事件触发的时滞二阶多UAV 系统一致性控制*
2023-06-27付兴建
李 猛,付兴建
(北京信息科技大学自动化学院,北京 100192)
0 引言
随着无人机应用场景的逐步扩展,单个无人机由于感知能力有限,载荷不足,覆盖范围小等缺点,已经较难满足需求。人们受自然界中候鸟蜂拥、鱼类涡旋、萤火虫闪烁同步等群体行为启示[1],在实际的应用中将多个无人机进行协同控制,以此得到更高的执行效率以及完成更加复杂的任务,比如野火监控、商业表演、情报侦察、目标搜索等。
然而,多无人机系统在执行任务的过程中需要进行状态采样、信息传输、控制输入更新,而且每个无人机在处理信息时也需要一个过程,这样会导致多无人机系统存在一定的时滞。文献[2]对具有通信时滞的多智能体系统的群集运动进行了研究。
系统中无人机之间进行信息交互需要大量的通信资源,但是,网络带宽和无人机自身的能量都是有限的,这就给多无人机系统造成重大负担。为了节约有限的通信资源,许多研究者提出采样数据控制,文献[3-4]在采样数据控制的基础上研究对多智能体系统的控制。
Dimarogonas 等首次将事件触发控制应用到多智能体系统中。为了减少通信次数,事件触发控制策略在多无人机系统中得到广泛研究。文献[5]研究了带有输入时滞的线性多智能体系统的事件触发一致性问题。文献[6-10]研究了非线性多智能体系统在事件触发机制下的一致性问题。文献[11-16]研究了二阶多智能体系统在事件触发下的一致性控制。随机采样的事件触发控制协议可以有效地减少数据传输[15]。
受上述启发,本文考虑在事件触发下不完全随机采样的基础上,研究了既包含时滞又受到非线性因素影响的二阶多无人机系统能够达到一致性控制的问题。首先,本文考虑到在实际多无人机系统应用中通信资源有限,提出了在事件触发机制下不完全随机的混合采样,相比于周期采样,这样的采样方式更加有利于此类系统;其次,在实际应用中的系统一般会受到非线性因素影响,所以本文使用了带有非线性项的动力学模型,同时在研究中加入固定的输入时滞;给出了事件触发机制下的多无人机系统控制策略,在减少无人机之间的通信量和减少系统计算量的同时,使此系统完成一致性控制;最后,通过理论证明和仿真验证了控制策略的可行性。
1 系统描述
本文考虑一个由n 个无人机构成的多无人机系统,该系统拓扑图G 仅含一棵有向生成树,,称图G 的节点集;W 为图G 中无人机之间的权重矩阵,其元素wij表示无人机i 与无人机j之间的权重。当且仅当有向通信拓扑图G 包含一棵有向生成树时,相应的Laplacian 矩阵恰好有一个为0 的特征根,并且该矩阵的其他非0 特征根的实部全为正。无人机的运动区域为三维空间,如果把无人机看成三维空间中的质点,在地面坐标系(地轴系)下,系统中无人机i 的位置状态向量和速度状态向量皆为三维列向量。
系统中无人机i 的二阶动力学模型如下:
定义1:基于非均匀采样的二阶时滞多无人机系统如果满足下列条件,则系统(1)能够达到一致性
