深松参数对双翼深松铲耕作阻力影响的仿真分析
2023-07-04孙坤鹏李吉成
孙坤鹏 李吉成

摘要 利用离散元建立了双翼深松铲的深松仿真模型,分析了深松参数对双翼深松铲耕作阻力的影响。结果表明,双翼深松铲对土壤的作用主要表现在前进过程中对土壤的切削和抬升2个方面;双翼深松铲主要阻力来源于土壤对其前进的阻碍作用,竖直方向上土壤对深松铲抬升作用的阻碍作用也是深松阻力的重要来源之一,双翼深松铲侧方向上的受力非常小;在深松速度0.4~1.2 m/s与深松深度220~300 mm时,深松速度和深松深度对双翼深松铲前进方向的受力均有较大的影响,随着深松深度和速度的不断增加,前进方向的阻力不断增大;深松深度对双翼深松铲竖直方向的受力有较大影响,竖直方向的受力随着深松深度的增加而变大,而深松速度对双翼深松铲竖直方向的受力基本没有影响。
关键词 双翼深松铲;离散元;深松阻力
中图分类号 S222.19 文献标识码 A
文章编号 0517-6611(2023)06-0204-04
doi:10.3969/j.issn.0517-6611.2023.06.048
The Effect of Subsoiling Parameters on Resistance of Wing Subsoiling Shovel by EDEM
SUN Kun-peng, LI Ji-cheng
(School of Intelligent Science and Engineering,Yunnan Technology and Business University,Kunming,Yunnan 650201)
Abstract The subsoiling simulation model of wing subsoiling shovel was established by using EDEM, and the influence of subsoiling parameters on the resistance of wing subsoiling shovel was analyzed.The analysis results were as follows: the effect of wing subsoiling shovel on soil was mainly manifested in two aspects: cutting and lifting of soil in the process of advance.The main resistance of the double subsoiling shovel came from the soil's obstruction to its advance, and the soil's obstruction to the lifting of the subsoiling shovel in the vertical direction was also one of the important sources of the subsoiling resistance.The force on the side of the double wing subsoiling shovel was very small.In the range of 