基于微透镜阵列的快照式高光谱成像仪研制
2023-07-03薛庆生白皓轩鲁凤芹杨敬尧李辉
薛庆生,白皓轩,鲁凤芹,杨敬尧,李辉
(中国海洋大学 信息科学与工程学部 物理与光电工程学院, 青岛 266100)
0 引言
随着高光谱成像技术的发展,其应用领域已从航空遥感领域拓展至食品安全、医疗、矿物勘探等多个民用领域[1-3]中。通过对不同种类目标物的光谱成像,可以获得目标物的空间光谱信息三维立方体[4]。配合后续光谱数据处理算法,可实现对图像中如病灶区域、特定矿物、病虫害植株识别的功能,为多个领域提供了一种高效的探测手段。然而目前主流的高光谱成像技术多采用线扫描式光谱成像方案,通过扫描机构携带成像光谱仪扫描目标物,实现对目标物的扫描光谱成像。该类技术方案虽然能够实现对较高空间分辨率及较高光谱分辨率信息的获取,但是其线扫描光谱成像的特点,使其牺牲了时间分辨率,导致该类技术无法实现对动态目标及短时过程的光谱成像探测。同时,由于该类高光谱成像系统对扫描机构的需求,使得系统通常体积较大,且对推扫机构的稳定性要求较为严格,推扫机构的轻微抖动即有可能导致最终获取的光谱图像的失真。由于上述缺陷,目前高光谱成像技术的应用领域受到限制。随着科学技术的发展,快照式高光谱成像技术迅速发展,为解决上述问题提供了可行的技术方案。其中基于微透镜阵列的快照式光谱成像系统,通过微透镜阵列分割物镜像面,并对分割后的像面各部分分别进行色散成像,实现对目标物的快照式光谱成像。该类技术无需复杂算法运算,装调难度小,为进行快照式高光谱成像探测提供了一种的新的可行技术方案[5]。为弥补传统线扫描式光谱成像技术的缺陷,进一步提升光谱成像技术的探测效率,扩大光谱成像技术的应用领域,本文开展基于微透镜阵列的快照式高光谱成像仪研制工作。
1 微透镜阵列快照式高光谱成像系统原理
1.1 系统光谱成像原理
基于微透镜阵列的快照式光谱成像系统主要包括物镜、微透镜阵列、光谱成像系统及探测器四部分[6-11]。物镜用于收集目标探测区域的光信息。微透镜阵列放置于物镜的焦面处,将焦面不同区域再次会聚为像点。光谱成像系统承接微透镜阵列汇聚的像点阵列,并对其进行色散成像。色散成像结果由探测器靶面承接并捕获。系统组成及成像原理如图1。图1(a)为物镜获取的目标物图像,该图像经微透镜阵列再次成像后变为如图1(b)所示的像点阵列,像点阵列经光谱成像系统色散后如图1(c)。其中,考虑像面照度的均匀性并保证微透镜阵列各子透镜光线汇聚情况的一致性,物镜需具备像方远心特征。此时,物镜出瞳位于无穷远处,则微透镜阵列相当于对物镜的出瞳成像,像方光线孔径角即为微透镜视场角。
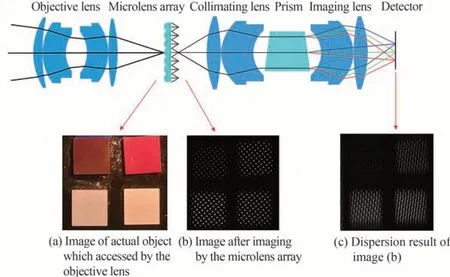
图1 基于微透镜阵列的光谱成像系统组成及原理示意Fig.1 The structure and principle of the snapshot spectral imager based on microlens array
1.2 系统物镜设计
基于微透镜阵列的快照式光谱成像系统中,微透镜阵列作为系统的核心元件,替代了传统推扫式光谱成像系统中的狭缝,微透镜阵列所成的像大小对应于传统推扫式光谱成像系统中的狭缝宽度,在较大程度上影响了系统的光谱分辨率。微透镜阵列位于物镜像面成像时的几何光学原理示意如图2,图中u为物镜像方光线孔径角,fML为微透镜焦距,y′为微透镜所成像的大小,微透镜阵列在对像方远心物镜出瞳成像时,对于微透镜阵列的透镜单元而言物镜系统的孔径角即为微透镜的视场角。根据几何光学可知,在微透镜阵列单元焦距一定的情况下,微透镜的视场越大,微透镜所成像的尺寸越大。即物镜系统的F数越小,微透镜阵列所成的出瞳的像越大,系统的光谱分辨率越低,因此基于微透镜阵列的光谱成像系统中,物镜在具备像方远心特征时,还需具备较大的F数。如图2,微透镜在成像时相当于将一部分物面进行了会聚,必然会导致最终获取图像的空间分辨率损失。若微透镜阵列光谱成像系统在读取数据时将单个微透镜所成的像作为最终获取图像中的单个像素,则其空间分辨率主要取决于微透镜尺寸,经过微透镜阵列后的像的空间分辨率可近似表示为:

