基于机器视觉的车流量统计算法应用
2023-06-25王墨琦
王墨琦

摘要:智能交通系统(Intelligent Traffic System,ITS)是目前公路运输信息化、智能化的主流解决方案,其应用依赖于车流量检测数据的准确度。精准的车流量信息在通过智能交通系统改进车辆通行情况的过程中发挥重要作用。文章针对汽车流量检测情况,提出了基于机器视觉的卡尔曼(Kalman)跟踪检测方法,收集车辆运行中的相关信息,并对数据信息进行归类整理,通过车流量信息特征数据分析,对汽车通行情况进行有效分析,改进原有车流量计算中的错检以及误检问题,从而降低了车流计数的漏检率。
关键词:机器视觉;车流量统计;卡尔曼检测方法;交通状态检测
中图分类号:TP391.4文献标志码:A0引言车流量检测是智能交通系统[1]中重要的研究课题之一,常见的检测方法包括感应线圈、红外线、超声波以及视频检测方法[2]。在解决道路交通拥挤方面,基于机器视觉的检测分析方法与统计算法具有重要的应用价值,经过大量的实例验证,基于机器视觉的交通流量检测和分析能够有效解决车辆通行数据采集问题,并据此统计车辆通行中的相关信息,包括车牌、车流量、车辆速度等,并在实践中较好地发挥了智能交通系统的作用。本文针对车辆通行情况构建了相应的检测分析算法,该算法可以准确地对车辆目标进行跟踪、定位与分析,在车流量统计方面具有显著的应用效果。
1车辆通行及跟踪相关问题分析在能见度较低的情况下对车流量统计时,若采用传统的视频分析方式难度较大,在检测分析过程中容易出现算法精度低、检测稳定性差、车辆信息统计不准确等现象。因此,为了准确检测车辆运行信息,本文基于机器视觉技术构建了相应的检测分析方法,跟踪统计车辆的质心坐标、位置信息、运动区域等,并在监测过程中进行降噪处理,保证各项检测信息的准确性与全面性。
2基于Kalman滤波的车辆跟踪数据采集2.1构建Kalman滤波模型Kalman滤波算法通过不断更新目标的状态来跟踪目标或协助跟踪过程,可有效改善基于外观特征的目标跟踪质量,降低物体边界跟踪误差,缩小候选跟踪区域范圍[3]。当前在对车辆行驶情况的分析中,研究人员广泛应用了Kalman滤波算法,针对车辆运行情况构建了一种视觉跟踪分析方式,对目标车辆的实际运行情况进行分析,在检测运用之后能够缩小汽车的匹配范围,从而在运行中显著地提升检测速度,缩短各项信息的匹配时间。视觉跟踪分析方式的构建包括q维动态系统与r维动态系统的离散动态系统。
用于观测的q维动态系统为:
x+1=Ax+ω(1)
目标观测方程为:
y=Hx+υ(2)
其中,x是系统中的状态向量,y是系统中的测量向量,ω和υ分别为系统噪声和测量噪声,A和H矩阵为系统的状态矩阵和测量矩阵,是系统的参数。
Kalman滤波算法运用过程包括预测阶段与校正阶段两个部分。在预测阶段,Kalman滤波算法分析车辆以及检测系统当前的运行状态,分析系统对车辆信息的收集与判断情况,针对检测的图形信息,构建误差协方差矩阵。在校正阶段,Kalman滤波算法对汽车当前行驶情况进行数据校正,构建Kalman增益矩阵,将收集到的数据代入其中,通过计算之后得出协方差矩阵。
2.2设置运动估计模型参数本文构建卡尔曼系统模型,设定运行参数,包括状态向量X、测量向量Y、系统参数A,针对得出的数据进行目标匹配。得出第k+1帧第m个目标车辆的质心坐标、外接矩阵长、宽,计算外接矩阵面积,得出质心距离公式、矩形面积相似公式、面积相似公式,由此计算第k+1帧上的任何车辆的面积情况,分析该数据之下的汽车通行情况。之后及时对跟踪模型进行更新,分析第k帧检测目标与第k+1帧检测目标匹配之后,记录系统分析中的相关数据,并对数据进行整理与归类总结,保留分析中的特征数值,从而总结出新的车辆信息,及时更新Kalman模型,并保留相关的数据记录。
笔者将第n个检测目标与第k+1帧上的检测目标进行配对,得出其中是否存在匹配目标,若通过数据对比没有得到匹配目标,则显示当时跟踪的车辆已经消失在视频流模型之中,失去了进一步统计的意义,此时将标记目标取消。在车辆信息新目标进入视频流时,则需要建立新的模型进行分析,要求将这些运动特征保留,并结合收集的相关数据构建初始化模型。
3对汽车流量的检测