注1:本文主要研究事件触发机制下的多无人机系统一致性问题,可以把无人机看作质点进行相关研究,使其在给出的算法下各个无人机的状态信息达到一致。由于本文不研究多无人机编队队形的控制,所以不需要无人机位置状态偏差量为一个非零常量。只研究多无人机系统状态一致性的控制,那么定义1 中的式(2)为目标函数是合理的。
注2:根据众多参考文献,在实际应用中各种控制指令不能够连续执行,并且多无人机系统在一致性控制过程中,初始几秒状态幅值波动最大,在控制器调整下后续幅值波动较小,并且随机采样的采样间隔在一定范围内无法确定每次的间隔大小,而以固定小间隔采样可以保证每次都以足够小的时间间隔进行,但控制过程始终使用固定间隔采样是没有必要的,所以本文在减少采样次数情况下选择在不同时段采用不同的采样方式,以此让采样信息更加准确地反映实际状态信息。
2 主要结果
2.1 事件触发机制与控制协议
考虑到在多无人机实际应用系统中并不需要进行完全的周期性触发,而且事件触发的随机采样虽然有一定优点,但是其阈值一般需要不断进行计算,所以设计一种可以不仅依赖于无人机状态信息,还依赖于时间触发时刻的触发机制,阈值在两次事件触发之间只需要计算一次,不需要连续计算。
在事件触发机制式(4)下进行控制器的设计,需要考虑系统(1)中存在固定输入时滞以及受到非线性因素的影响。假如无人机i 利用采样信息更新控制输入的时刻如下
则无人机i 的事件触发时刻为
其中,k0代表控制增益;k1,k2分别是位置和速度状态误差的放大系数;为大于0 的常数。
2.2 算法分析
为了得到一致性控制主要结论,进行以下分析:

那么式(2)等价于
令
则通过Kronecker 内积,系统(1)的紧凑形式如下
式(9)中,
则式(9)转化为式(10)
通过Newton-Leibnitz 公式可知
将式(10)代入式(11)得

下面分析会用到这些参数。
引理1[15]:如果矩阵P1的所有特征根的实部全为负,那么可以选择两个合理的正实数β≥1 和γ>0 满足

特征根Mij的实部为负。
定理1:当假设1 与假设2 成立,系统的控制增益k0、k1、k2满足式(15),并且系统中各无人机自身采样间隔在区间(0,ξ)之内,那么控制策略(6)和事件触发机制(4)在系统(1)中是可行的,即多无人机系统能够达到一致性,并且因为采样间隔一定是为正且不为无穷小的,则此系统不可能引发芝诺行为。
证明:为了证明系统(1)能在本文控制策略下达到一致,即式(8)成立,将对式(13)进行微分方程求解并取范数得
同时根据范数性质可得到
由式(17)和式(18)可得


那么
结合式(25),对式(26)进行反证可知其成立
由此可知式(8)成立。
3 数值仿真
为验证本文控制算法的有效性,本小节将进行以下仿真实验。