图2 微透镜在物镜像面成像时的几何光学原理示意Fig.2 Schematic diagram of geometrical optical principle of microlens imaging on the image plane of objective lens
式中,f为物镜焦距,D为微透镜口径大小,l为物距。
根据传统光学系统信噪比计算式(2)、(3),信噪比主要与信号电子数Se、暗电流电子数ndark及读出噪声有关,其中在正常光照环境探测情况下读出噪声及暗电流电子数与信号电子数相比较小,信噪比主要取决于信号电子数大小。在到达系统入瞳处辐亮度Lλ、量子效率η,光学系统透过率to,积分时间tint等条件一定的情况下,信噪比(Signal to Noise Ratio, SNR)主要与系统的F数、探测器单个像元面积Ad相关[12]。对于微透镜阵列高光谱成像系统而言,微透镜阵列的引入相当于对物镜像面进行了合并。根据图2 中几何光学原理,随着物镜F数的增大,微透镜阵列所成光斑越小,即虽然物镜整体从外界探测得到的光能量减小,但能量更加集中在一片区域上。在光谱成像系统垂轴放大倍率为-1×的情况下,在物镜后方加入微透镜阵列后,探测器上单个像元面积Ad实际对应大小为Ao的未加入微透镜阵列时的物镜像面面积,则加入微透镜阵列后单个像元探测信号电子数计算方法可由式(2)变为式(6)。由式(4)~(6)可推得式(7),其中FM为微透镜阵列中透镜子单元的F数,FO为物镜的F数。则由式(7)可知微透镜阵列光谱成像系统探测的信号信噪比主要和微透镜的F数有关。
在进行光学系统设计前,首先选取微透镜阵列及探测器,并根据其参数进行了后续光学系统设计工作。为获取较高的光谱分辨率,选取的微透镜应具备较小的焦距以获取较小的出瞳像。为获取较高的单色图像空间分辨率,选取的微透镜阵列需具备较小的单元间距。最终选取的微透镜阵列微透镜中心间距为100 μm,微透镜焦距为0.5 mm,微透镜单元个数为100×100。选取探测器像元个数为2 048×2 048,探测器靶面大小11.264 mm×11.264 mm。
考虑到应用范围、微透镜阵列间距、探测器量子效率及色散后所成的像的排布等问题,系统探测波段确定为500~700 nm。为探测更大目标区域,物镜焦距大小确定为25 mm,物镜成像距离为1 m。探测器、微透镜阵列及物镜参数如表1。根据微透镜阵列对角线尺寸及物镜焦距,根据几何光学可计算得到物镜的半视场角为18°。考虑系统的信噪比及光谱分辨率需求,单个微透镜所成的像拟在15 μm 左右,根据微透镜阵列焦距可计算得到物镜F数为34。根据计算结果,为确保系统光谱分辨率,并综合考虑像差及加工误差等因素,物镜的F数确定为60。物镜具备像方远心特征。为保证后续色散成像效果,物镜畸变小于1%。
表1 探测器、微透镜阵列及物镜参数Table 1 Parameters and values of the detector, microlens array and the objective lens
为方便后续系统整体的装配,为微透镜阵列安装留出空间,物镜需具备较大的后截距。根据物镜技术参数需求,物镜整体采用反远距型光组结构,物镜前组为负光焦度,后组为正光焦度。使用ZEMAX 光学设计软件对物镜结构进行建模、设计、优化。通过分裂透镜复杂结构、弯曲透镜分配光焦度等方法对物镜系统进行整体的优化设计。最终的优化设计结果如图3~图6。图3 中从左第一面起,光学设计参数如表2。玻璃选用成都光明玻璃,便于采购加工。

