高速磁浮交通轨道结构组成及其功能分析
2023-06-29徐浩蔡文锋胡连军
徐浩 蔡文锋 胡连军
高速磁浮交通是未来的重要发展方向,高速磁浮轨道结构是高速磁浮交通系统的关键组成部分。高速磁浮交通轨道结构选型及设计需要满足高速磁浮交通对其的功能要求,高速磁浮轨道交通对轨道结构的功能要求决定轨道结构的组成。为指导高速磁浮交通轨道结构选型与设计,通过研究高速磁浮交通对轨道结构的功能要求,系统分析了国内外高速磁浮交通轨道结构组成及其功能定位,提出了高速磁浮轨道结构选型建议,可为高速磁浮交通轨道结构选型、结构设计等提供依据。
高速磁浮; 轨道结构; 功能分析; 结构选型
U237 A
[定稿日期]2022-02-17
[基金项目]中国中铁股份有限公司科技开发计划(项目编号:2018-专项-02),中铁二院科技开发计划(项目编号:KYY2019031(19-22))
[作者简介]徐浩(1989—),男,博士,高级工程师,研究方向为高速重载轨道结构及动力学。
高速磁浮轨道交通,是一种利用电磁力实现无接触悬浮和导向运行、利用长定子同步电机实现高速牵引的高速轨道交通系统,属世界轨道交通的前沿技术。自1922年电磁悬浮原理被提出以后,各国对高速磁悬浮交通进行了尝试,经过100多年的发展,高速磁悬浮技术逐步实现了原理、试验到商业运营的过程,如德国的埃姆斯兰试验线、日本的山梨试验线、中国的上海高速磁浮示范线和中车四方磁浮试验线等[1-4]。随着沪杭、昆大、海南高速磁浮线的规划以及国家“十四五铁路科技创新规划”提出的开展600 km/h级高速磁浮系统的技术储备研发,高速磁浮轨道交通必然进入快速发展时期。
目前高速磁浮交通,主要有常导电磁悬浮、永磁电动悬浮、低温超导电动悬浮、高温超导电磁悬浮,不同的磁悬浮技术所采用的轨道结构也不相同。尽管国内外对高速磁浮轨道交通开展了大量研究,由于一般认为高速磁浮轨道交通无独立的轨道结构[5],因此高速磁浮交通轨道结构的研究较少,主要集中在高速磁浮交通轨道梁设计、车桥耦合动力响应或试验测试方面的研究[6-11]。随着我国600 km/h高速磁浮交通的发展和磁浮列车下线,有必要针对高速磁浮轨道结构开展研究。本文通过研究高速磁浮交通对轨道结构的功能要求,对比分析国内外高速磁浮交通轨道结构的组成及功能,从而为我国高速磁浮交通轨道结构选型和设计提供指导。
1 高速磁浮对轨道结构的要求
高速磁浮交通具有高速度、环保、能耗低、安全可靠等显著特点,为满足高速磁浮交通高速、安全、舒适的运营要求,高速磁浮交通要求支撑高速磁浮列车的轨道结构具有高平顺性和高稳定性要求。
1.1 高平顺性要求
高平顺的核心是高速磁浮轨道结构能保持良好的几何状态,其具体要求如下。
1.1.1 采用高精度和高可靠性的軌道部件
高速磁浮交通轨道结构主要由轨道功能件和轨道梁组成,轨道梁除了承受高速磁浮列车传递下来的荷载外,还引导高速磁浮列车向前运行;轨道功能件安装在轨道梁上,直接承受高速磁浮列车荷载。因此,高速磁浮轨道梁的高精度和高可靠,是轨道功能件几何形位保持的基础。
