基于残疾康复群体的一种上臂辅助机械
2023-06-25张晨宇孟紫雯刘文昊
张晨宇 孟紫雯 刘文昊


摘 要:目前我国的残障数占总人口的6.34%,其中大部分患者有残疾康复的需求。针对社会需求,设计了一款针对上肢残疾患者使用的家用康复产品。设计的上臂康复机械是一个帮助患者康复的穿戴设备,患者将其穿戴在手臂上时,手臂固定处的传感器会感应患者施加的力并通过电动机带动机械使手臂弯曲,或通过蓝牙连接机械进行远程操控,协助患者做出相应动作,达到锻炼手臂的目的。
关键词:康复;辅助机械;上臂;残疾
中图分类号:TP212 文献标识码:A 文章编号:2096-4706(2023)07-0154-04
Abstract: At present, the number of disabilities in China accounts for 6.34% of the total population, most of whom have the need of disability rehabilitation. According to the social needs, a household rehabilitation product is designed for patients with upper limb disabilities. The upper arm rehabilitation machinery is a wearable device to help patients for rehabilitation. When the patient wears it on the arm, the arm fixed sensor will sense the force of patient and drive the machinery to bend arm through the electric motor, or connect machinery through bluetooth to conduct remote control, so as to assist patients to make corresponding action and achieve the purpose of exercising the arm.
Keywords: rehabilitation; auxiliary machinery; upper arm; disability
0 引 言
我國的残障数达到了8500万人,成为了世界上残疾人口最多的大国,残疾人成为了社会,国家,以及每个家庭都需要关注的群体。在残疾人群体之中,肢体残疾群体占比最大,约为30%[1]。我们团队基于这样一个大背景下,研究了此产品。我们的产品主要关注点在术后康复的患者人群。此类人群将通过我们产品的辅助,达到有效的康复[2,3]。
1 产品介绍
本产品是一个集传感器、无线传输技术、自动化控制技术、物联网下智能化控制等为一体的助老助残康复机械。它的主要研究内容如下:
1)机构主体以6061-T6为主要材料,并根据大量考察和数据研究设计出符合人体工程学的机构。创新的以类似于伞骨的连杆机构实现了大臂带动小臂的角度变化。
2)控制系统:采用压力传感器和远程控制共同作用,当传感器感受到使用者所施加的微小的力后就会将信息传输给开发板,同时开发板将信号传输给电机驱动机构运转带动小臂运动。同时使用者还可以通过手机蓝牙连接机械远程操控电机转动速度的快慢,以达到辅助使用者弯曲手臂或施加反力达到锻炼手臂的目的。
3)物联网与手机APP设计,使用者使用手机APP可以接收到通过传感器接收到的患者施加的力,可以使使用者直观的看到自己的康复状态。APP还可以给予使用者需要的提示和帮助。
4)产品外观设计,产品外观设计需符合大众审美并能适用于不同年龄段的人群。
2 机构分析与工作原理
如图1所示,上臂辅助康复机械以步进电机为动力原件带动丝杠旋转,由于丝杠是固定在板一与板二之间,同时板一与板二刚性连接在下板上。在步进电机启动后,马达连接刀架作轴向回转动作,并且刀架旋转丝杠螺母座作垂直运动,此时螺母座拉动连杆5与连杆1,连杆5与关节1组成二杆机构,并拉动关节1绕下板固定轴心旋转;同时丝杆螺母座拉动连杆1,连杆1拉动由关节1,连杆2,连杆41及连杆42组成的四杆机构,且在与连杆5拉动关节1的配合下,使关节1相对小臂做旋转运动,同时将老人大臂与下板固定,小臂与小臂板固定,实现辅助伸缩手臂的目的。
3 控制系统