表2 物镜设计结果具体参数Table 2 Design result of the objective lens

图3 物镜二维结构示意Fig.3 2D structure of the objective lens

图4 物镜点列图Fig.4 The spot diagram of the objective lens
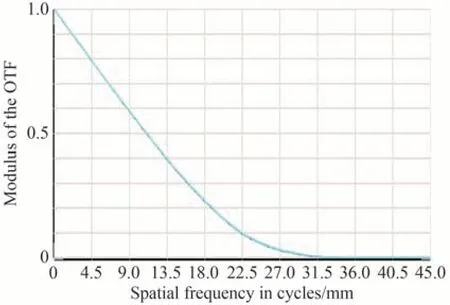
图5 物镜MTF 曲线Fig.5 The MTF curve of the objective lens
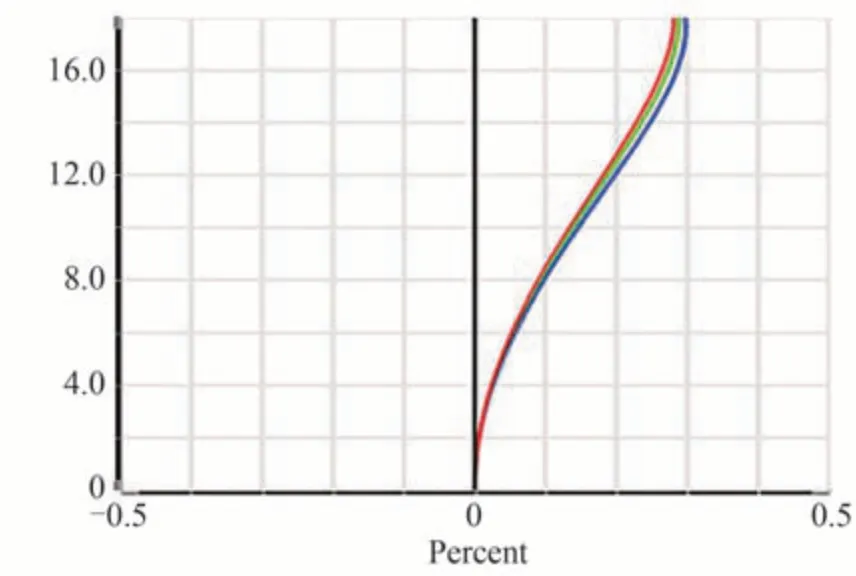
图6 物镜畸变示意Fig.6 The distortion of the objective lens
根据物镜设计结果,在物镜后方加入微透镜阵列,加入微透镜阵列后的整体结构如图7。通过ZEMAX软件自带的图像模拟仿真功能对微透镜阵列后方的成像情况进行了仿真,仿真结果如图8。

图7 物镜连接微透镜阵列后结构及成像情况示意Fig.7 The structure and imaging statue of the objective lens and microlens

图8 微透镜阵列前后图像示意Fig.8 The image before and after the microlens array
1.3 光谱成像系统设计
微透镜阵列F数为5,为承接微透镜阵列汇聚光束,光谱成像系统的F数确定为5。根据微透镜阵列整体尺寸,光谱成像系统视场X、Y方向物高均确定为5.5 mm,波段范围为500~700 nm。由于微透镜阵列排布较为紧密,留给微透镜阵列各单元的色散空间较小。考虑到光学设计难度,光谱成像系统准直镜组及成像镜组焦距确定为50 mm 左右,则系统所需色散元件的色散本领适中。考虑到小线对光栅采购较为困难及光栅衍射导致系统能量的损耗,选用棱镜作为系统的色散元件较为合适。双阿米西棱镜具备直视型色散能力,即某一波段范围内的光线经棱镜色散后其传播方向改变较小,能够保证系统整体结构紧凑。根据几何光学理论计算得到的双阿米西棱镜参数及材料如图9(a)。其中双阿米西棱镜左右对称,光谱成像系统准直镜组及成像镜组采用对称结构设计,有效消除垂轴像差的同时,使系统整体的加工装调更为简便。光谱仪整体结构设计结果如图9(b)。探测器2×2 像元合并使用前提下,系统MTF 曲线显示截止频率为45 lp/mm,光谱成像系统各波段MTF 曲线及像面光迹图分别如图10、图11。准直镜组及成像镜组的详细设计参数如表3。
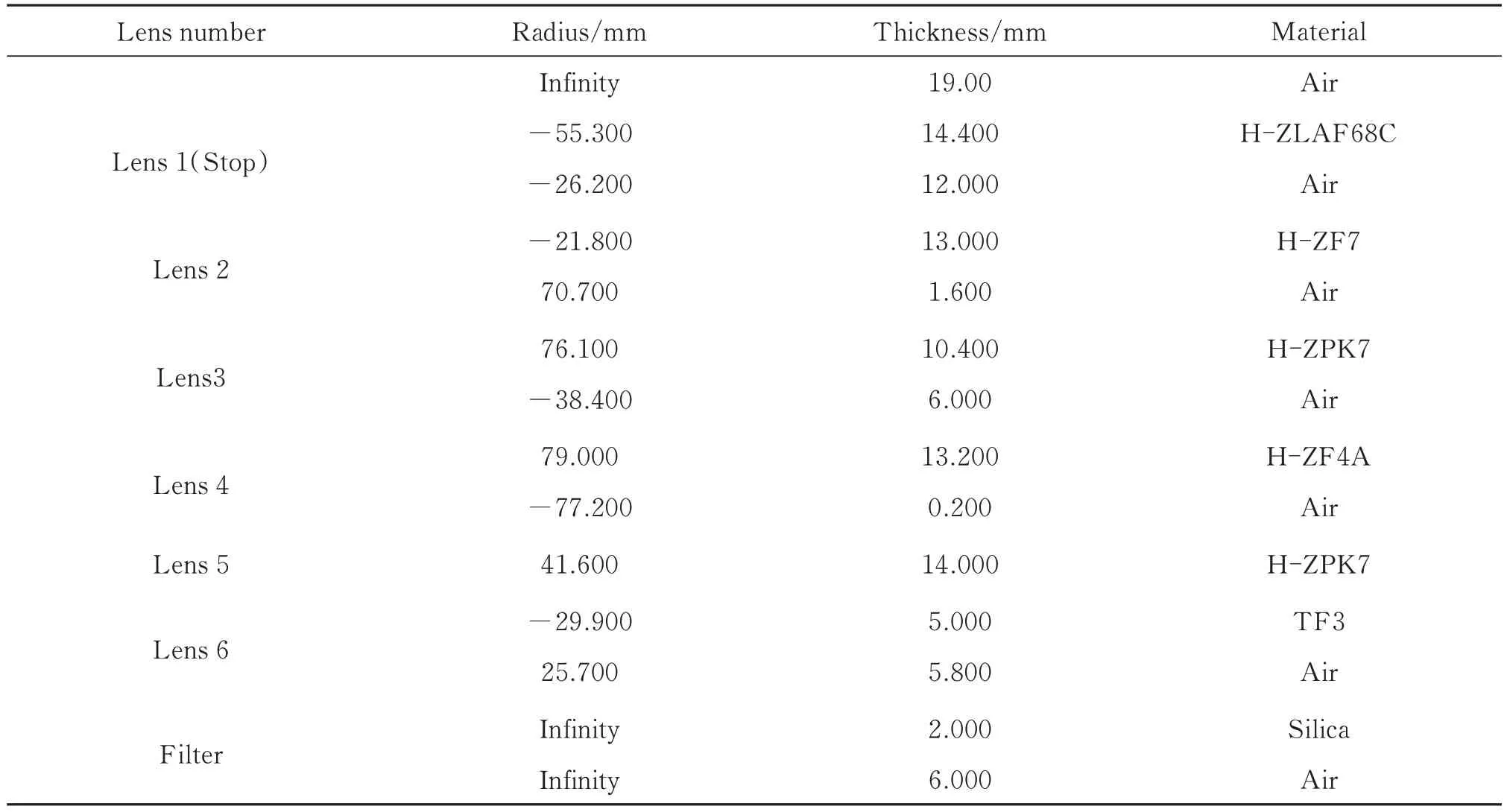
表3 光谱成像系统准直镜组及成像镜组设计结果Table 3 Design result of the collimating lens and imaging lens

