 等涂层材料的润滑性能会发生明显退化。此外,在大多数航天器工作的低地球轨道中存在大量的原子氧,其氧化性很强,极易与航天器表面发生物理化学反应,导致航天器材料出现腐蚀、变性、剥蚀等一系列问题,进而影响材料的润滑与磨损特性[64]。
3.2 小结与建议
现有航天器含间隙机构的磨损与润滑特性研究不仅很少考虑热环境、空间辐射和原子氧等因素的影响以至于存在很大的局限性,还忽略了运动副磨损过程中接触参数的变化,故而研究结果有较大误差。因此,亟需开展考虑空间综合环境并计入磨损参数变化的含间隙机构的磨损与润滑特性研究。
4 结束语
本文综述了近些年来间隙建模方法、微重力环境下航天器含间隙机构的动力学分析及地面模拟实验,以及含间隙机构的磨损与润滑特性的研究进展。随着对航天器性能要求的不断提高,仍有一些关键问题需研究解决,包括但不限于:
1)运动副接触表面上存在无数大小不同的微凸体,理想情况下接触只发生在微凸体的顶部,而实际的各种接触参数与理想情况存在很大偏差。因此,建立微重力条件下考虑真实粗糙表面的间隙动力学模型对于空间机构的精细分析具有重要意义。
2)针对空间热环境引起的构件变形和振动问题,可以从含间隙运动副的微观接触入手,通过建立考虑热变形的接触力模型,研究热环境对含间隙空间机构的动力学特性以及磨损特性的影响,并进一步开展地面模拟热环境实验研究加以验证。
3)原子氧和空间辐射会侵蚀间隙运动副表面,使其表面物理和化学性质发生变化,进而影响其磨损及润滑特性。因此,在含间隙机构的地面模拟实验中,除计入微重力影响外,还应考虑空间原子氧和辐射环境的影响,进一步完善航天器含间隙运动机构的动力学研究。
4)航天器长时间在轨运行的过程中,运动副的表面形貌、接触面积、接触刚度等随磨损不断变化,给航天器的服役性能预测带来较大困难。因此,进一步开展考虑磨损参数变化的航天器磨损特性研究,对提高航天器的运行稳定性,延长其使用寿命具有重要意义。
