飞行器航迹角系统有限时间跟踪自适应迭代学习控制
2023-06-29张春丽
张春丽, 田 旭, 严 雷
(西安理工大学 陕西省复杂系统控制与智能信息处理重点实验室, 陕西 西安 710048)
随着科学技术的不断发展,飞行器技术也随之发生了很大的变化。飞行器的种类越来越多,性能要求越来越高,使得如今飞行器的控制过程变得越来越复杂[1-2]。飞行器的非线性控制[3-5]是控制领域的一个热点,由于动力学模型存在强耦合和高度非线性的特点,使得控制律设计具有一定的难度(根据不同的目标和测重点)。对于非线性飞行器控制系统,反馈线性化[6-8]是其中一种很常见的方式,并且对于飞行器航迹角系统的研究,一般采用将飞行器航迹角模型抽象为飞行器纵向模型的方式加以研究[9-11]。
自适应控制[12]相较于其他控制方法拥有可以对带有不确定项的系统进行控制的显著优势,受到了越来越多学者们的关注。针对飞行器的非线性动力学模型[13]的不匹配、不确定性,由未知外部干扰和未建模动力学组成的相关的自适应方法被陆续提出。例如,文献[14]针对具有强耦合性、高度非线性等特性的高超声速飞行器控制问题,提出了一种改进的自适应二阶滑模控制方法。文献[15]研究了参数不确定性的表示方法,提出了一种针对高超声速飞行器姿态跟踪的新型鲁棒自适应控制方法。文献[16]研究了时变非对称输出约束下六自由度四旋翼的轨迹跟踪问题,将自适应控制器用于在线估计外部干扰的上限。上述文献虽然都不同程度地处理了飞行器非线性动力学模型的不确定性问题,但是都没有考虑研究对象在有限时间区间内的高精度轨迹跟踪控制问题。
迭代学习控制[17](Iterative Learning Control, ILC)是上世纪末兴起的由人工智能与自动控制相结合的新的学习控制技术,适合处理重复系统或周期系统的各种不确定。对于有限时间控制而言,控制对象可以看作是周期系统,通常情况下将自适应控制方法和迭代学习方法相结合来处理非线性不确定系统控制问题[18-21]。文献[22]针对同时具有状态和输入约束的非线性系统,提出了一种新的自适应迭代学习控制(Adaptive Iterative Learning Control,AILC)方案,同时考虑了时变参数不确定性、外部干扰和随机初始误差。文献[23]考虑了参数系统的不确定性,研究了具有部分结构信息的连续时间参数非线性系统在迭代变试验长度环境下的自适应迭代学习控制问题。文献[24] 针对具有不确定非线性死区输入和控制方向的系统,提出了一种具有Nussbaum函数的离散时间自适应迭代学习控制。作为一种智能控制策略,自适应迭代学习控制能够很好地处理非线性系统中的不确定问题。
基于上述讨论,本文将自适应迭代学习方法应用于飞行器航迹角的有限时间跟踪控制问题,来处理飞行器纵向模型中的参数不确定及外界未知扰动,通过设计自适应迭代更新律估计系统的不确定性,从而使整个闭环系统收敛,实现了飞行器航迹角在有限时间区间内的高精度轨迹跟踪,最后通过仿真试验证明了所提控制方法的有效性。
1 系统描述
本文将通过输入理想的飞行器舵面偏角来控制飞行器航迹倾角。仅考虑飞行器在俯仰平面上的运动,飞行器纵向模型如图1所示。

图1 飞行器纵向模型示意图Fig.1 Schematic diagram of longitudinal model of aircraft
根据文献[25],飞行器的简化模型为:
(1)
式中:γ为飞行器航迹倾角;α为飞行器攻角;θp为飞行器俯仰角;q为俯仰角变化率;VT为飞行速度;m为飞行器质量;g为重力加速度;Lα为升力曲线斜率;L0为其他升力的影响因素;Mδ为控制俯仰力矩;M0为其他来源力矩,用M0=Mαα+Mqq来近似代替,Mα和Mq分别为飞行器攻角和俯仰角变化率的控制力矩参数;δ为舵面偏角。在任意时刻,Lα、L0、Mδ、Mα和Mq都可视为未知常数。
定义状态变量x1,k=γ、x2,k=α、x3,k=q,控制输入为uk=δ,yk=x1,k为系统的输出。k为迭代次数,考虑模型的不确定性,得到严格反馈形式下的三角形模型:
(2)
对模型做如下假设。
假设1 航速VT通过某线性控制器会稳定在理想值的一个很小邻域内,被视作一个常量。
假设2 所有状态变量均可以被解出且可以用于反馈。
假设3 已知未知参数有界,即对i=1,3,存在已知正数aim、aiM使得aim≤ai≤aiM。