稳态调节是对动植物生命活动的调节,在植物生长过程中会通过生长素或其他相关激素来对其生命进行调节,而动物则会利用体液和神经调节的方式进行有序的生命活动。在种植水果或蔬菜时,人们会利用催熟剂来促进植物快速生长,如乙烯具有催熟果实的重要作用。而人在调节身体平衡状态时,都是通过自身免疫力的调节来预防疾病发生,如食用维生素。以上都是生活中常见的稳态调节。
实验1:以4 架无人机系统的仿真来证明本文多无人机系统一致性理论结果的正确性。依据上述引理和文中条件并且参考文献[15]可以选取参数为k0=1.25,k1=1,k2=1.25,ρ=0.05,α=0.32,b1=0.6,b2=0.8,=0.002 s 非均匀采样间隔位于区间[0.005,0.015)且h=0.005,T1=2。分别表示智能体i 的位置状态信息和速度状态信息,其初始值从区间[-100,100]与[-10,10]中随机产生如下:
根据以上信息进行Matlab 数值仿真,如图1~图2所示。
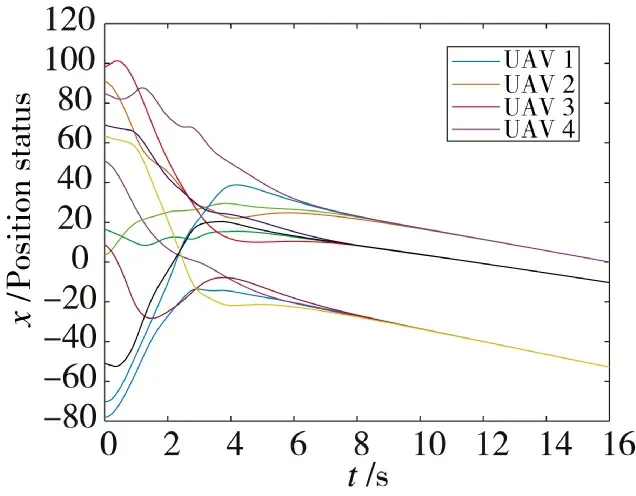
图1 实验1 条件下多无人机位置状态演化过程Fig.1 Position state evolution process of multiple UAVs under experiment 1 condition
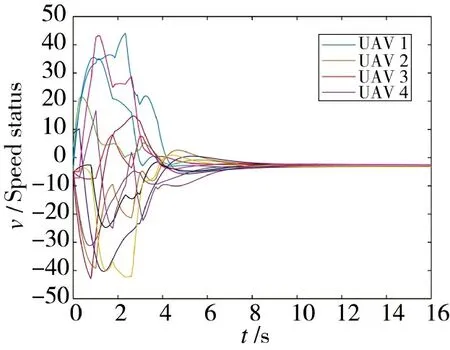
图2 实验1 条件下多无人机速度状态演化过程Fig.2 Evolution process of velocity state of multiple UAVs under experiment 1 condition
实验2:在实验1 的基础上只改变k2,其他参数不变。其中,k2=2 时的仿真图,如图3~图4 所示。
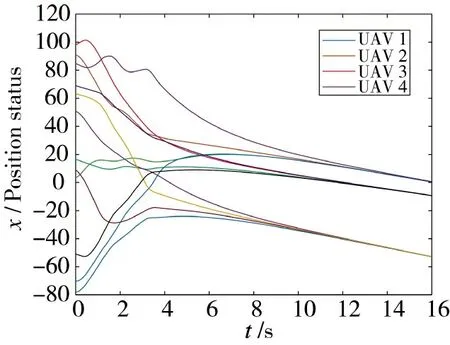
图3 实验2 条件下多无人机位置状态演化过程Fig.3 Position state evolution process of multiple UAVs underexperiment 2 condition
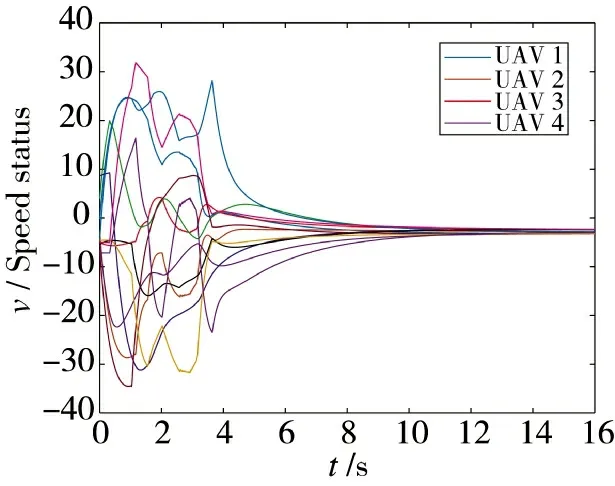
图4 实验2 条件下多无人机速度的状态演化过程Fig.4 Evolution process of velocity state of multiple UAVs under experiment 2 condition
多次改变k2值后进行仿真,仿真图不再一一列出,对其结果统计如表1 所示。

表1 不同k2 值情况下的系统仿真结果Table 1 System simulation results under different k2 values
实验3:在实验1 的基础上改变k1,使k1>k2,令k1=2 的仿真图,如图5~图6 所示。
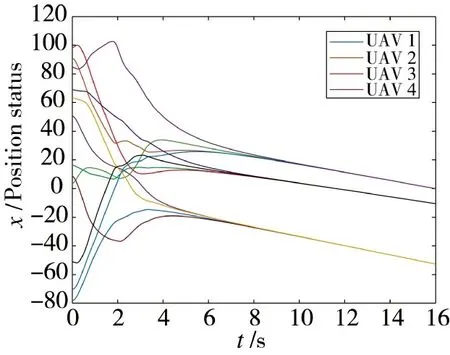