0.4-1.2 m/s and 220-300 mm, the subsoiling speed and subsoiling depth had a great influence on the force in the forward direction of the wing subsoiling shovel.With the continuous increase of subsoiling depth and speed, the resistance in the forward direction increased.The subsoiling depth had a great influence on the vertical force of the wing subsoiling shovel.The vertical force increased with the increase of the subsoiling depth, while the subsoiling speed had no influence on the vertical force of the double wing subsoiling shovel.
Key words Wing subsoiling shovel;Discrete element;Subsoiling resistance
耕作是利用農业机具与土壤之间的相互作用改善土壤耕作层颗粒形状、矿物质、有机质和孔隙率等基本特性的农业生产措施,长期进行翻耕和旋耕作业容易造成农田风蚀和水蚀的问题,也容易在耕作层底部形成坚硬的犁底层,对农作物根系的生长极为不利[1-3],深松作为一种能破坏犁底层的保护性耕作技术被广泛应用。
深松机是进行深松作业的主要工具,其核心部件是深松铲尖和铲柄,国内外学者围绕着这2个核心部件与土壤之间的相互作用开展大量研究,双翼深松铲有更好的土壤扰动效果,而关于双翼深松铲阻力的研究较少。笔者采用离散元的方法,将土壤视为离散的具有黏弹性的有限个颗粒,考虑耕作层、犁底层和心土层不同的物理特性,对双翼深松铲的深松过程进行了仿真,探究深松速度和深松深度对双翼深松铲阻力的影响。
1 材料与方法
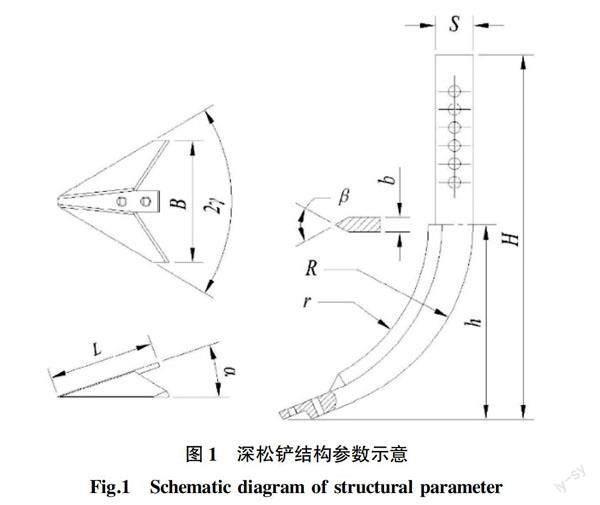
1.1 双翼深松铲模型 该研究的分析模型为JB/T 9788—2020《深松铲和深松铲柄》标准中规定的中型深松铲柄和双翼深松铲尖组合构成的双翼深松铲(图1)。其中,铲柄高度H=600 mm,铲柄工作刃高度h=320 mm,铲柄上部横截面长度S=60 mm,铲柄上部横截面宽度b=25 mm,铲柄刃圆弧r=284 mm,铲柄外圆弧半径R=320 mm,铲柄刃角β=60°;铲柄高度H=600 mm,铲宽度B=200 mm,铲长度L=165 mm,铲翼张角2γ=60°,铲起土角α=19°30′。根据图1的双翼深松铲结构,利用SolidWorks建立双翼深松铲的三维参数化模型并保存成*.IGS格式。
1.2 仿真模型
1.2.1 土壤颗粒模型。
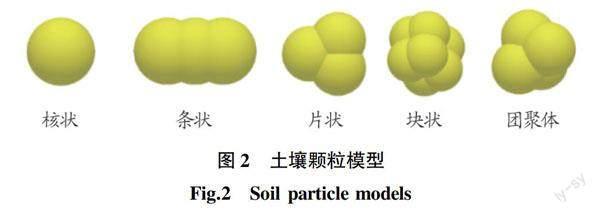
土壤颗粒一般包含核状、条状、片状和团聚体等结构形式[4](图2)。经过长期的耕作,农田形成了分层结构,从上到下分别为耕作层、犁底层和心土层。其中,耕作层和心土层土壤采用核状、条状、片状和块状颗粒来模拟,犁底层土壤采用团聚体来模拟。