3.1汽车目标图像特征分析笔者利用计算机技术,提取区域中的方位信息,并构建合理的数据分析方式,将方位信息划分为不同的区域,按照不同的特征进行数据采集与分析。分析方式利用区域的数字特征,结合图像中的几何特征表示目标区域的面积、周长以及外接矩形等[4]。利用数据结构分析存储图像中的相关信息,利用每个元素,用线段编码形式表达数据结构。将扫描的信息汇入数组,通过数据分析得出最终的目标区域。扫描的起始部分为图像首行,一直扫描至该行首项不为0的点为止,分析像素联系为255的段,并标出该部分内容的起点、终点坐标,得出区域几何参数信息,扫描汽车通行过程中的全部数据,并得出各个区域的数据,将图像内容输入之后分析该时段内是否存在连通区域,将目标参数输入其中进行数据信息汇总。
3.2汽车流量检测根据所提取的车辆目标特征数据参数,基于机器视觉中的图像识别技术以及计算机视觉技术检测流量,针对目标汽车运行情况构建三维立体模型,通过内容匹配得出最终的立体信息。结合汽车运动过程中方向以及位置的变化情况,得出运动模型中速度、偏转角度、方向等相关参数信息,由此实现对目标的精准定位及跟踪,得出移动状态下的相关参数。对汽车在真实运动状态以及表现运动状态下的变动情况进行光流场分析,利用图像分析汽车在运动状态下的运动场,包括运动参数以及运动目标。精准追踪汽车运动速度,采用迭代方式进行分析。运用图像差分的检测方法,分析汽车运动图像序列各帧之间的相互关系,并构建针对图像的相关处理方式,将图像序列中每帧与参考帧进行对比。
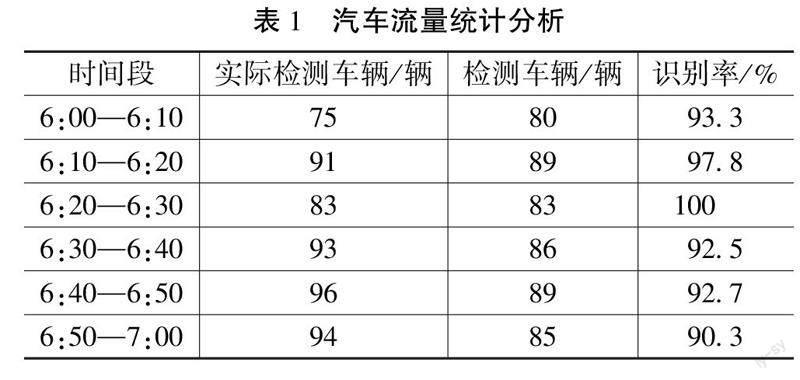
通過对背景的更新与处理,得出汽车运动过程中的目标参数,并对图像进行图像二值化处理[5],得到目标图像与背景图像。对得出的汽车目标图像进行去噪处理,构建33×33的去噪模板,若黑色像素个数Sum小于设定阈值T,则说明该区域中的内容为噪声点,则将像素灰度值从0变为255,并对得到的像素点依次进行处理,从而将运动中的噪声点去除,得出最终的汽车目标图像。通过对收集到的图像特征进行提取与分析,得出汽车流量,分析方法为将灰度变化的图像与背景图形进行差分对比,并设置一个固定的阈值。计算车辆差分图像特征点个数,据此计算车辆面积,并分析此阶段内是否有车辆路过,从而对车流量进行统计分析。结合图像灰度变化设定既定的阈值,测量得出阈值N,设定检测区域内个数或目标面积,设定目标面积S,若目标面积S大于灰度的阈值,则显示该时段内有车辆经过,否则,则认定没有车辆路过。对阈值N进行测试与调整,得出的车流量数据如表1所示。
4交通状态检测汽车实际运行情况是重要的检测内容与要求,可以基于机器视觉,联合运用计算机技术与通信技术进行分析。
提取汽车运行过程中的交通状态,并结合汽车流量的平均特征进行分析,综合判断当前汽车行驶状态为拥挤或者阻塞。例如:在对一个双车道进行分析的过程中,假设1 min内平均通过18辆汽车,则一天之内该车道平均汽车流量阈为18。利用遗传算法优化BP神经网络智能化判断汽车通行情况,构建一个3层BP神经网络分级器,提升计算过程中的BP神经网络学习速度,从而实现对车辆运行情况的精准判断。结合汽车流量变动设置BP神经网络的阈值与权值,选择平均车流量作为输入层节点,将汽车经过区域划分为5个节点,将汽车通行情况作为输出层节点,设置交通阻塞或者交通畅通两个节点。结合经验数值,估算结点个数,BP神经网络训练误差是0.055,在隐含层节点数为10时,能够达到最佳的运行效果。结合BP神经网络实际运行情况分析交通状态,利用遗传算法累计开展8次检验,每次检测结果识别率均超过96%,如表2所示。
阻塞交通状态下BP算法误差0.103,GA优化BP网络误差0.057;畅通交通状态下BP算法误差0.101,GA优化BP网络误差0.048。结果显示,对车辆交通情况的判断正确率均超过96%,可以将其运用于对交通状态的检测过程之中,具有实时性检测的运用效果。
5Kalman算法实现跟踪
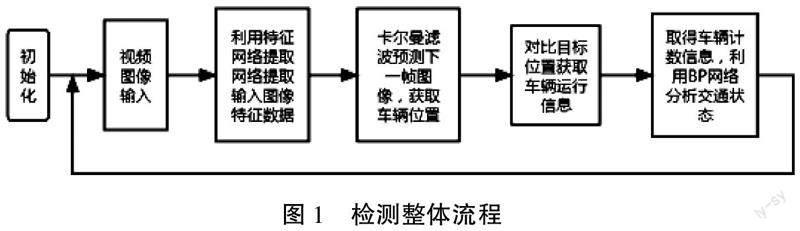
在运用Kalman跟踪算法统计车流量信息时,按照以下流程进行。首先计算车辆信息的特征值,与车辆的运动区域相结合,对图像信息进行预处理,再对图像进行初始化与二值化,进行膨胀腐蚀与开闭运算,由此通过多种方式处理,进行目标定位,选择分析特征,计算面积区域中的跟踪区域特征值以及质心位置,从而得出车辆信息特征值。随后将目标数值代入,构建Kalman模型,对参数进初始化,分析预测车辆下一时刻所处的位置。将收集到的数据值进行匹配,构建相似匹配函数,包括最小外接矩形长与宽、运动车辆质心位置、外接区域面积等,通过计算之后预判车辆的通行情况,并进行迭代跟踪,最终计算得出车流量。基于Kalman算法进行机器视觉检测车流量的整体流程如图1所示。