图9 双阿米西棱镜及光谱成像系统二维结构示意Fig.9 The 2D structure of the double amici prism and imaging spectrometer
图10 光谱成像系统各波段MTF 曲线Fig.10 The MTF curve of the imaging spectrometer at different wavelengths

图11 光谱成像系统光迹Fig.11 The footprint of the imaging spectrometer
将物镜及光谱成像系统连接后,若不旋转微透镜阵列,则由于微透镜阵列间距较小,不同微透镜所成像点经色散后的像会混叠在一起,混叠情况如图12(b),该混叠导致无法从获取的图像中提取目标物真实的光谱图像信息。因此在设计阶段旋转微透镜阵列,通过ZEMAX 软件的几何位图分析功能,对系统成像情况进行仿真,以保证系统在当前设计情形下不会出现光谱信息的混叠。仿真结果如图13。微透镜阵列所成的出瞳的像经光谱成像系统成像后按照波长分立开,不同微透镜像点色散成像结果未发生混叠。

图12 不同微透镜所产生的光谱混叠示意Fig.12 The overlap of the spectrum generated by different microlens
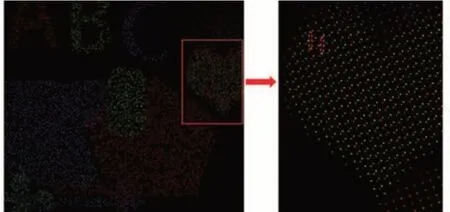
图13 系统仿真图像Fig.13 Simulation result of the whole system
2 快照式高光谱成像系统搭建及定标研究
2.1 快照式光谱成像系统搭建
为进一步研究基于微透镜阵列的快照式光谱成像系统的成像效果,根据上述设计结果开展快照式光谱成像系统搭建工作。根据上述系统设计结果,光谱仪成像镜组及准直镜组焦距约为53.2 mm,选取两个同一型号的焦距为55 mm(Computar Tec-55)的远心镜头,调整两个远心镜头对无穷远处成像作为光谱成像系统的准直及成像镜组。棱镜根据设计结果进行加工,实际加工元件如图14(a)。根据物镜像方远心及大F数要求,同样选取焦距为55 mm 的远心镜头作为物镜。较设计结果中的25 mm 物镜而言,该物镜虽探测视场角变小,但其空间分辨率更高且像面能覆盖较大部分微透镜阵列。调整物镜F数至60 左右,并在物镜后方放置微透镜阵列,微透镜阵列实物如图14(b)。根据系统探测范围,选取一带通范围为400~700 nm 的带通滤光片配合一500 nm 长波通滤光片进行滤光。搭建的整体光路如图15。
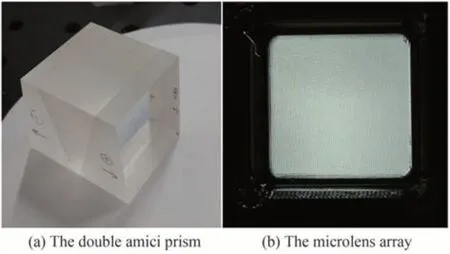
图14 关键元器件实物Fig.14 The key components of the whole system