1.2.2 土壤颗粒接触模型。
Hertz-Mindling with JKR在Hertz-Mindling(no slip)模型的基础上考虑了颗粒间的凝聚力,该模型适用于模拟颗粒间因静电、水分等原因发生明显黏结的物料,因此选择Hertz-Mindling with JKR作为耕作层和心土层的土壤颗粒接触模型[5]。其中,耕作层土壤颗粒的表面能为5.6 J/m2,心土层土壤颗粒的表面能为6.2 J/m2。相比耕作层和心土层而言,犁底层要坚硬很多,犁底层颗粒间具有较强的液桥黏结力,因此选用Hertz-Mindling with Bond模型来模拟犁底层土壤颗粒之间的接触,模型具体的参数[6]:法向刚度系数 2.4E+06 N/m3,切向刚度系数1.8E+06 N/m3,法向临界应力235 000 Pa,切向临界应力186 000 Pa,开始时间 1.35 s,黏结半径7 mm。
1.2.3 EDEM分析模型。
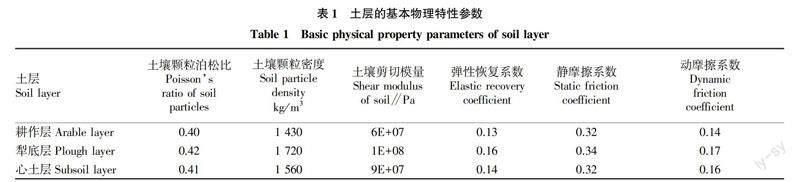
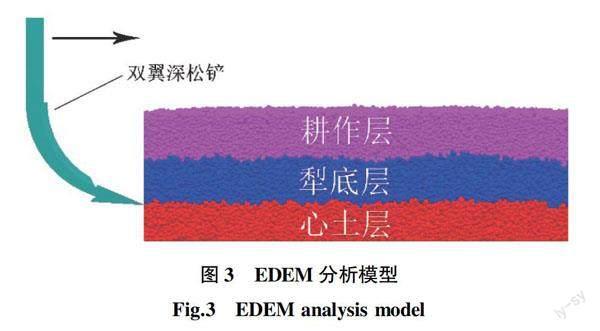
为了满足深松作业仿真分析要求,根据深松深度和双翼深松铲的宽度,在EDEM分析模型中建立了尺寸(长×宽×高)为1 400 mm×1 000 mm×500 mm的土槽。根据实际情况,在土槽中自下向上分别建立了140 mm厚的心土层、140 mm厚的犁底层和150 mm厚的耕作层,各土层的基本物理特性参数见表1[7-8]。
深松铲的材料选用65Mn,材料的密度为7 820 kg/m3,弹性模量为2.11E-11 N/m2,泊松比为0.35[9]。深松铲与耕作层、犁底层和心土层之间的弹性恢复系数均为0.6,静摩擦系数分别为0.31、0.64和0.43,滚动摩擦系数分别为0.11、0.13 和0.07[10-11]。深松铲耕作深度设置为300 mm,建立完成的EDEM分析模型见图3。
在总仿真的0~1.4 s时间段内生成分析模型并使模型颗粒达到稳定状态,在1.35 s时生成犁底层Hertz-Mindling with Bond模型的Bond键;在总仿真时间1.4 s时设置双翼深松铲开始进行深松作业,在总仿真时间第1.4 s记为深松作业的第0 s。深松速度分别设置为0.4、0.6、0.8、1.0和1.2 m/s,不同深松速度工况下,深松深度分別设置为200、220、240、260、280、300 mm,共进行25次仿真试验分析。
2 结果与分析
2.1 双翼深松铲对土壤颗粒作用
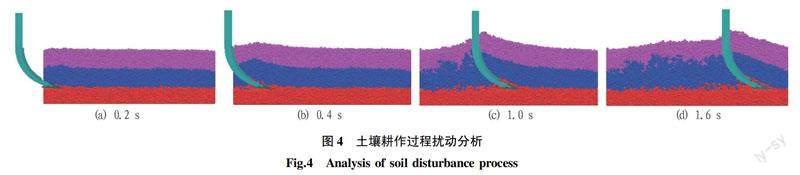
深松过程是深松铲与土壤颗粒相互作用的过程,深松铲的受力主要来源于土壤对其作用力,选取深松深度为300 mm、深松速度为0.8 m/s的试验来分析双翼深松铲在深松过程中土壤颗粒的状态,进而阐述双翼深松铲与土壤颗粒的相互作用情况。
