无人机在消防灭火救援中的应用
2023-06-26费洪杰
费洪杰
摘要:合理规划无人机路线有助于提高消防灭火救援能力。对无人机在消防灭火救援中的具体应用进行实验研究,结果表明,无人機在消防灭火救援中的应用效果较好,可准确求解出着火点三维坐标,同时规划出3个着火点的最短路径,成功避开障碍物,并准确到达着火点,进而实施消防灭火救援任务。
关键词:无人机;消防灭火救援;应用效果;着火点识别;路径规划;PID控制
火灾发生时,灭火救援的速度直接影响着人民群众的生命财产安全。为此,许多学者着力研究消防灭火救援中相关的技术,如闫家伟等将智能视频分析技术应用在消防灭火救援中[1],通过该技术识别出早期火灾事故并发出警报,救援管理部门可根据火灾事故视频,及时调整灭火救援方案。李朋朋等将卫星通信技术应用在消防灭火救援中[2],利用该技术可构建消防救援网络以保证消防救援通信稳定。上述技术在火灾防控方面具有很好的应用效果,但在消防灭火救援中,其提供的火灾事故现场基础数据仅能起辅助作用。
无人机包括救援设备、飞机机体、飞控系统等。无人机搭载的摄像头可拍摄清晰的火灾事故现场全景,消防救援管理部门根据采集的火灾事故数据,将无人机与消防队员结合在一起,能够制定出合理的救援方案。在消防灭火救援中,利用无人机可保证操作员和救援人员的安全,提升救援效率。特别是近几年,火灾发生率逐年升高,将无人机应用在消防灭火救援中,能够取得较好的效果,因此对无人机在消防灭火救援中的具体应用进行深入研究,具有积极意义[3-4]。
1 无人机在消防灭火救援中的应用
1.1 无人机火灾着火点定位方法
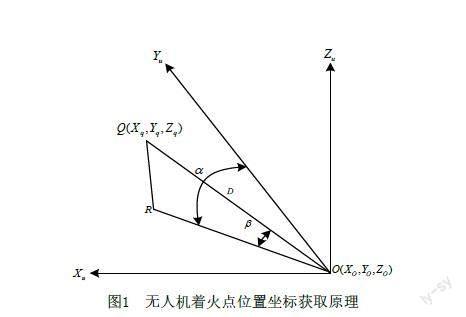
无人机通过搭载摄像头采集城市遥感图像,并经无线通信网络将采集的城市遥感图像发送至控制中心。控制中心利用方向梯度直方图提取遥感图像的形态纹理特征后,通过支持向量机方法按照特征结果对城市遥感图像实施分类,识别出火灾和非火灾的城市遥感图像。当识别出发生火灾的城市遥感图像时,控制中心向控制器传达停止命令,使无人机暂时悬停,计算着火点位置坐标。无人机着火点位置坐标获取原理,见图1。
设置无人机的摄像机、GPS接收机、微波测距仪都位于设定坐标点上。
利用微波测距仪测量着火点和仪器间的距离,其测距公式如下:
其中:传播时间用t描述,传播速度用v描述。
采用控制器可获取Yu轴和摄像机水平方向OR投影的夹角a,同时获取o(Xo,Yo,Zo)坐标系中XuYu水平面和摄像机光轴OQ的夹角β。将获取相关数据传输至控制中心,通过该中心可求解出着火点坐标为Q(Xq,Yq,Zq),其表达式如下:
1.2 无人机路径规划方法
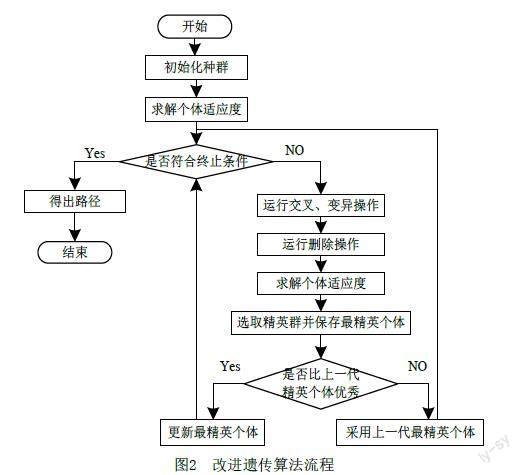
无人机在消防灭火救援中路径规划也是非常重要的环节。在明确着火点坐标后,采用改进遗传算法合理规划无人机在消防灭火救援中路径,以救援路径最短、合理规避障碍物为目标,并准确到达着火点实施救援任务。该算法的流程,见图2。
由图2可知,改进遗传算法流程主要包括初始化种群、求解个体适应度,当个体适应度中精英个体满足终止条件后,得出无人机消防灭火救援路径。当不符合终止条件时,需要对个体实施交叉、变异、删除等操作后求解个体适应度,并选取精英群体中最优精英个体,直到符合终止条件后结束。
1.2.1 初始化种群
将无人机应用在消防灭火救援中,可提高消防灭火救援能力,无人机利用摄像头采集城市环境信息的实时数据后,采用改进遗传算法合理规划无人机消防灭火救援路径。在路径规划中,用1个个体描述每个从起点到终点的无碰撞路径,各个体里包含1条染色体。通过将全部个体集合构建无碰撞路径种群。初始化种群过程为:
设置无人机的消防灭火救援路径用Qj描述,其公式如下:
其中:第j段路径用(qj-1,qj)描述,起点用q0描述,终点用qgoal描述,路径用节点序号用j描述,第j个路径节点用qj描述,当无人机位于qj点时,以救援路径最短为目标,选取合适路径点qj+1,其公式如下:
