运载火箭发射窗口的两种碰撞评估方法比较
2023-06-25王啸臻
崔 文, 张 炜, 王啸臻
(西安卫星测控中心, 西安 710043)
1 引言
随着人类航天事业的加速发展和航天活动的日益频繁,在轨空间目标(航天器、火箭箭体和空间碎片等)的数量不断增加,空间碎片环境有进一步恶化的趋势。截至2022 年11 月,美国SPACE-TRACK 网站公布的可跟踪在轨空间目标总数接近21 000 个。据统计,有超过10 万个直径大于1 cm 的空间目标在轨运行,直径小于1 cm 的微小碎片则数以百万计[1]。空间目标数量的急剧增加使其与进入空间的目标和已经在轨运行的目标之间发生碰撞的风险明显增加,对航天器的正常运行、运载火箭的发射和近地空间的可持续发展构成了严重、持续且广泛的威胁。航天史上已经发生多次空间目标之间碰撞的实例。例如,1996 年7 月24 日,欧空局Ariane 火箭碎片撞断了法国Cerise 卫星的重力梯度杆;2009 年2月11 日,美国铱星-33 和俄罗斯宇宙-2251 卫星发生相撞等[2-3]。经计算可知,空间目标之间的碰撞速度一般可达10 km/s,10 g 重量的空间目标与航天器碰撞产生的动能相当于小轿车以100 km/h 的速度撞击产生的动能。因此可以确定,厘米级以上的空间目标碰撞带来的危害是巨大且不可承受的。
空间目标发生在轨碰撞对太空环境造成的影响和破坏是长期性的。为了保持太空环境的长期可持续发展利用,世界各航天大国已经在空间目标碰撞评估及预测方面展开行动。同时,为了避免在发射过程中出现碰撞风险,联合国和平利用外层空间委员会在《外层空间活动长期可持续性准则》中建议:应该对拟发射的空间物体进行发射前的交会评估,以避免在发射期间与空间目标有可能发生碰撞的风险[4]。
运载火箭发射前与空间目标的碰撞评估分析工作是针对给定运载火箭发射窗口,利用其发射前的理论飞行轨迹,计算其与在轨空间目标之间的交会距离小于给定的安全阈值的情况。目前,都是针对在轨运行航天器与空间目标之间的碰撞风险分析研究。白显宗等[5]归纳综述了空间目标碰撞预警分析涉及的接近分析、轨道误差协方差分析及碰撞概率计算关键问题等理论研究进展;秋宏兴等[6]研究了航天器与其它空间目标碰撞分析的初选准则和碰撞预报方法;周威萍等[7]研究了空间目标碰撞概率阈值确定过程中的误差协方差矩阵确定方法、碰撞概率计算以及碎片通量计算方法;白显宗等[8]研究了接近距离、轨道误差、接近角度及目标大小等因素的误差对碰撞概率分析的影响;Zhang 等[9]提出了一种碰撞概率边界选择方法,并研究了碰撞风险与时间、轨道高度、碰撞高度及速度等因素的关系。而针对运载火箭发射前开展交会评估的研究较少。马志昊等[10]研究了航天发射中空间碎片碰撞预警分析涉及的关键技术;Golubek 等[11]研究了航天发射交会平均概率与目标轨道倾角、轨道碎片数量和交会相对距离的相关性。两者的不同之处在于:由于运载火箭的发射窗口一般都在10 min 以上,按照1 s 的时间间隔,其对应的飞行轨迹就在600条以上,开展运载火箭发射前的交会评估工作,就需要计算至少600 条飞行轨迹与所有空间目标的交会情况;而在轨运行航天器的飞行轨迹是相对固定的,因此其碰撞风险评估的计算量与前者相比要小得多,但两者的计算精度要求是相同的。此外,发射前的交会评估工作一般要求在1 h 内完成。若仍采用传统的航天器碰撞评估方法开展运载火箭发射前的交会评估,是难以满足高时效性和高精度要求的。