在EDEM模型中提取深松作业过程中第0.2、0.4、1.0和1.6 s时刻的土壤纵向剖视图(图4)。当双翼深松铲尖完全进入土壤中(0.2 s),犁底层的土壤颗粒被双翼深松铲尖抬升了一定高度,但由于耕作层土壤较软,其表面没有发生变形。当铲柄切削刃完全进入土壤中(0.4 s),犁底层和耕作层位于双翼深松铲尖上方的土壤颗粒均被双翼深松铲尖抬升了一定高度,由于双翼深松铲尖的宽度远大于铲柄的宽度,失去双翼深松铲尖的支撑之后,先前被抬起的部分土壤回落;心土层上表面土壤受到双翼深松铲尖剪切、挤压作用与犁底层底部土壤发生了一定混合。当双翼深松铲进入稳定深松状态(1.0~1.6 s),在双翼深松铲的剪切和挤压作用下,犁底层和耕作层的土壤不断被抬升,再加之土壤颗粒的相互作用,土壤不断被破碎;随着双翼深松铲不断前进,各层土壤被挤压抬起和剪切后,由于失去了深松铲的支撑作用重新落下,耕作层底部和犁底层上部的土壤颗粒发生了一定的混合,犁底层底部和心土层上部的土壤颗粒发生了一定的混合,混合现象主要出现在深松铲柄的后侧。总体来看,双翼深松铲对土壤的作用主要表现在前进过程中对土壤的切削和抬升2个方面,因此土壤对双翼深松铲的作用力主要在前进方向和竖直方向上。
2.2 双翼深松铲在不同方向上的受力分析
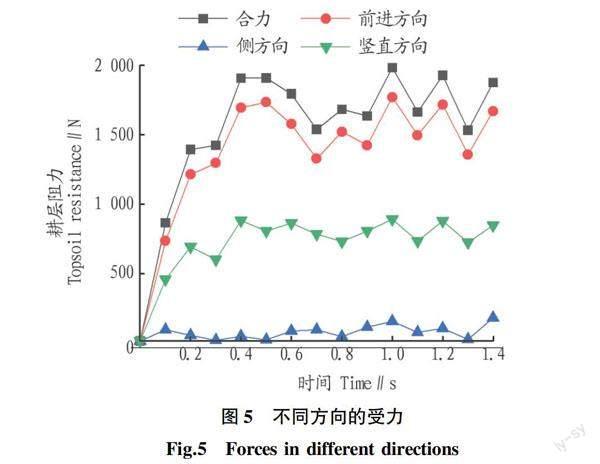
在不同方向上,土壤对双翼深松铲的作用力不同,选取深松深度为300 mm、深松速度为0.8 m/s工况下深松过程为分析对象,分别提取双翼深松铲在前进方向受力、竖直方向受力、侧方向受力以及三者合力的大小(图5)。
从图5可以看出,深松过程中双翼深松铲在不同方向上的受力有较大差异。其中,双翼深松铲主要阻力来源于土壤对其前进的阻碍作用,竖直方向上土壤对深松铲抬升作用的阻碍作用也是深松阻力的重要来源之一,双翼深松铲侧方向上的受力非常小。在稳定工况下,前进方向受力、竖直方向受力、侧方向受力及三者合力的大小分别为1 657.4、866.2、67.9、1 872.8 N。
2.3 耕作深度对深松阻力的影响
深松过程中,双翼深松铲受到的作用力主要为前进方向的阻力和竖直方向的阻力,选取深松速度为0.8 m/s,深松深度分别为220、240、260、280和300 mm的试验来分析深松深度对深松前进方向阻力和竖直方向阻力的影响(图6)。
从图6可以看出,深松深度对竖直方向阻力大小的影响大于前进方向阻力大小的影响。颗粒之间有一定的相互黏结和弹性作用,因此深松过程中双翼深松的受力大小是上下浮动的,总体来看,随着深松深度的不断增加,前进方向的阻力不断增大;双翼深松铲需要抬升的土壤量增加,竖直方向的阻力不断增大。深松深度为220、240、260、280和300 mm时,稳定工况下前进方向阻力大小分别为1 358.7、1 544.1、1 657.2、1 694.1和1 717.3 N,竖直方向阻力大小分别为202.5、331.4、570.1、778.2和866.2 N。
2.4 深松速度对深松阻力的影响
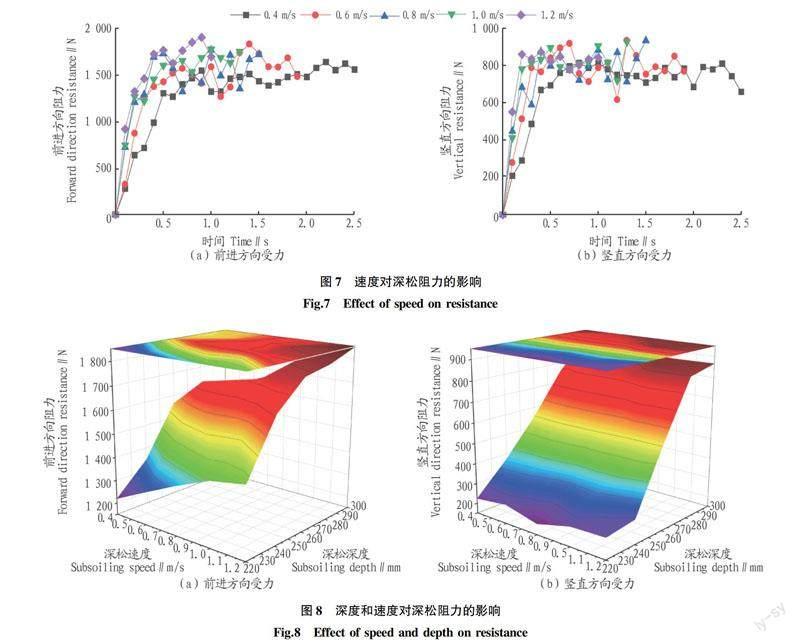
深松速度是影响深松阻力的重要因素之一,选取深松深度为300 mm,深松速度分别为0.4、0.6、0.8、1.0和1.2 m/s的试验来分析深松深度对深松前进方向阻力和竖直方向阻力的影响(图7)。
从图7可以看出,随着深松速度的不断增加,前进方向阻力的大小不断增加,而竖直方向的阻力基本保持不变;深松速度为0.4、0.6、0.8、1.0和1.2 m/s时,稳定工况下前进方向阻力大小分别为1 548.7、1 561.6、1 687.4、1 731.1和1 846.1 N;竖直方向的阻力大小依次为790.3、810.5、866.2、863.6和866.9 N。