本产品采用了Arduino数字单片机系统。Arduino是一个非常简单易上手的开源电子设备原型平台。它可以和多种常见的电子元件相连,如各类感应器、伺服电机、手舵机,或者任何输入/输出装置[4]。Arduino控制器能够同时使用三个不同位置的独立的传感器接口来连续接收处理各种环境数据,而在接收器位置上独立的微控制器接口能够首先使用基于Arduino语言的程序设计语句来快速完成程式码的编制,继而完成翻译数据并自动导出到二进制数据,再自动烧录输出到微控制器。对嵌入式Arduino系统的程序设计通常也是直接使用Arduino的程序设计语句(基于Wiring)和Arduino设计条件(根据Processing)来完成的。基于Arduino技术的开源项目,可能是仅只包括了Arduino,也很可能仅仅包括了Arduino和另外的几个能够同时在一台PC主机上工作运行的开源应用软件,透过它们相互之间进行交流(例如Flash,Processing,MaxMSP)来达成。本产品采用了Arduino家族中的Arduino UNO单片机,处理器核心为ATmega328[5],同时拥有十四路IO口及十六MHz的晶体振荡器、usb口、供电插口、ICSP-header、复位按键等各一[4]。本设计中,由Arduino单片机负责处理各种传感器信息,并利用伺服电机驱动模块传递脉冲信号以完成电动机的转速调节,控制系统简图如图2所示。
4 主要模块介绍
4.1 传感器控制模块
感应器主要由关节压力传感器和手腕压力传感器组成。一个气压传感器读取手臂固定部分的实际气压,从角度传感器的欧拉角输出确定手腕的扭转角度,并将数据发送到arduino微控制器以调整电机的速度[4],机构随着手臂的转动而转动。
4.2 数据传输模块
数据传输模块采用blinker。Blinker提供包括了对当前可用网络的一些最普遍常见的网络接入和解决方案的全面支持,如蓝牙,Wi-Fi,NBiot/GPRS,并且还可以同时适应目前大多数的物联网应用站点的要求。蓝牙模块连接单片机后,将字节数据发送给上位机连接到arduino单片机上的功能,实现单片机远程遥控调速等功能实现;同时,Arduino单片机还可以将电机控制、传感器力等信息回传给用户客户端,并转化为有用的信息。远程控制调速系统不仅是可以大幅度减少由于自动控制调压系统带来的人工操作失误[6],还为用户带来必要的信息,反馈给用户有价值的信息,从而增加了设备的智能性和安全性。
4.3 电机驱动模块
考虑到在手臂关节处驱动小臂所需的扭矩比较大,而这台机器是用于助老或康复医疗设备,但还没有建立精确的机构运动学机构模型,所以下一步将对整个装置进行系统的仿真实验,建立详细的运动学模型,然后选择合适的电机驱动。
5 总体尺寸设计
由于它的穿着方便和结构精巧,团队发现以下尺寸最适合人体舒适度 经过研究。本产品总长度为500 mm,最大宽度为60 mm,最大高度为123 mm。
5.1 小臂外形尺寸
外形尺寸为了使小臂能够抬起的装置,固定小臂的机构应该适应大多数老年人小臂的长度。不能超过手腕,也不能短到肘部,所以小臂板的总长度为175 mm,考虑到省力等因素,小臂板的宽度为30 mm,厚度为10 mm,以舒适性和美观度为基础。
5.2 大臂外形尺寸
大臂的机构为吊臂的运动提供动力,根据我们的调查和美观度的实际情况,我们将大臂的总体尺寸设定为200 mm。
5.3 关节处外形设计尺寸
本发明考虑到肘部弯曲时刚性结构弹性小等特点,采用类似伞骨的连杆机构,可以达到大小臂联动的目的,增加了大臂和小臂弯曲时的稳定性和弯曲时机构的总长度。机构在接缝处平放时总长。
6 材料强度校验
本设计采用用6061-T6进行制作。6061-T6高强度、硬度大(HB可达90度以上),具备良好的机械加工性能,且抗氧化能力较好。无沙眼吻突,表面平整度也较高。提高了产品品质,降低了原材料生产成本。这同时也是中低价值,高品质建筑材料的最好选用。6061-T6系统主要是铝、镁、硅等合金,属于一次热加工型的抗锈蚀型合金。强度与耐腐蚀性能较弱,但均匀性能皆良好。
6.1 板抗弯强度校核
板件许用应力σ=205 Mpa,图3~图5分别为均布载荷分布图、剪力沿轴线的变化规律图以及弯矩沿轴线的变化规律图。
d1=150 mm,d2=60 mm
b,h分别表示板件的长和宽,对应d1与d2;Iz表示截面对中心轴的惯性矩;Mmax表示最大弯矩;q表示均布载荷;σmax表示最大许用应力;Ymax表示梁截面上下边缘到中心轴的距离。
6.2 螺栓的强度校核
应用M5螺栓,螺栓性能等级为5.6。