鉴于上述原因,针对运载火箭理论飞行轨迹特点和空间目标在轨运行规律,本文提出2 种针对运载火箭发射窗口的碰撞评估方法,并比较这2 种方法的计算效率及应用场景,有效解决运载火箭发射前与空间目标评估对高时效性和高精度的需求。
2 发射窗口碰撞评估方法
在给定的发射窗口时段内,运载火箭发射窗口碰撞评估即筛选出符合条件的安全发射窗口时刻,一般安全筛选条件为:运载火箭与所有空间目标之间的交会距离大于给定的安全阈值。针对该要求,提出了2 种碰撞评估方法。
2.1 评估方法一
1)在给定的发射窗口时段[t0,t1] 内,已知运载火箭飞行时间长度为T,T为实际飞行秒数向上取整,其在WGS84 坐标系下第i秒的空间位置为[x0i y0i z0i] ,其中i=1,2,…,T;已知所有m个空间目标的TLE 根数,基于SGP4/SDP4 模型[12],按照1 s 的时间间隔,计算其在[t0,t1+T]时段内J2000 惯性坐标系下的空间位置,记为[xjk yjk zjk] ,其中j= 1,2,…,m(j代表空间目标的序号),k= 1,2,…,M(k代表空间位置的序号,M=t1+T-t0),每个空间位置对应的时刻记为tjk。
2)在发射时刻tl=t0+ Δt,其中Δt= 0,1,2,…,L(L=t1-t0),将运载火箭在WGS84 坐标系下的空间位置[x0i y0i z0i] 转换为J2000 惯性坐标下的空间位置 [x0li y0li z0li] , 其中[xoli yoli zoli]T=R[x0i y0i z0i]T,R为WGS84坐标系到J2000 惯性坐标系的转换矩阵。
3)根据步骤(1)中[t0,t1+T] 时段内m个空间目标J2000 惯性坐标下的位置[xjk yjk zjk] ,根据发射窗口tl时刻的运载火箭飞行时段,挑选出所有m个空间目标的位置序列, 记[xj(i+s)yj(i+s)zj(i+s)],j=1,2,…,m,i=1,2,…,T,其中s满足tjs+1=tl,s为[0,M- 1] 之间的整数;根据运载火箭位置[x0li y0li z0li] 和第j个空间目标位置[xj(i+s)yj(i+s)zj(i+s)] ,则可计算2 个目标之间的相对距离见式(1)。
4)根据步骤(3)中的相对距离dli序列,采用拉格朗日插值算法即可得到发射窗口tl时刻的运载火箭飞行轨迹和第j个空间目标之间相对距离的最小值dljmin,设定运载火箭与空间目标之间的交会距离安全阈值为Dsafe,当dljmin>Dsafe时,则表示第j个空间目标与运载火箭没有碰撞风险,当dljmin≤Dsafe时,则表示第j个空间目标对运载火箭的飞行构成碰撞风险。
5)根据步骤(3)至步骤(4)的方法,计算所有m个空间目标与运载火箭之间相对距离最小值dljmin,即j=1,2,…m;当所有m个最小距离dljmin都满足dljmin>Dsafe时,表示发射窗口tl时刻是安全发射时刻,否则表示发射窗口tl时刻是危险发射时刻。
6)根据步骤(2)至步骤(5)的方法,评估所有tl=t0+ Δt时刻的交会情况,其中Δt=l,l= 0,1,2,…L,则可统计得到发射窗口时段[t0,t1] 内的安全发射时段和危险发射时段。
2.2 评估方法二
1)在给定的发射窗口时段[ts,te] 内,针对某一发射时刻t0,已知运载火箭飞行时间长度为T,其在WGS84 坐标系下第i秒的空间位置为[x0i y0i z0i] ,其中i= 1,2,…,T,由此可估算运载火箭每一秒距地面的高度hi=,记火箭最大飞行高度为hmax= max(hi)。