1.1.2 铺设高精度
高速磁浮轨道结构铺设高精度是保证轨道高平顺的首要条件,若高速磁浮轨道结构在铺设阶段出现了初始不平顺,随着高速磁浮轨道结构的服役时间增加,轨道初始不平顺将逐渐发展甚至恶化[12]。高速磁浮轨道结构一旦出现铺设精度的不平顺,不仅对后期运营影响很大,需要付出更多的维修工作量,有时还很难从根本上予以解决。高速磁浮交通轨道结构的铺设精度主要体现在轨道功能件,因此高速磁浮交通对轨道功能件的铺设精度误差需要控制在毫米范围内。
1.1.3 运营中不平顺高精度
为保证高速行车的舒适性和稳定性,必须控制高速磁浮交通轨道功能件的功能面不平顺度的限值,主要包括长波和短波误差。
1.2 高稳定性要求
高速磁浮轨道结构的稳定性是指高速磁浮轨道在其长期服役过程中保持轨道平顺性、完整性和结构功能的能力,即在高速磁浮轨道结构的服役寿命内能做到少维修甚至免维修。由于目前高速磁浮轨道结构一般采用预制构件,除采用桥梁支座调整外,无其他调整措施,因此高速磁浮轨道结构的稳定性一旦不能保证,一方面维修调整困难,另一方面也影响线路的正常运营和使用率。为保证高速磁浮轨道结构的高稳定性,高速磁浮轨道结构应满足几点要求:
(1)高速磁浮轨道结构部件应严格控制几何尺寸公差,满足高精度和高可靠性的要求,在轨道各部件安装组合后也能满足精度和可靠性要求,从而满足高速磁浮交通的高速度、高安全和高舒适性要求。
(2)运营过程中高速磁浮轨道结构的过大变形不仅影响轨道的平顺性,还会造成轨道部件受力过大,从而影响轨道各部件的耐久性,降低轨道结构的稳定性,因此要求高速磁浮轨道结构在列车、温度等多场耦合荷载作用下的变形应满足相关要求。
1.3 轨道结构功能要求
高速磁浮交通轨道结构作为实现磁浮列车支承、导向和牵引功能的主要结构,同时为了保证高速磁浮列车安全、平稳运营,轨道结构应满足几点功能要求:
(1)承力和传力要求。作用在轨道结构上的磁浮列车荷载、温度荷载等,需从轨道结构功能件传递至轨道梁,再传递至下部基础,要求轨道结构的传力路径明确、可靠。
(2)变形与变形协调要求。高速磁浮轨道结构在满足荷载的承力、传力功能时,必须能保持轨道结构的稳定,在整个轨道结构的服役寿命期内保持线路的高平顺性和高可靠性,不致产生过大的变形及其累积。
目前高速磁浮轨道结构的几何形位保持主要依靠轨道结构部件制作精度和安装精度,后期调整困难,且无法恢复至初始状态,因此需要提出适用于高速磁浮交通且具备调整几何形位能力的高速磁浮轨道结构。
(3)保持功能的能力要求。高速磁浮轨道结构制造精度极高,且后期不具备调整功能,一旦损毁,修复困难,因此要求高速磁浮轨道结构具有长时间保持功能的能力,即对高速磁浮轨道结构耐久性、可靠性有较高的要求。
(4)特殊功能要求。对于特殊地段或特殊环境下的高速磁浮轨道结构,需要有针对性地改进或优化措施,比如在沉降较大的地方,采用可调支座。
2 轨道结构组成及其功能分析