其中,σs表示屈服极限,s,sn表示安全系数,τs表示剪切屈服极限。
7 竞争力分析与产品前景
7.1 競争优势
7.1.1 精巧的产品结构
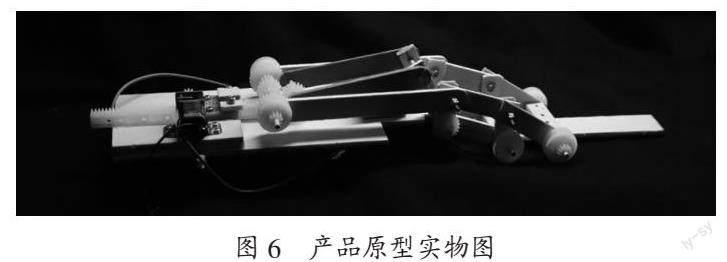
我们团队开创性的设计将导轨丝杠和类似伞骨结构的连杆组织精密的结合起来,导轨丝杠的磨擦损失较低,传动控制系统有效率,准确度高,轴向硬度好,同时具有高传动扭转性的优点与连杆组织的设计相对简便,承载能力大,适宜康复运动这种中低速的运动的特性巧妙地融合在一起,避免了冗余的机械结构对控制驱动系统的高要求以及其产生的多余的重量对使用者产生的不适,产品原型实物图如图6所示。
7.1.2 创新的材料选择
此产品采用6061-T6材料,这种材质的主要合金元素是铝和硅,高强度,高硬度,具有优秀的耐蚀、可焊性,抗氧化功能较好。优秀的焊缝特点,氧化功能好。无砂眼吻突,平整度较好[7]。这同时也是所有低价值,高质量材料中的最好选择。产品广泛应用于家具及机械零件,精密制造,模具等行业。但考虑到康复过程是个比较长期的工程,对机器的消耗也不能减少,因此更换零部件比较不现实,所以抗磨损,高强度高硬度的6061-T6就是一种不二选择。
7.2 产品前景
中国残疾死亡原因以后天获得性伤残为居多,非传染病致残也占有较大比例,先天性伤残则不足百分之十,而且存在着较大的区域、城乡和性别差异;各个年龄阶段的存在不同的死亡危险,非感染性疾病死亡和创伤及伤害死亡的可能性随着年龄增加逐渐上升。
传统医疗手法分为活动恢复、作业恢复、心灵理疗、牵拉、言语、中医等疗法手法,现代医疗仪器则主要分为光、电、音、电、热、冷、机械和物理因子综合疗法的仪器,另外还有站立床、吊床、单双杠教学、拉力器、大功率车等简易的动作恢复练习仪器和运动精神心理练习仪器,科技浓度都很低。但近年来,随着科技发展水平的日益提升,系统的动作恢复练习医疗手法也在进一步提升,医疗功能日益增强。因此,在电刺激疗法中,产生了多波形和调制技术、功能性电激发技术、双侧控制镜像式电激发技术、新型人体工程学技术和无菌化的耗材技术、大数据分析和人工智能技术、人工智能辅助评价和药物推荐等多项创新技术,有效增强了电激发技术的医疗作用。在电生理学中,近年来还利用了机器人视野、虚拟现实等新技术进行了三维空间的虚拟现实练习,提高了病人的沉浸性。
随着现代科学技术的持续发展和提高,多种新兴健康医疗技术也逐步得到了开发和商业化使用,其中最具标志性意义的便是经颅磁刺激技术、健康机器人技术,以及人工智能技术在健康医学中的广泛应用。由于经颅磁刺激技术拥有高强度、高穿透力、无侵入感、无痛冲击等优点,并作为防治精神疾病和神经病变的一项重要核心技术,2008年美国FDA首次允许了经电磁刺激技术进行对抑郁的诊断。近年来,由于经电磁深度和对焦、导航定向等新兴技术的广泛应用,经颅磁刺激技术对抑郁、帕金森病等精神疾患的诊治有效性也日益增强。影像辅助的导航与定位系统、刺激线圈的机械臂主动追踪等,创新科技的运用可以增强医生对脑部靶点治疗位置的精确度,进而改善临床效果。
8 结 论
以上开发介绍的一种上臂康复辅助装置,适用范围受限以及使用时装置调整较为繁琐等问题都得到了解决。该康复器械在传感器上使用了压力角度传感器共同采集数据,在控制上采用远程和感应控制,与市面上现存康复器械相比获取信息更为准确且智能化程度更高。
参考文献:
[1] 陈三军,陈功,郑晓瑛.中国残疾人口调查与数据 [J].国际生殖健康/计划生育杂志,2011,30(3):216-217.
[2] 崔斌,陈功,郑晓瑛.中国残疾人口致残原因分析 [J].人口与发展,2009,15(5):51-56.
[3] 石松隆和,姜楠,高岛亮,等.上肢残疾者的助力辅助装置 [J].机械设计与研究,2009,25(1):38-39.
[4] 劉恒,宋爱平,陈俊宇,等.基于Arduino的穿戴式外骨骼助力装置设计 [J].工业控制计算机,2020,33(8):137-139.
[5] 马列,刘阳,董志鹏,等.基于Arduino的太阳能电池板最大光功率跟踪系统 [J].沈阳工程学院学报:自然科学版,2019,15(1):68-72.
[6] 何炳蔚,张月,邓震,等.医疗机器人与医工融合技术研究进展 [J].福州大学学报:自然科学版,2021,49(5):681-690.
[7] 周培东,曹珍珠,武鑫鑫,等.浅谈铝合金材料在附着式升降脚手架中的应用 [J].建筑机械化,2021,42(10):72-75.
作者简介:张晨宇(2003—),男,汉族,湖南常德人,本科在读,研究方向:机械设计制造及其自动化。