2)已知所有m个空间目标的TLE 根数,设定运载火箭与空间目标之间的最小距离安全阈值为Dsafe,针对第j个空间目标(j= 1,2,…,m),则根据每条TLE 根数可直接计算空间目标的近地点
3)t0时刻:对于步骤(2)中与运载火箭有碰撞风险的空间目标,基于SGP4/SDP4 模型,计算其在t0时刻WGS84 坐标系中的空间位置为[xj1yj1zj1] ,则t0时刻空间目标与运载火箭之间的相对距离为式(2)。
计算运载火箭和空间目标交会所需要的特征时间Δtj1=(dj0-Dsafe)/22.4,若Δtj1>T,则表示该空间目标与运载火箭之间没有碰撞风险,计算结束,否则进入下一步。
4)t0+ Δtj1时刻:令tj1=t0+ Δtj1,基于SGP4/SDP4 模型,计算空间目标在tj1时刻WGS84坐标系中的空间位置为[xj2yj2zj2] ,采用拉格朗日插值即可得运载火箭tj1时刻在WGS84 坐标系中的空间位置[x'02y'02z'02] ,则tj1时刻空间目标与运载火箭之间的相对距离为式(3)。
计算运载火箭和空间目标交会所需要的特征时间Δtj2=(dj1-Dsafe)/22.4,若Δtj1+ Δtj2>T,则表示该空间目标与运载火箭之间没有碰撞风险,计算结束;若Δtj1+Δtj2≤T且dj1≤Dsafe时,则表示该空间目标与运载火箭之间存在碰撞风险,该目标即为危险目标,计算结束;若Δtj1+Δtj2≤T且dj1>Dsafe时,则进入下一步。


6)按照步骤(2)至步骤(5)的方法,评估所有m个空间目标中是否存在危险目标。若所有m个空间目标中没有危险目标,则表示发射窗口时刻t0是安全发射时刻,否则表示发射窗口时刻t0是危险发射时刻。评估所有tl=t0+ Δt时刻的交会情况,其中Δt=0,1,2,…,l(l=t1-t0),则可统计得到发射窗口时段[ts,te] 内的安全发射时段和危险发射时段。
3 仿真分析
3.1 针对评估方法一的仿真分析
设定2020 年12 月26 日某一运载火箭从某发射场发射,火箭飞行最大高度为660 km,飞行时长为607 s,发射窗口为北京时间12 时至12 时10 分,预设运载火箭与空间目标之间的交会距离安全阈值为20 km,空间目标编目数据选用2020年12 月26 日美国SPACE-TRACK 网站公布的TLE 根数,共计20 578 个,运载火箭的飞行高度随时间的变化如图1 所示。

图1 运载火箭仿真飞行高度曲线Fig.1 Simulated flight altitude curve of launch vehicle
选用的计算机配置为:Inter i5 CPU @3.7 GHz,4.0 G 内存,Windows7 64 位操作系统。在此条件下,计算结果如表1 和表2 所示,完成计算所需的时间为10 min18 s,耗时远小于1 h 的时间要求。从表1 和表2 可以看出,使用评估方法一,对于一个10 min 时长的发射窗口,采用1 s 的窗口间隔步长,运载火箭发射前开展与20 000 余个空间目标之间的交会评估分析,仅需10 min18 s 即可筛选出满足给定条件的安全发射窗口时段,同时交会距离计算精度达到米量级。这说明,采用该方法的计算结果能够同时满足高时效性和高精度的要求。