6结语本文系统地阐释了在基于机器视觉获得的图像中进行车流量检测的方法。检测系统利用Kalman滤波模型,通过对汽车图像的目标特征分析,获取跟踪目标,从而实现车流量检测。在对车流量进行分析过程中,有效地结合汽车面积、质心和最小外接矩形等相关参数,利用图像差分法对汽车流量进行检测,利用数值构建汽车目标图像,并对图像信息进行去噪处理,增强图像信息处理效率,从而精准得出车流量,研究得出检测识别率不低于90%,符合智能交通系统中实时性检测的相关要求。文章基于该车流量检测,利用BP网络分析交通状态,完善和优化了智能交通系统中车流量检测的应用方式,提高了智能交通系统的应用效益。该研究对智能交通系统持续改进和更新具有重要的意义。
参考文献
[1]史新宏,蔡伯根,穆建成.智能交通系统的发展[J].北方交通大学学报,2002(1):29-34.
[2]齐美彬,鲜柯,蒋建国.基于对比度失真参数的车流量统计算法[J].合肥工业大学学报(自然科学版),2010(12):1815-1818,1823.
[3]周云,胡锦楠,赵瑜,等.基于卡尔曼滤波改进压缩感知算法的车辆目标跟踪[J].湖南大学学报(自然科学版),2023(1):11-21.
[4]吕扬建,李光耀.基于视频分析的车流量统计算法研究[J].井冈山大学学报(自然科学版),2013(4):46-51.
[5]韩锟,韩洪飞.基于区域级和像素级特征的路面裂缝检测方法[J].铁道科学与工程学报,2018(5):1178-1186.
[6]尹晓丁,吴阳明,赵喆,等.基于DSP图像处理的车流量统计算法研究[J].计算机与数字工程,2017(6):1204-1206,1233.
(编辑 王雪芬)
Application of vehicle flow detection based on machine visionWang Moqi
(Intelligence and Information Engineering College, Tangshan University, Tangshan 063000, China)Abstract: Intelligent transportation system (ITS) is currently the mainstream solution of road transportation informatization and intelligence, and its application depends on the accuracy of traffic flow detection data. Accurate traffic flow information can play an important role in the intelligent transportation system to improve vehicle traffic. In this paper, a machine vision-based Kalman tracking detection method is proposed for the detection of vehicle flow, which collects relevant information in vehicle operation, classifies and sorts out the data information, effectively analyzes the vehicle traffic situation through the analysis of vehicle flow information characteristics, and improves the error detection and false detection problems in the original traffic flow calculation, thereby reducing the missed detection rate of traffic flow counting.
Key words: machine vision; vehicle flow detection; Kalman detection method; traffic state detection