假设5 存在正实数L,使得|L0|≤L,在某一时刻,M0可被视为已知常数。
本文的控制目标:针对飞行器纵向模型的转化模型式(2),设计自适应迭代学习控制律uk,使得系统的输出yk能在有限时间[0,T]上跟踪理想轨迹x1d。
2 控制器设计
在控制器的设计过程中,将用到以下收敛级数序列的定义和定理。
定义1[26]收敛级数序列{Δk}定义为:
(3)
其中k=1,2,…;a和l是需要设计的常参数,满足a>0∈R,l≥2∈N。

(4)
结合所得的严格反馈形式下的三角形模型,将复杂的非线性系统拆分成三个子系统,对两个虚拟控制量进行反演设计,设计出满足该系统控制目的的实际控制律和参数更新律。
定义三个实际轨迹和理想轨迹之间的误差:
e1,k=yk-yr=x1,k-x1d
(5)
e2,k=x2,k-α1,k
(6)
e3,k=x3,k-α2,k
(7)
对其进行求导并结合式(2)得到:
(8)
(9)
(10)
设计虚拟控制律α1,k、α2,k及实际控制律uk,分别为:

(11)
(12)


(13)

设计参数更新律:
(14)
(15)
(16)
(17)
(18)
(19)
其中Γi(i=1,2,3,4,5,6)为可设计的正数。

3 稳定性分析
针对控制器设计部分,本文以定理的形式得出以下结论并进行严格证明。

证明:选择如下李雅普诺夫函数:
(20)
(21)
(22)

对式(20)求导,得:
(23)
将式(11)、式(14)和式(15)代入式(23),得:
(24)
同理,对式(21)和式(22)求导,得:
(25)
(26)
将式(12)、式(16)和式(17)代入式(25),得:
(27)
将式(13)、式(18)和式(19)代入式(26),得:
(28)
其中对任意r>0,有:
根据假设6,有ei,k(0)2=0≤ei,k(T)2,通过式(26),得:
(29)
将式(28)代入式(29),得:
(30)
令V0=

(31)
根据引理1可得:
(32)
V0(k)有界且
因此
(33)
(34)

4 仿真分析

根据所设置的参数得到初始误差均为零,且ρ1=0.01、ρ2=0.1、ρ3=0.05。
在满足李雅普诺夫稳定性的条件下,选择控制参数:S1,k(0)=0.1、S2,k(0)=-0.1、S3,k(0)=-0.1、A1,k(0)=1.209、c1=1、α1,k(0)=0.901、A3,k(0)=1.4、c2=19、c3=44、Γ1=9.9、Γ2=0.01、Γ3=0.01、Γ4=0.001、Γ5=0.1、Γ6=0.1。
通过虚拟控制律式(11)~(12)、实际控制律式 (13)、参数更新律式(14)~(19)以及给定的初始状态和参数值进行仿真,迭代次数k=50,仿真结果如图2~图7所示。
图2中误差随着迭代次数的增加逐渐趋于零,也证明了通过增加迭代次数,飞行器航迹倾角跟踪理想目标的精度越来越高。图3和图4的轨迹对比验证了飞行器航迹倾角在迭代50次后较无迭代时的跟踪效果更精确。图5~图7中控制律和参数更新律随迭代次数的变化值在[0,2π]上都是有界的。图2~图7的仿真结果进一步验证了本文控制方法的正确性和有效性。
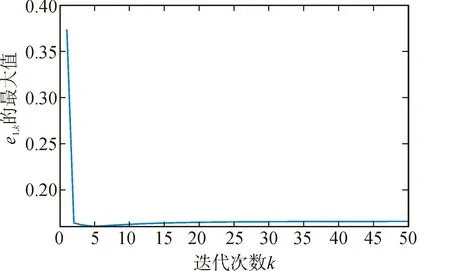
图2 e1,k随迭代次数的变化曲线图Fig.2 e1,k variation curve with the number of iterations