2.5 耕作速度和深度对深松阻力的影响
为了进一步研究深松速度和深度对深松阻力的影响,分别提取深松速度和深度分别为0.4、0.6、0.8、1.0、1.2 m/s和220、240、260、280、300 mm 试验下双翼深松铲在前进方向和竖直方向的受力。
从图8可以看出,在深松速度0.4~1.2 m/s与深松深度220~300 mm时,深松速度和深松深度对双翼深松铲前进方向的受力均有较大的影响,深松深度的影响程度大于深松速度的影响程度;在上述范围内,深松深度对双翼深松铲竖直方向的受力有较大影响,而深松速度对双翼深松铲竖直方向的受力基本没有影响。
3 结论
(1)双翼深松铲对土壤的作用主要表现在前进过程中对土壤的切削和抬升2个方面,土壤对双翼深松铲的作用力主要在前进方向和竖直方向上。
(2)双翼深松铲主要阻力来源于土壤对其前进的阻碍作用,竖直方向上土壤对深松铲抬升作用的阻碍作用也是深松阻力的重要来源之一,双翼深松铲侧方向上的受力非常小。
(3)在深松速度0.4~1.2 m/s与深松深度220~300 mm,深松速度和深松深度对双翼深松铲前进方向的受力均有较大的影响,随着深松深度和速度的不断增加,前进方向的阻力不断增大;深松深度对双翼深松铲竖直方向的受力有较大影响,竖直方向的受力随着深松深度的增加而变大,而深松速度对双翼深松铲竖直方向的受力基本没有影响。
参考文献
[1] 陈岗,董继翠,李文标,等.翻耕和松耕深度对紫色土中田烟和地烟主要农艺性状和产质量的影响[J].安徽农业科学,2022,50(13):32-37.
[2] 孔羿勋,杨丹彤,王曦成,等.基于DEM-MBD耦合预破土组合深松铲仿真研究[J].安徽农业科学,2021,49(9):192-195.
[3] 李博.基于离散元法的深松铲减阻及耕作效果研究[D].杨凌:西北农林科技大學,2016.
[4] 顿国强,陈海涛,李兴东,等.基于EDEM的轻型凿式深松铲土壤耕作载荷仿真分析[J].农机化研究,2018,40(3):8-12.
[5] 杭程光.基于离散元方法的深松土壤扰动行为研究[D].杨凌:西北农林科技大学,2017.
[6] 郑侃,何进,李洪文,等.基于离散元深松土壤模型的折线破土刃深松铲研究[J].农业机械学报,2016,47(9):62-72.
[7] 袁军.基于DEM-MBD耦合的自激振动深松机作业过程仿真分析与试验研究[D].长春:吉林大学,2022.
[8] 张喜瑞,曾望强,刘俊孝,等.基于离散元法的砖红壤斜柄折翼式深松铲设计与试验[J].农业机械学报,2022,53(3):40-49.
[9] 张智泓,甘帅汇,左国标,等.以砂鱼蜥头部为原型的仿生深松铲尖设计与离散元仿真[J].农业机械学报,2021,52(9):33-42.
[10] 蒋啸虎.基于土壤动力学的减阻深松铲及耕深检测装置设计与研究[D].长春:吉林大学,2021.
[11] 王学振.土壤-带翼深松铲互作关系及其效应研究[D].杨凌:西北农林科技大学,2021.
基金项目 云南省重大科技计划专项(2018ZC001-303);云南省教育厅科学研究基金项目(2022J1241)。
作者简介 孙坤鹏(1981—),男,安徽淮北人,讲师,从事机械研究和教学工作。
收稿日期 2022-08-10