图15 快照式光谱成像系统光路Fig.15 The structure of the snapshot hyperspectral imager based on microlens array
在搭建系统时,首先移除物镜及棱镜,采用单色光源照射微透镜阵列,调整准直镜组、成像镜组及微透镜阵列位置,使微透镜阵列所成的像很好地汇聚,在探测器上形成汇聚好的像点阵列。之后在微透镜阵列前方放置物镜,使用标准反射率白板作为目标物,使用两个50 W 的卤素灯作为光源照射目标物。首先调整物镜F数至40 左右,微调微透镜阵列位置,使最终得到的微透镜单元汇聚光斑最小。而后在系统中加入棱镜,调整物镜F数至60 左右,旋转微透镜阵列避免色散条带之间的重叠,得到的数据如图16 中绿色条带所示,移除棱镜得到图像如图16 中红色光斑所示。
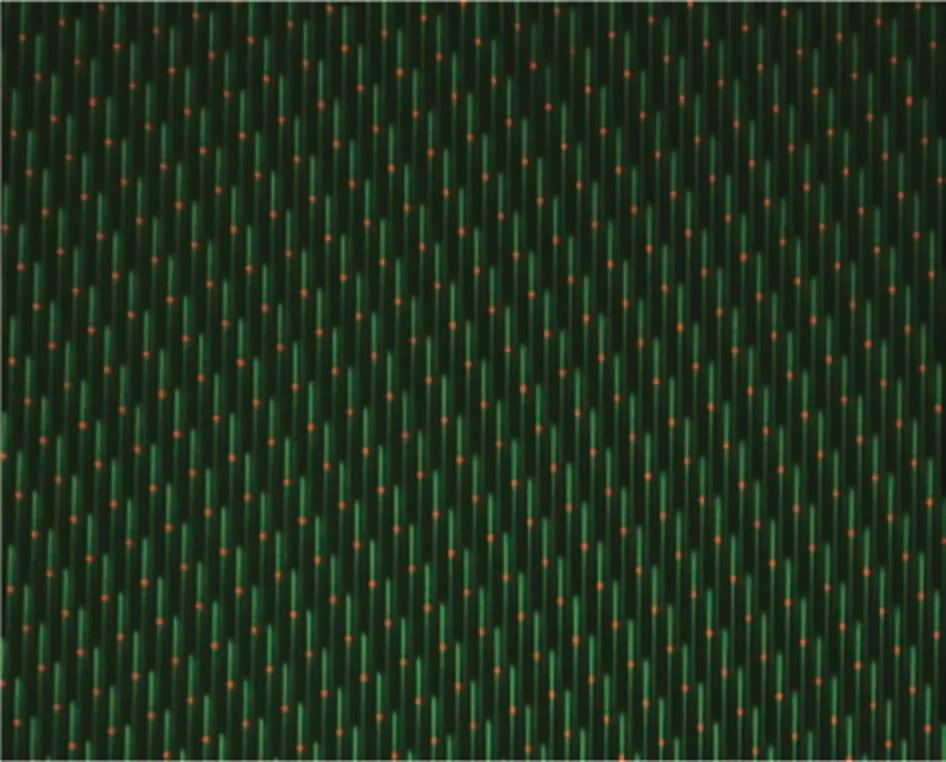
图16 系统获取的数据合成图Fig.16 The image composed of the data obtained by the system
2.2 快照式光谱成像系统数据处理
在搭建系统过程中,拍摄得到的标准反射白板未经色散时的数据可作为确定各微透镜阵列单元成像位置的依据。首先对获取的标准白板未经色散时的图像进行同态滤波,以提升部分边缘视场光斑亮度,从而提升可提取像点位置信息的像点个数。然后对图像进行二值化处理,以提取出各光斑的主体亮点部分,再对二值图像进行高斯模糊,使得所有像点更能呈现出圆形几何特征,便于后续利用霍夫变换检测出光斑圆心位置。为生成便于读取光谱图像的像点中心位置坐标阵列,对经部分预处理后的图像先根据微透镜阵列旋转角度进行反向旋转,再进行圆心坐标提取。此时提取的圆心坐标可根据横纵坐标大小生成便于读取光谱图像信息的坐标点阵列。根据图像旋转变换关系将生成的坐标点阵列转换为未经旋转前图像中的坐标(XC,YC)。提取过程中的部分结果如图17。其中图17(a)为系统中未放置色散元件时部分拍摄得到的白板图像,图17(b)为图17(a)部分经高斯模糊后的结果,确定的便于读取光谱图像的各像点中心位置信息如图17(c),其中红点为确定的光斑中心位置。在系统中放置色散元件,采用单色仪直接照射系统进行系统的光谱定标,对探测器靶面上分布在不同位置处的多个微透镜单元所成的不同波长的像按照色散方向取一列进行高斯拟合,确定不同波长下微透镜单元所成像的位置(Xw,Yw),记录不同波长照射情况下(Xw,Yw)相对(XC,YC)的偏移量作为光谱定标结果。通过对靶面不同位置处微透镜单元所成的像光谱定标结果取平均,作为系统整体的光谱定标结果。根据确定的(XC,YC)及光谱定标结果,即可从单张图片中进行各波段单色图像的提取。