表1 碰撞评估安全发射窗口时段Table 1 Safety launch window period by collision assessment

表2 运载火箭与空间目标具体交会情况Table 2 Specific rendezvous of launch vehicle and space target
3.2 针对评估方法二的仿真分析
采用上述火箭仿真飞行弹道及TLE 根数,针对2020 年12 月26 日15 时11 分10 秒的发射时刻,预设运载火箭与空间目标之间的交会距离安全阈值为30 km,采用评估方法二,评估结果表明该零发射窗口时刻是危险发射时刻,在该发射时刻内,仅有编号为44640 的目标与运载火箭之间存在碰撞风险,具体计算结果如表3 所示。
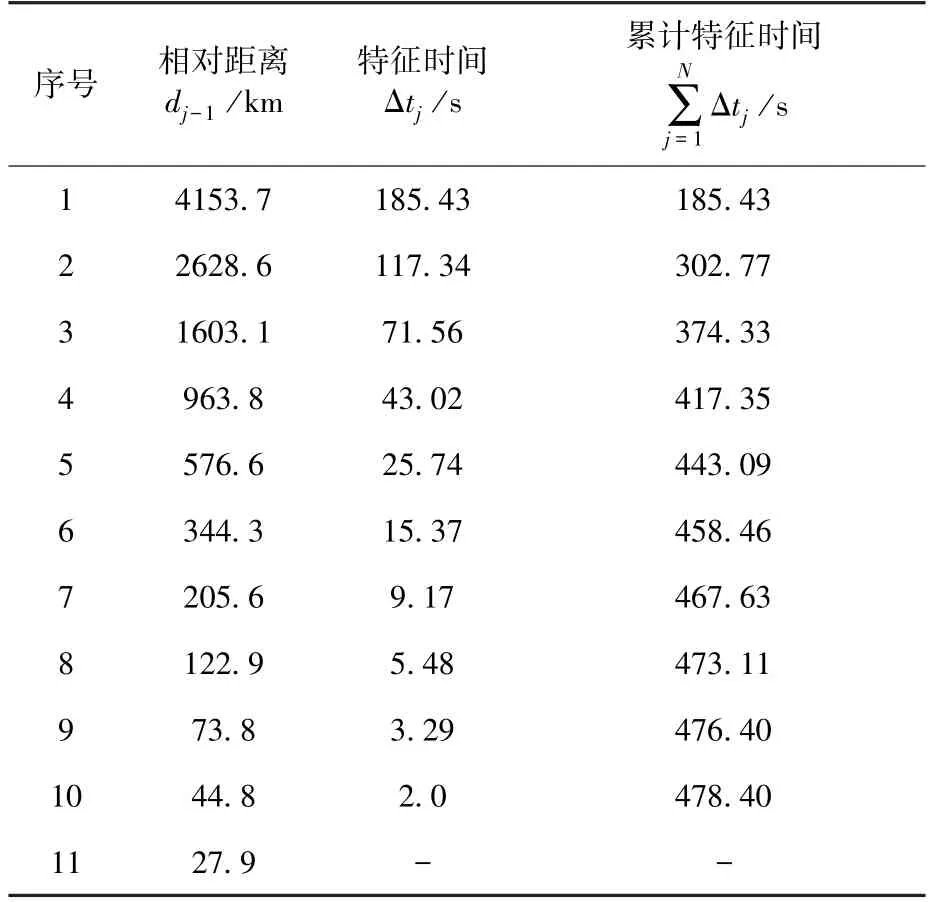
表3 目标44640 与运载火箭之间的相对距离情况Table 3 Relative distance between object 44640 and launch vehicle
在相同的计算条件下,完成上述某一窗口对应的运载火箭与20 578 个空间目标之间的碰撞评估所需时间为8.26 s,满足准实时性的高时效要求。从表3 可以看出,经过10 次迭代计算后,运载火箭飞行的累积特征时间为478.40 s,小于火箭总飞行时长,但此时其与空间目标44 640 之间的相对距离为27.9 km,已小于给定的距离安全距离30 km,因此判定其与运载火箭之间存在碰撞风险,则最终评估该发射时刻是危险发射时刻。这说明采用评估方法二,能够准实时评估某一发射时刻是否满足碰撞安全性,识别出危险发射窗口。
3.3 2 种评估方法的计算效率比较
通过前文可知,针对不同窗口长度的发射任务,2 种评估方法的计算耗时是不同的。为了分析2 种评估方法对不同窗口长度任务的适应性,选择同一火箭飞行弹道,相同的空间目标数量,针对不同的窗口长度(按照1 s 的步长开展计算),统计了在不同情况下的计算耗时,如图2所示。

图2 2 种碰撞评估方法计算耗时比较Fig.2 Comparison of calculation time between two collision assessment methods
通过比较分析可知,2 种评估方法计算耗时都随发射窗口长度的增加线性增加,按照1 s 的步长开展计算;当发射窗口长度小于100 s 时,评估方法二的计算效率更优;当发射窗口长度大于100 s 时,评估方法一的计算效率更优,在工程实践应用中可以根据具体的任务进行选择。
4 结论
针对不同长度的运载火箭发射窗口碰撞评估需求,本文提出了 2 种碰撞评估方法。方法一主要采用等间隔步进窗口的策略,优化空间目标预报轨道选取方法,大幅提高了长时段发射窗口碰撞评估的计算效率。方法二根据火箭理论飞行高度和空间目标近地点高度,在初筛空间目标的基础上,提出了基于变步长外推轨道筛选危险目标的策略,极大程度地缩短了短时段发射窗口的碰撞评估时间。根据文中计算可知,在相同条件下,上述2 种方法的耗时曲线存在交点,当发射窗口长度小于100 s 时,方法二的计算效率更优,当发射窗口长度大于 100 s 时,方法一的计算效率更优。
在工程实践应用中可以根据具体的任务进行方法选择,有效地解决了运载火箭发射前与空间目标碰撞评估对高时效性和高精度的需求。后续,为了进一步减小发射过程中的碰撞风险,可继续开展火箭飞行过程中的实时碰撞评估分析研究。