图3 无迭代时飞行器航迹倾角跟踪图Fig.3 Track inclination tracking diagram of aircraft without iteration
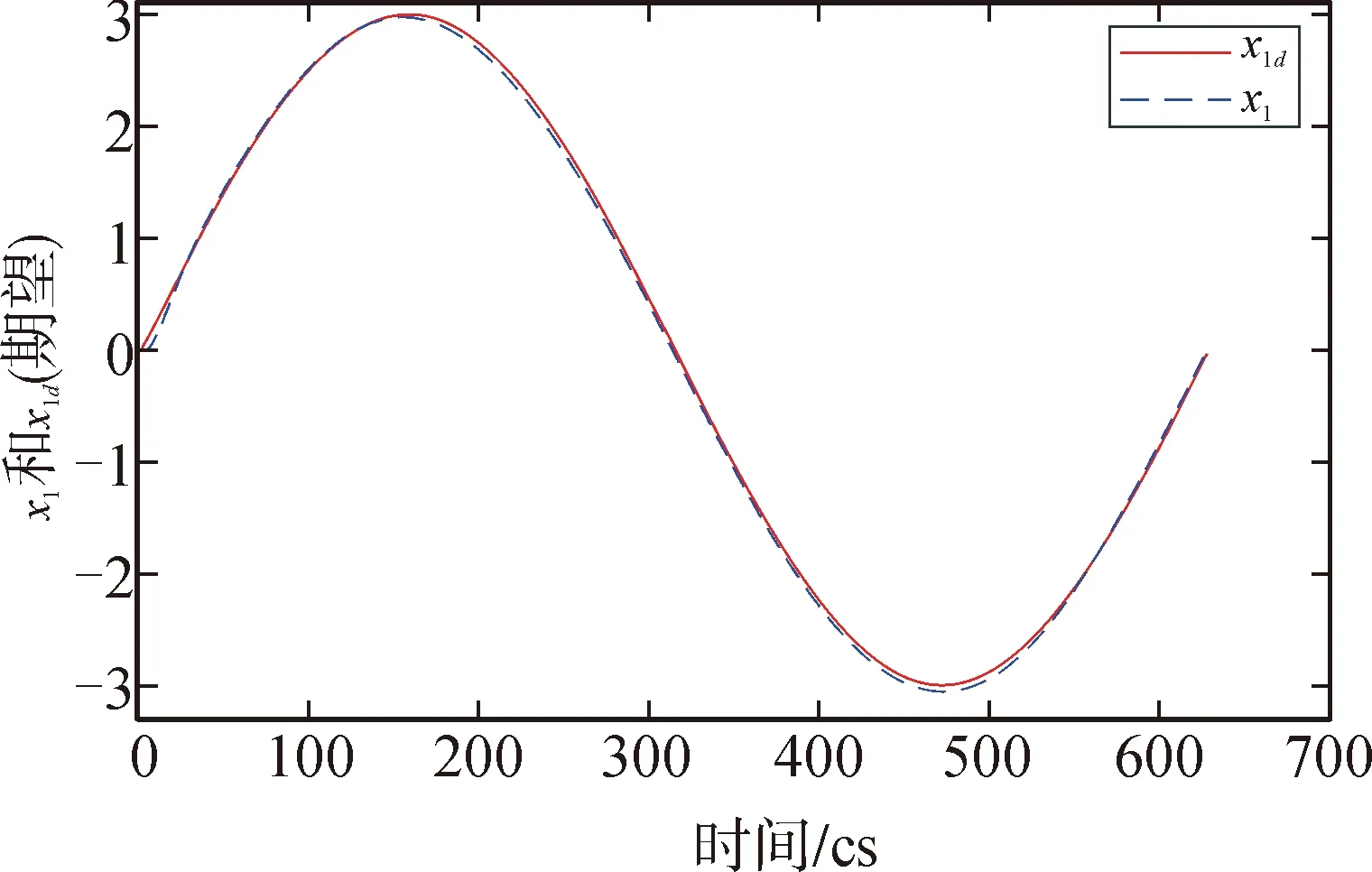
图4 迭代50次后飞行器航迹倾角跟踪图Fig.4 Track inclination tracking diagram of aircraft after 50 iterations