图5 实验3 条件下多无人机位置的状态演化过程Fig.5 Position state evolution process of multiple UAVs under experiment 3 condition
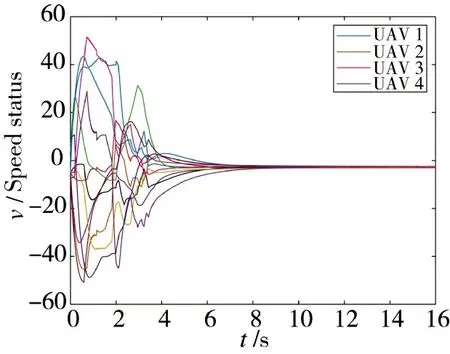
图6 实验3 条件下多无人机速度的状态演化过程Fig.6 Evolution process of velocity state of multiple UAVs under experiment 3 condition
实验4:把实验1 的无人机数量改为9 架,其他参数不变进行仿真实验。9 架无人机的位置和速度状态初始值由程序从区间[-100,100]与[-10,10]中随机产生,令无人机之间的权重矩阵W 和仿真图如图7~图8 所示。
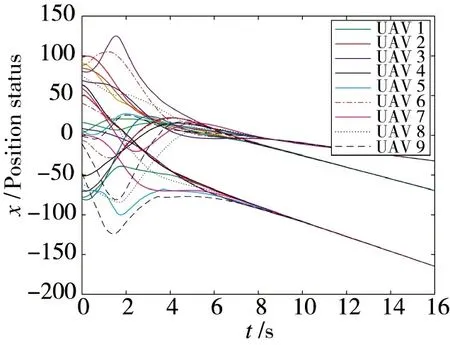
图7 实验4 条件下多无人机位置的状态演化过程Fig.7 Position state evolution process of multiple UAVs under experiment 4 condition
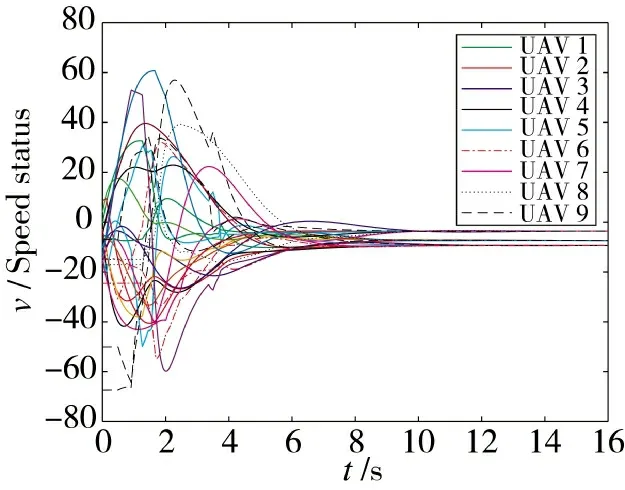
图8 实验4 条件下多无人机速度的状态演化过程Fig.8 Evolution process of velocity state of multiple UAVs under experiment 4 condition
分析:由实验仿真结果可知系统中各个无人机的三维位置状态和速度状态皆趋近于一致,验证了算法的有效性。经过多次仿真实验知k1,k2对系统影响较大,所以对其进行了详细分析,由实验2 可知在实验1 其他参数满足本文条件且不变的情况下,k2∈(1,2)则系统能够更快的达到一致性;通过图2 与图6 对比,可见图6 速度状态波动更加剧烈,从系统稳定性的角度考虑应该使k1<k2。
本文与文献[15]相比,两者的事件触发阈值均是状态与时间结合,但与之不同的是本文阈值只与采样时刻相结合,由实验1 和实验4 的仿真结果可见两者的事件触发机制有相近的控制性能,增加无人机的数量不会影响本文算法的控制效果,而且事件触发阈值不需要连续进行计算,仅仅在事件触发时刻计算一次,作为下次事件触发的阈值,在本文研究的系统中更具优势。除此之外,本模型考虑了非线性因素的影响,并且控制算法考虑了输入时滞,如此与实际的多无人机系统更接近。
4 结论
本文研究了事件触发机制下带有固定输入时滞的二阶多无人机系统在不完全随机采样下的一致性控制问题,并提出阈值不仅依赖于状态,还依赖于事件触发时刻的事件触发机制,如此避免了状态依赖型阈值较小以及随机采样在两次事件触发之间不断计算阈值的缺陷,同时还能够减少无人机之间信息交互。控制输入的状态信息依赖于采样,由于采样间隔严格大于零,那么事件触发间隔严格大于零,系统就避免了芝诺行为,并且减少了控制输入的更新。通过对算法进行分析以及仿真实验结果验证了结论的正确性。