高速磁浮轨道结构在选型和设计之前,应进行高速磁浮轨道结构组成及其功能分析,即清楚不同高速磁浮轨道结构的结构组成以及各部件的功能与实现路径。本节主要针对目前应用的德国、上海采用的常导高速磁浮轨道结构和日本试验线上的低温超导高速磁浮轨道结构分析其结构组成与功能。
2.1 常导高速磁浮轨道结构
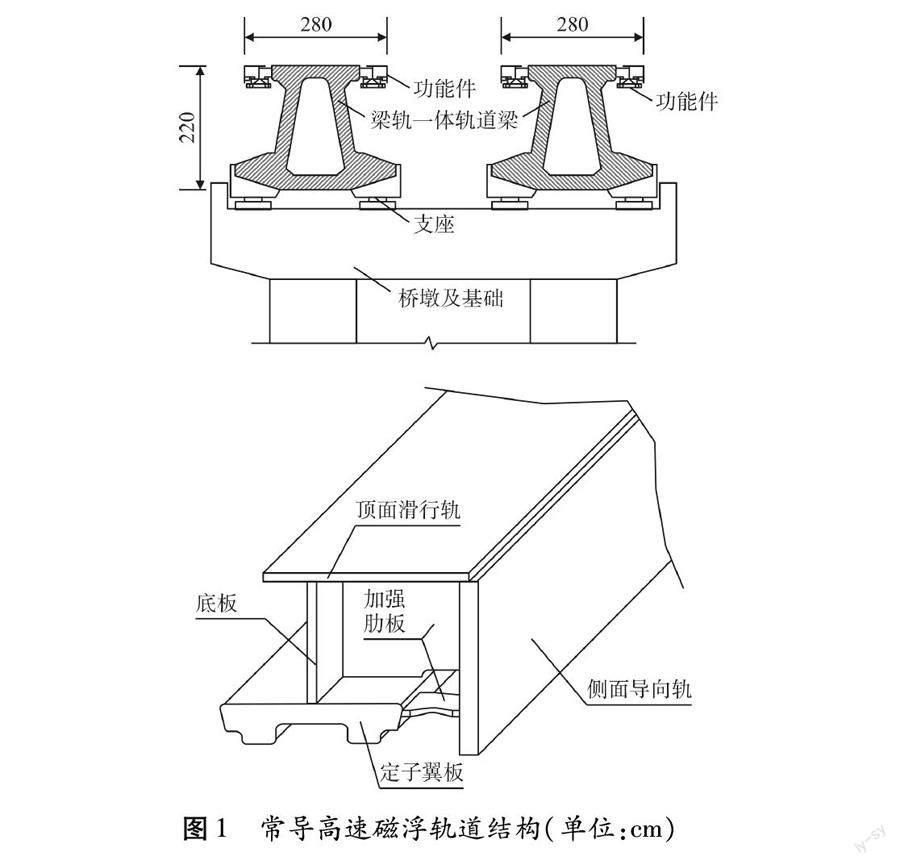
常导高速磁浮轨道结构由功能件和轨道梁组成,如图1所示。
常导高速磁浮轨道结构采用“梁轨一体式”设计[5],功能件为承力传力、稳定线路空间几何形位的主要部件。功能件直接承受磁浮列车产生的荷载,通过轨道梁传递至下部基础,同时功能件还起到磁浮列车导向和驱动的功能。功能件主要由顶部滑行板、侧面导向板和定子固定件组成,功能件的各组成部件及轨道梁的功能。
2.1.1 顶部滑行板
顶部滑行板在列车停止状态时对列车起支撑作用,在列车运行过程中,当悬浮架中2个悬浮控制电路出现故障或列车安全制动时,磁浮列车将通过滑撬降落在滑行板上,导向磁铁极靴或制动磁铁极靴接触导向板,滑行板承受机械支承力和摩阻力。
2.1.2 侧面导向板
侧面导向板使用软磁结构钢,也称为磁性导向板。在磁浮列车正常运行时,与列车上的导向电磁铁相互作用完成列车导向功能。
2.1.3 定子固定件
定子固定件用于安装直线电机定子铁芯,从而保证列车的悬浮。
2.1.4 轨道梁
用于安装功能件的轨道梁也称为导轨梁,主要是引导列车前进方向,同时承受列车荷载并将之传递至墩台基础,并且在其上部两侧预留安装功能件的连接件。
常导高速磁浮系统,车辆采用“抱轨”的运行方式,高速磁浮轨道结构的稳态悬浮间隙为8~13 mm,导向间隙为8~10 mm,由于常导高速磁浮的悬浮间隙较小,要求轨道梁的制造精度、变形与变位控制均为毫米级误差,因此常导高速磁浮轨道结构后期调整、养护维修困难。
2.2 低温超导高速磁浮轨道结构
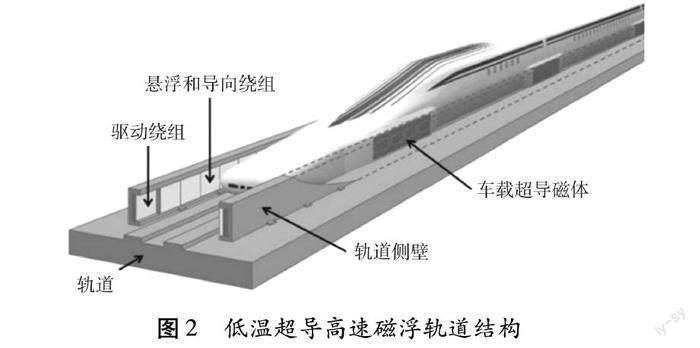
日本低温超导高速磁浮轨道结构的“U”字形轨道如图2所示,主要由轨道、轨道侧壁等组成。
“U”字形轨道结构将磁浮列车荷载传递至下部基础,而“U”字形轨道结构的底平面供列车行驶,底平面上的2个凸台称为走行路或车轮支承面,当磁浮列车启动加速度到120~150 km/h之前利用车轮支承面行驶,之后,磁浮列车悬浮行驶。
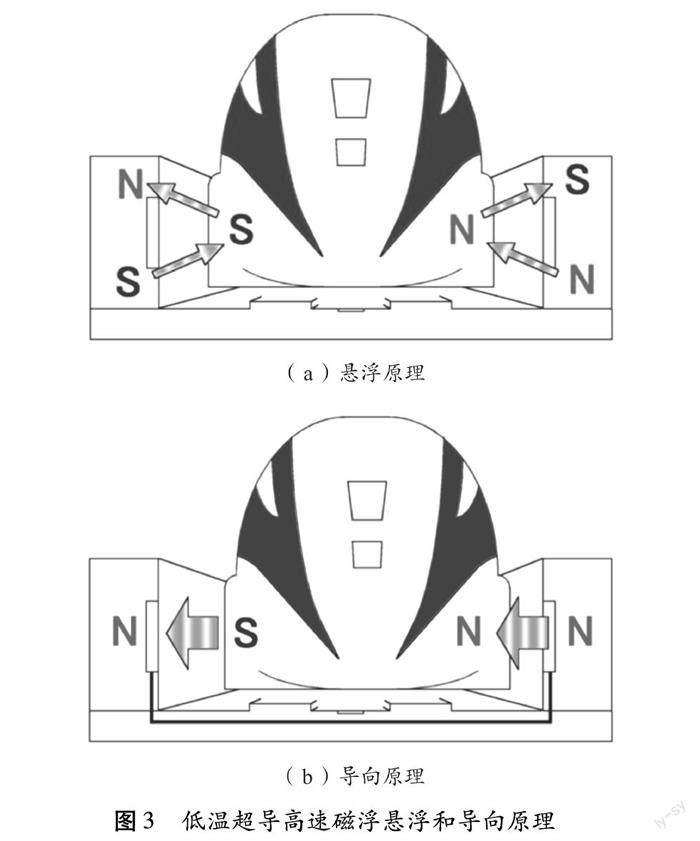
在轨道侧壁上安装有用于驱动的超导直线电机定子绕组及用于悬浮和导向的 “8” 字形零磁通线圈,从而起到悬浮和导向的功能。轨道侧壁上的悬浮线圈和导向线圈通过产生吸引力和排斥力,使高速磁浮列车保持在线路中心,如图3所示。在低速行驶时,需要导向车轮与侧壁接触实现强迫导向,侧壁梁上需设置导向面,该导向面设置在绕组上面。
由于磁浮列车高速运行时车侧壁与U形槽内侧壁8字形线圈表面的距离为10 cm,车底部与U形槽底板的间距大于10 cm,故低温超导高速磁浮轨道部件的加工和安装精度要求均低于悬浮间隙仅10 mm左右的常导高速磁浮系统,后期调整、养护维修工作量小。