图17 数据预处理及像点位置确定结果Fig.17 The pre-processing result of the data and determined center of microlens
单色仪定标结果如图18(a),对单色仪定标结果进行非线性拟合,以不同波长探测器上光斑通过高斯拟合确定的中心位置作为自变量,光斑对应波长作为因变量进行三次拟合,拟合结果如图18(b)。在单色仪定标结果基础上,进一步使用汞灯作为照明光源对系统进行照射,部分汞灯谱线如图19。对单色仪定标拟合曲线求导即可获得系统在不同波长处的线色散率,根据系统在汞灯特征谱线处线色散率及汞灯在特征峰处的半高宽即可求得系统整体在特征峰处的光谱分辨率。根据计算结果,系统在汞灯546 nm 特征峰处光谱分辨率优于3 nm,具体计算数值如表4。

表4 系统光谱分辨率计算结果Table 4 Spectral resolution calculating result of the system
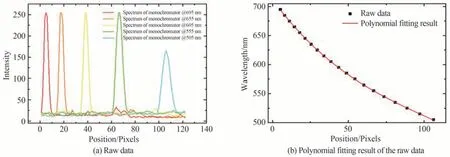
图18 定标数据及结果Fig.18 The calibration data and result
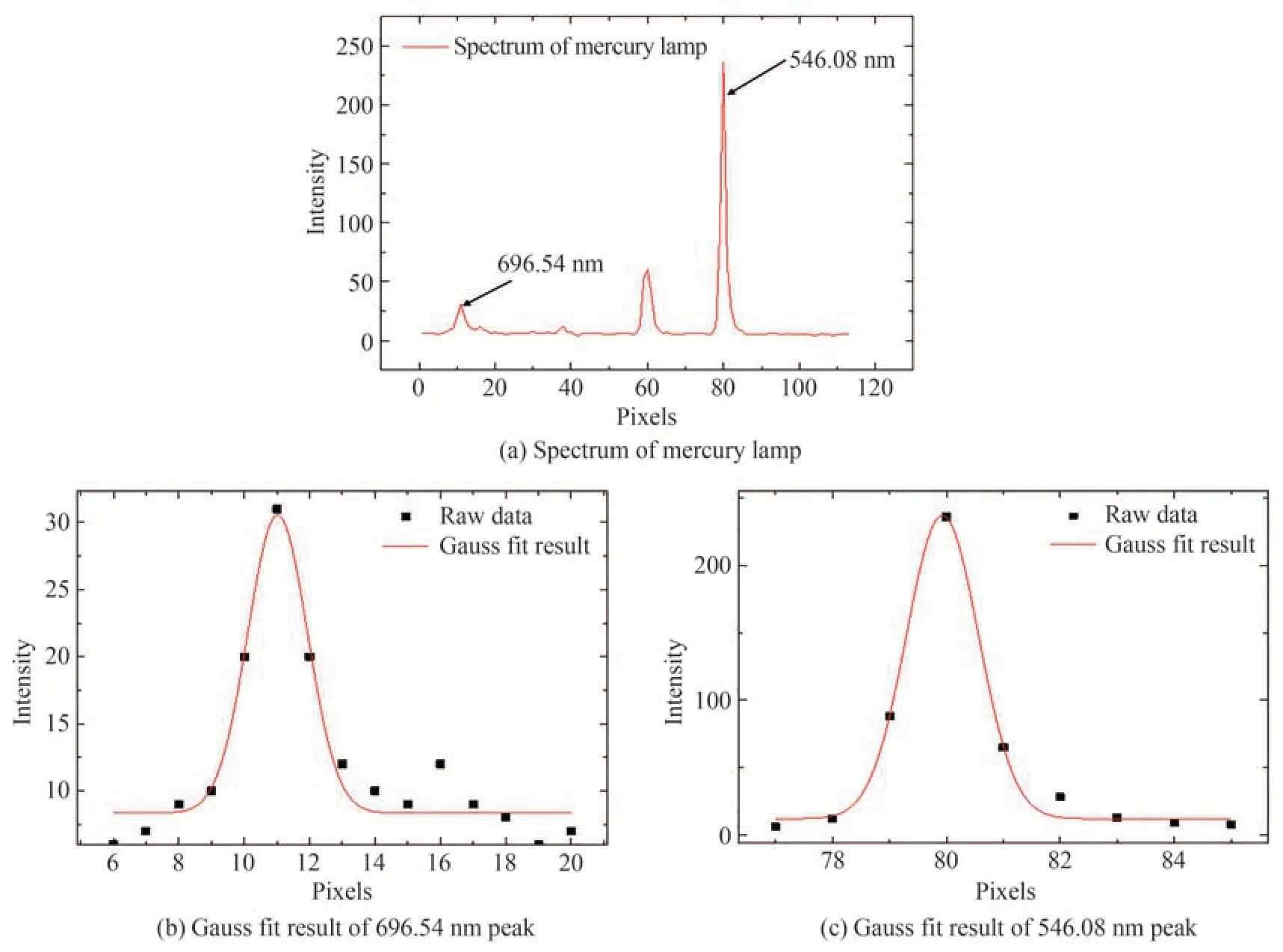
图19 汞灯光谱及其高斯拟合结果Fig.19 Spectrum of mercury lamp and its gauss fit result