其中:终点x轴、y轴坐标分别用qxgoal、qygoal描述,qj点x轴、y轴坐标分别用qxj、qyj描述,qj+1点x轴、y轴坐标分别用qxj+1、qyj+1描述。
qj+1点y坐标、x坐标的公式为:
上述过程可提高无人机接近终点的速度。
1.2.2 个体适应度函数
通过求解个体适应度函数选出最优精英个体,满足路径最短的目标,提高无人机避障能力。个体适应度函数求解流程为:
种群内包含N个个体,Qj个体适应度函数用Fitness(Qj)描述,其公式如下:
其中:采样点函数数量用Number(Qj)描述,第二部Number(Qj)分在整体所占比重用m2描述,在路径的总长度函数用Length(Qj)描述,第一部分Length(Qj)在整体所占比重用m1描述。
Number(Qj)表达式为:
其中:正整数用θ描述。
在路径Qj上选取用qk表示路径点,该点离障碍点Bar距离Lqk_Bar如下式:
其中:障碍点Bar的x坐标、y坐标分别用Bxar、Byar描述,路径点qk的x坐标、y坐标分别用qxk、qyk描述。
如果:
则令
其中:路径Qj上采样点中符合条件的采样点函数数量Number(Qj)大于无人机半径定值用描述。
经分析可知适应度函数包括Length(Qj)和Number(Qj),当函数值越小表示为精英个体,其路径性能越高。
当不符合终止条件时,需要在种群中路径的交点处实施大概率交叉操作,提高个体更新速度,保证路径连续性。再通过随机变异选取最优路径,采用删除冗余节点可缩短路径长度,最后求解个体适应度函数,挑选出各代种群内精英子种群,并从中选出用minFitness(Qj)表示函数值最小个体精英,最优路径用Qoptimal path描述,若下一代个体函数值低于则需要更新路径,若不是继续保留,作为最优无人机消防灭火救援路径。
1.3 无人机消防救援喷洒的定量控制方法
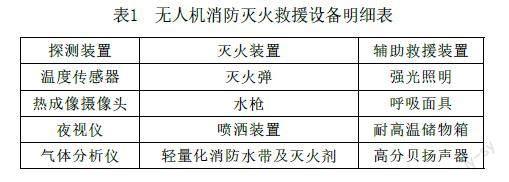
在采用改进遗传算法合理规划无人机在消防灭火救援中路径后,无人机到达消防灭火救援地点实施消防灭火救援任务。无人机自带消防灭火救援设备,救援设备明细,见表1。
由表1可知,无人机消防灭火救援设备主要包括探测装置、灭火装置、辅助救援装置。其中灭火装置中喷洒装置按照火灾类型和火势大小实施喷洒任务。在进行消防灭火救援喷洒任务时,无人机消防灭火剂喷洒量的控制至关重要,因此采用PID控制方法针对不同火灾具体情况控制无人机灭火剂喷洒量,可提高灭火效率,缩短灭火救援时间。灭火剂喷洒量PID控制流程见图3。
由图3可知无人机的灭火剂喷洒量PID控制流程,通过控制器实现对无人机的灭火剂喷洒量,设置用表示灭火喷洒装置喷头灭火剂的压力,反馈值用描述。喷灭火剂的压力传递函数表达式如下:
其中:实际灭火喷洒装置喷头灭火剂压力系数,常量用h表示。
当无人机电压稳定在0~10V时,灭火装置喷头最大压力为6MPa,则PID反馈值系数如下:
传递延迟函数表达式如下:
其中:实际和期望喷洒量偏差用描述,比例系數用描述,喷洒量系数用描述。
经PID压力反应后得出下式:
其中:实际灭火剂喷洒量用w(x)描述,频率用f描述;喷洒距离用描述。
综上所述,在求出PID各项控制参数值后,按照无人机灭火喷洒装置喷头的压力监测数据,依据实际和期望喷洒量偏差分析喷洒灭火剂喷洒量,通过PID反应压力机制调节无人机灭火剂喷洒量,完成精准灭火剂喷洒任务,提高无人机消防救援效率。
2 实验与结果分析
无人机在正常巡检过程中,可通过无人机摄像头拍摄到试验对象发生的城市火灾事故图像,并将城市发生火灾事故图像及时传输至城市消防管理部门系统。
无人机拍摄的城市发生火灾事故图像清晰,经无人机控制中心利用方向梯度直方图提取遥感图像的形态纹理特征后,通过支持向量机方法按照特征结果对城市遥感图像实施分类,识别出火灾和非火灾的城市火灾事故图像,并标记出该试验对象区域存在三处着火点,并将城市发生火灾事故图像及时传输至城市消防管理部门系统。