3 结论与展望
通过研究高速磁浮轨道交通对高速磁浮轨道结构的要求,对比分析不同高速磁浮轨道结构的组成及其功能,得到几点结论:
(1)常导高速磁浮轨道结构制造精度要求高,后期调整、养护维修困难;低温超导高速磁浮轨道结构加工和铺设精度要求低,后期调整、养护维修工作量少。
(2)常导高速磁浮轨道结构目前已有实际应用,低温超导高速磁浮轨道结构目前正处于试验阶段,因此高速磁浮轨道结构应优先选用常导高速磁浮轨道结构。
(3)针对常导高速磁浮轨道结构制造精度要求高、工程投入大的问题,在后期研究中可以考虑引入调整结构,从而降低轨道梁的加工制造精度,降低工程造价。
参考文献
[1] 熊嘉陽, 邓自刚. 高速磁悬浮轨道交通研究进展[J]. 交通运输工程学报, 2021, 21(1):177-198.
[2] 余浩伟, 寇峻瑜, 李艳. 600 km/h高速磁浮在国内的适应性及工程化发展[J]. 铁道工程学报, 2020, 37(12):16-20+88.
[3] 周厚文, 陈旭. 我国发展高速磁浮必要性及发展战略分析[J]. 机车电传动, 2021(2):1-5.
[4] 孙玉玲, 秦阿宁, 董璐. 全球磁浮交通发展态势、前景展望及对中国的建议[J]. 世界科技研究与发展, 2019, 41(2):109-119.
[5] 龚俊虎, 谢海林, 鄢巨平. 高速磁浮梁轨分离式桥梁与轨道设计和创新[J]. 铁道科学与工程学报, 2021, 18(3):564-571.
[6] 杨国静, 郑晓龙, 李艳. 高速磁浮轨道梁结构选型研究[J]. 铁道工程学报, 2021, 38(2):68-73.
[7] Huang Jingyu, Wu Zhewei, Shi Jin, et al. Influence of track irregularities in high-speed Maglev transportation system[J]. Smart Structures and Systems, 2018, 21(5):571-582.
[8] 陈善游. 高速磁浮轨道梁行车时的垂向动力响应仿真分析[J]. 佳木斯大学学报(自然科学版), 2015, 33(6):922-924.
[9] Shi Jin, Wang Yingjie. Dynamic response analysis of single-span guideway caused by high speed maglev train[J]. Latin American Journal of Solids and Structures, 2019, 8(3): 33-37+45.
[10] 吴祥明. 磁浮列车[M]. 上海:上海科学技术出版社, 2003.
[11] 魏庆朝, 孔永健, 时瑾. 磁浮铁路系统与技术(第二版)[M]. 北京: 中国科学技术出版社, 2009.
[12] 赵国堂. 高速铁路无砟轨道结构[M]. 北京:中国铁道出版社, 2005.