在完成对微透镜阵列光谱成像系统的光谱定标及光谱分辨率计算后,对系统整体的空间分辨率进行了测试。光谱成像系统垂轴放大率为−1,系统整体的空间分辨率主要由物镜及微透镜阵列组成的子系统决定,物镜及微透镜阵列所组成的子系统可根据式(1)进行计算。系统采用的物镜焦距为55 mm,物距为1.1 m,微透镜口径大小为100 μm,计算得到的系统理论空间分辨率为2 mm。以图20(a)中不同间隔距离的条带图案为目标物,对系统整体的空间分辨率进行了测试,测试结果如图20(b)。图20(a)中间隔2.2 mm 的条带在图20(b)中仍能辨认,但图20(a)中间隔2.1 mm 的条带图案明暗条带区分度降低。系统实际空间分辨率略低于理论计算值。
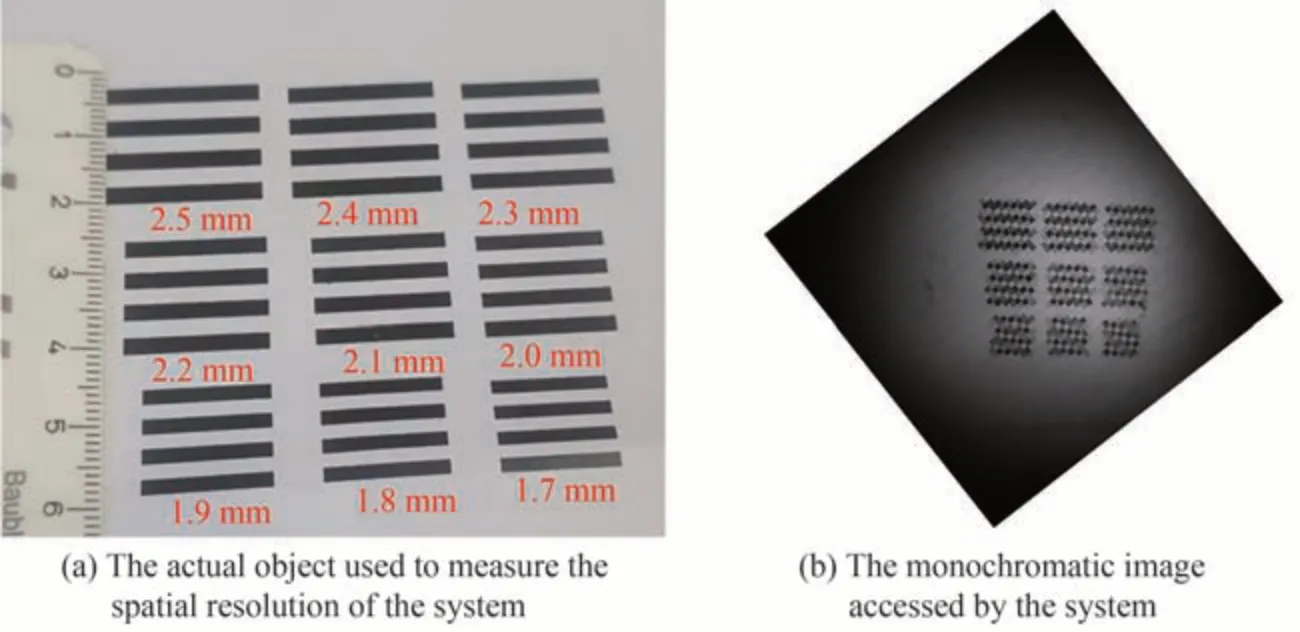
图20 用于检测系统空间分辨率的实物及系统拍摄图像Fig.20 The object used to measure spatial resolution and the image obtained by the system
根据单色仪光谱定标结果及确定的微透镜像点位置,即可对单次拍摄得到的原始数据中的不同波段单色图像进行提取。以图21(a)中的物体作为目标物,对目标物进行了光谱成像,最终获得的原始数据如图21(b),根据光谱定标结果及确定的像点位置从图21(b)中对不同波段空间信息进行提取,提取出的各波段单色图像如图22。由于采用成像物镜倒置作为准直镜组,经准直后的外边缘视场光束经发散无法被成像镜组接收,微透镜阵列外边缘图像无法经成像镜组成像到探测器靶面上。故目前只实现了对67×67 个微透镜阵列单元像点的利用,即最终获取的单色图像像元规模为67×67。根据图18(b)定标拟合结果可知系统在波段范围内色散长度约为100 个像元,按照等像元间隔采样提取光谱信息,每2 个像元提取一个通道光谱图像,则可提取50 个光谱通道的光谱图像。