按照图像从左至右顺序,依次为着火点1、着火点2、着火点3,采用本文方法对三处着火点实施定位。着火点定位结果,见表2。
分析表2数据可知,在应用本文方法进行3个着火点定位时,无人机测量着火点实际三维坐标与实际值非常接近,仅有着火点1的X、Y坐标和火点2的X坐标与其实际坐标存在微小偏差,偏差数值较小,平均误差约0.03m。上述结果说明:本文方法具备较为准确的城市着火点定位能力,可满足城市火灾监测要求。
在明确3个着火点坐标后,采用改进遗传算法合理规划无人机在消防灭火救援中路径,以救援路径最短为目标,规避障碍物,并准确到达城市着火点实施救援任务。
改进遗传算法的无人机在城市消防灭火救援路径规划结果,见图4。
采用改进遗传算法的无人机在城市消防灭火救援中路径规划效果较好,能够成功避开障碍物,分别规划出到达3个着火点的最短路径,并准确到达城市着火点,节省城市消防灭火救援的时间。
3 结论
针对消防灭火救援存在装备技术落后的问题,本文提出将无人机技术应用在消防灭火救援中,并分析其应用效果。实验结果表明,无人机采集城市图像,可迅速识别出城市火情,获取城市火灾情况,并将识别结果发送至指挥部门,指挥部门安排无人机进行城市消防灭火救援,在应用本文方法进行3个着火点定位时,无人机测量的火点实际三维坐标与实际值非常接近,平均误差约0.03m。本文方法具备较为准确的城市着火点定位能力,可满足林火监测要求,并在合理规划路线后,实施喷洒消防干粉灭火剂任务,成功扑灭城市火灾,保护住宅区的人员安全。
参考文献:
[1]闫家伟,张苗,宋文华.智能视频分析技术在火灾防控中的应用[J].南开大学学报(自然科学版),2021,54(3):108-112.
[2]李朋朋.卫星通信技术在消防救援中的应用研究[J].电视技术,2021,45(10):76-78+83.
[3]黄书召,田军委,乔路,等.基于改进遗传算法的无人机路径规划[J].计算机应用,2021,41(2):390-397.
[4]李鸿一,陈锦涛,任鸿儒,等.基于随机采样的高层消防无人机协同搜索规划[J].中国科学:信息科学,2022,52(9):1610-1626.
The application of drones in firefighting and rescue
Fei Hongjie
(Tianjin Jinan District Fire and Rescue Division,Tianjin 300000)
Abstract: Reasonable planning of UAV routes helps improve firefighting and rescue capabilities. The specific application of UAV in firefighting and rescue is experimentally studied, and the results show that the UAV has a good application effect in firefighting and rescue, which can accurately solve the three-dimensional coordinates of the fire point, while planning the shortest path to three fire points, successfully avoiding obstacles and accurately reaching the fire point, and then implementing firefighting and rescue tasks.
Keywords: UAV; firefighting and rescue; application effect; fire identification; path planning; PID control