图5 控制输入‖uk‖随迭代次数的变化曲线图Fig.5 Control input ‖uk‖ variation curve with iteration times
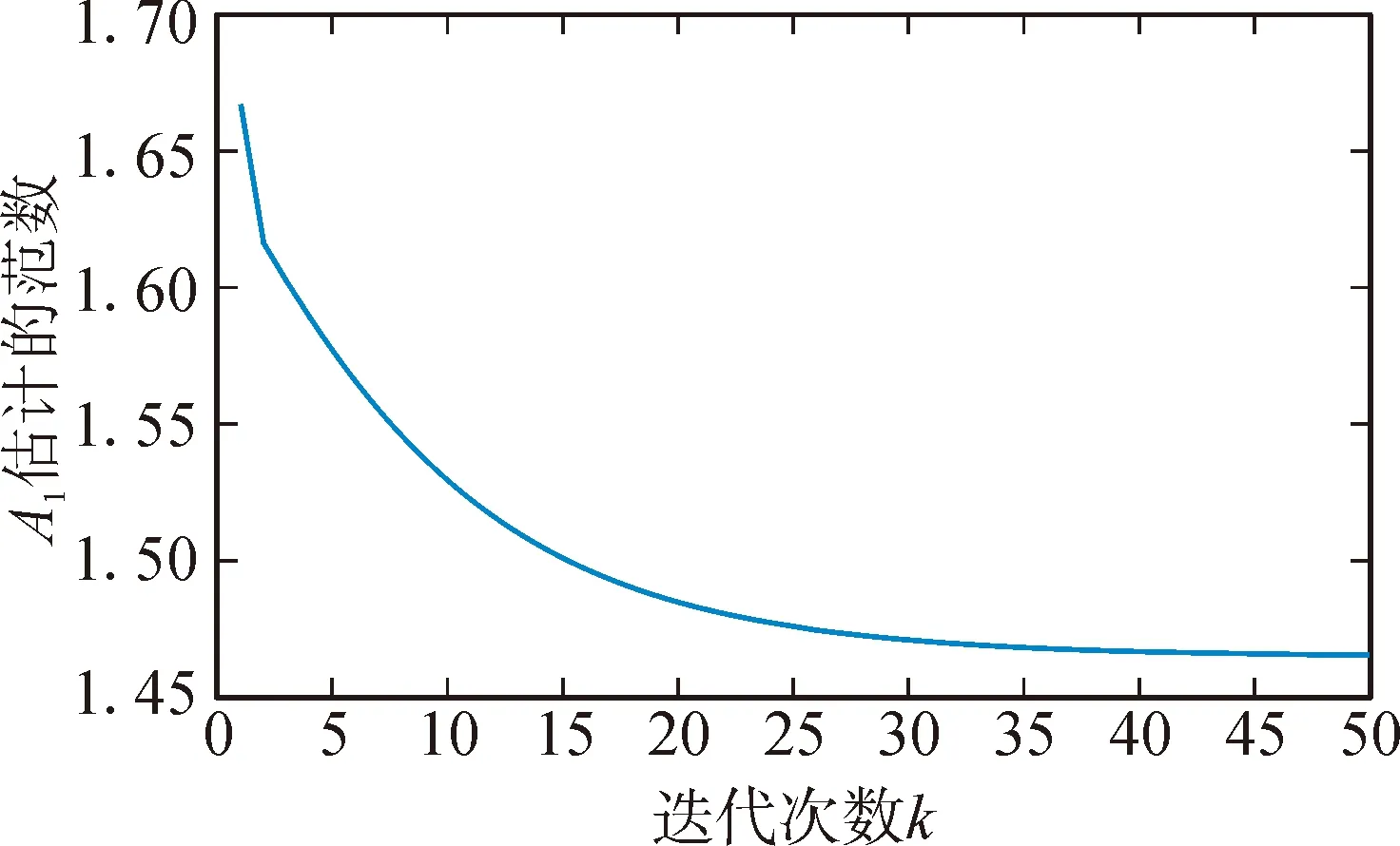
图6 随迭代次数的变化曲线图Fig.6 variation curve with the number of iterations
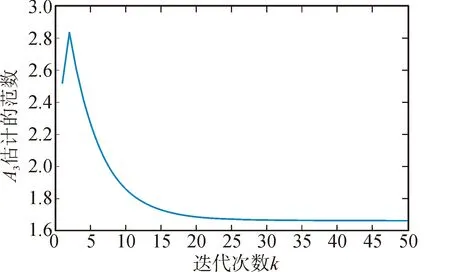
图7 随迭代次数的变化曲线图Fig.7 curve with the number of iterations
5 结 语
本文利用自适应迭代学习控制的方法对飞行器航迹倾角进行有限时间跟踪控制。通过调整相关参数,自适应迭代控制方法使得具有不确定项的飞行器航迹角系统能够实现有限时间高精度跟踪。针对该系统模型,采用收敛级数序列处理系统未知项,并通过反演设计的方法设计实际控制律。基于Lyapunov稳定性理论证明了所设计的控制器以及参数更新律在[0,T]上有界,并且系统的跟踪误差随着迭代次数的增加完全收敛于零。最后通过仿真验证了自适应迭代学习控制方法设计的控制器应用到飞行器航迹系统的有效性,成功实现了通过舵面偏角来控制航迹倾角的目的。