图21 实物图及拍摄原始数据Fig.21 The true object and the origin data obtained by the system
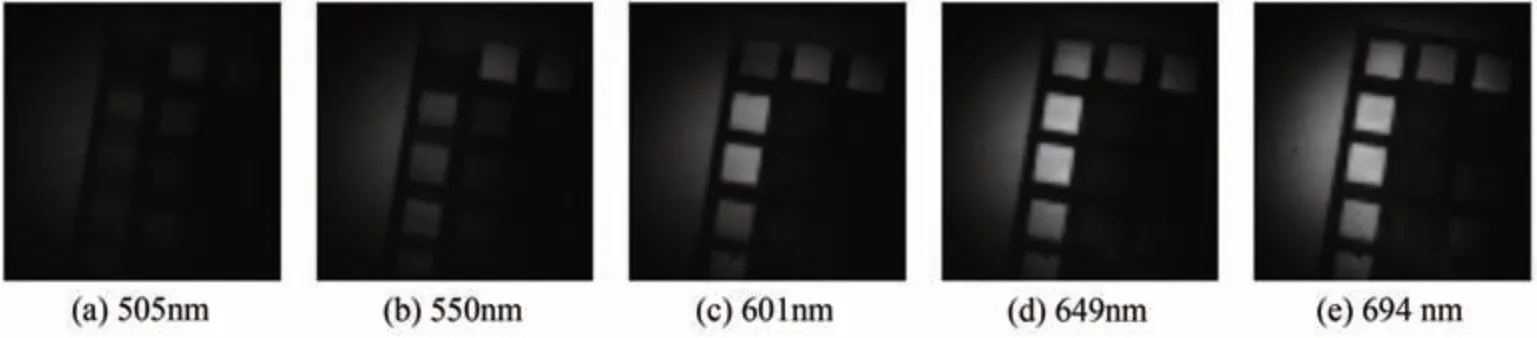
图22 多个通道单色图像Fig.22 Monochromatic images of different spectral channels
从获取的色板单色图像中提取红色、橙色、黄色、浅绿色、绿色等几个区域的光谱曲线,获取的光谱曲线如图23(a)。除使用系统对标准色板进行光谱成像外,还对标准反射率板进行了光谱成像,以获取光源的标准反射光谱,从而对不同色板的反射率进行计算,计算得到的不同色板的反射率曲线如图23(b)。使用商业地物光谱仪对光源及不同色板处光谱进行了测量,并进行了反射率计算,对商业化光谱仪测量反射率进行归化处理,与搭建系统获取的反射率对比如图24,其中虚线为商业化光谱仪获取的反射率信息归化处理结果。搭建系统所测目标物反射率特征峰与商业地物光谱仪所测目标物反射率特征峰一致,证明系统具有良好的光谱探测能力。

图23 搭建系统拍摄图像获取的光谱曲线及反射率曲线Fig.23 The spectrum and reflectance obtained by the system

图24 商业光谱仪与搭建系统测量反射率对比Fig.24 Comparison of the reflectance obtained by the commercial spectrometer and established system
3 结论
本文从微透镜阵列快照式光谱成像系统的成像原理出发,首先对微透镜阵列的成像特性进行分析,在分析结果的基础上对光学系统参数进行计算,对关键元器件进行选型。基于选型结果进行光学系统设计,并通过光学设计结果进行成像仿真。为进一步研究系统的成像特性,在实验室环境下搭建了微透镜阵列快照式光谱成像系统。以光学设计结果中的色散元件作为实际色散元件,采用三个型号一致的远心镜头分别作为物镜、光谱仪准直镜组、成像镜组。对搭建的光谱成像系统进行了定标测试。经测试,系统光谱成像性能良好,能够实现快照式光谱成像,且探测效率高,为拓展成像光谱仪应用范围,简化光谱成像系统提供了一种新的可行方案。但目前该系统图像空间分辨率仍较低,后续拟在系统中添加一分光器件,获取物镜后方高空间分辨率信息,通过图像融合方法,提高系统探测得到的光谱图像的空间分辨率,提升系统整体的探测能力。
