基于EtherCAT环网的MMC故障检测与容错控制
2023-06-25许文杰张江娜梅志敏
许文杰 张江娜 梅志敏


摘 要:模块化多电平换流器(MMC)拓扑是目前高压、大容量电力电子装置的主要配置方案,但因其子模块数量较多且易发生故障,从而严重影响系统的稳定性和可靠性。文章通过将EtherCAT工业以太网技术引入到MMC控制系统,提出一种基于EtherCAT环网拓扑的MMC子模块分布式控制系统构架,它采用分布时钟的EtherCAT环网通信实现子模块控制单元的精确同步。针对子模块IGBT开路故障,优化后的时序逻辑可完成子模块故障信息反馈并大幅度缩短子模块故障切除时间,通过对通信链路设置故障冗余,子模块同步驱动信号和故障反馈信息得以稳定传输。最后,搭建了MMC仿真和實验平台,实验结果验证了EtherCAT环网控制MMC系统在子模块故障检测和容错控制的有效性与可行性。
关键词:模块化多电平换流器;EtherCAT环网;分布式控制;故障冗余;容错控制
中图分类号:TM464 文献标识码:A 文章编号:2096-4706(2023)08-0051-05
Abstract: Modular Multi-Level Converter (MMC) topology is the main scheme of high voltage and large capacity power electronic devices, however, the sub-modules are many and easy to fail, which seriously affects the stability and reliability of the system. Through introducing EtherCAT industrial Ethernet technology into MMC control system, this paper proposes a MMC sub-module distributed control system architecture based on EtherCAT ring network topology. The precise synchronization of sub-module control units can be realized by using distributed clock EtherCAT ring network communication. Aiming at IGBT open-circuit fault of sub-module, the optimized sequential logic can complete the fault information feedback of sub-module and greatly shorten the fault removal time of sub-module. By setting fault redundancy for communication link, the synchronous driving signal and fault feedback information of sub-module can be transmitted stably. Finally, the simulation and experimental platform of MMC is built, and the experimental results verify the effectiveness and feasibility of EtherCAT ring network control MMC system in sub-module fault detection and fault-tolerant control.
Keywords: Modular Multi-Level Converter; EtherCAT ring network; distributed control; fault redundancy; fault-tolerant control
0 引 言
当模块化多电平换流器MMC(Modular Multilevel Converter)向更高电压等级扩展时,子模块数量达到成百甚至上千,控制系统结构复杂,需要实时采集的数据量较大,子模块发生故障概率较高[1]。传统CAN现场总线、RS485等通信方式的网络节点数与数据段最大长度有限,且通信速率受传输距离的
影响较大,难以满足多个控制器之间协调运行以及高速通信的要求。针对上述问题,已有一些学者开展了相关研究,其中大部分采用光纤作为数据传输的介质,通过制定简单可行的通信协议来提高节点同步精度[2],或是结合合理的时序逻辑关系与软件算法来实现系统控制器的配合,完成子模块故障的可靠监测。
随着信息技术的不断发展,工业以太网已进入全球工控自动化的标准通信技术之列,其中以太网控制自动化技术(EtherCAT)因其高速和高数据效率、支持多种物理拓扑结构等优点[3],在我国也被逐渐应用于伺服驱动、机器人等研究中[4]。相比于传统通信模式,EtherCAT采用“集总帧”的思想,将多个EtherCAT子报文集合在一个数据帧中,可以在一个EtherCAT网段内挂载65 535个从站设备共同组成高性能的分散式I/O系统,并且EtherCAT提供的分布时钟机制,可以使所有EtherCAT设备使用相同的系统时间,从而控制各设备任务的同步执行[5]。
基于EtherCAT突出的实时性、灵活性以及同步性等优势,本文将EtherCAT引入到MMC控制系统,利用EtherCAT分布时钟对各子模块进行协调控制,并通过设计合理的时序逻辑关系,完成子模块故障信息的反馈以及冗余子模块的投切,缩短故障处理时间,同时对EtherCAT通信链路设置了故障冗余,以提高系统可靠性。最后,通过实验验证了该方案的合理性和可行性。
1 MMC拓扑与工作原理
三相MMC拓扑结构以及半桥子模块结构如图1所示,其中MMC由6个桥臂构成,每个桥臂包含若干个级联的子模块(SM1至SMN)和一个桥臂电抗器Larm,上、下桥臂合成为一个相单元。每个半桥子模块中包含1个悬浮电容C0,2个IGBT(T1、T2),且每个IGBT反并联一个二极管(D1、D2),USM为子模块的输出电压,Uc为悬浮电容的电压,iarm为流过子模块的桥臂电流。通过控制开关管T1与T2在导通、关断两种状态之间不断切换,可实现子模块的不同工作状态[6]。
由MMC结构可知,相较于传统逆变器,其子模块内包含了大量储能元件,在实际运行过程中需要监控的实时数据、控制目标数量众多[7],随着MMC向更高电压等级扩展,多级控制单元协调控制难度逐渐增大,同时系统对通信速率的要求也相应提高。
2 控制系统及其时序逻辑
2.1 控制系统架构
为实现子模块控制器与上层控制器间可靠、高速、大容量的数据交互,实时检测子模块状态,保证系统稳定运行,本文在MMC控制系统中引入EtherCAT协议,其中通信网络如图2所示,是由一系列工作节点通过双绞线以首尾相接方式构成的闭合环路。相比于点对点连接方式构成的星型拓扑,环型拓扑可以大幅度减少通信主节点的接口数量。
在引入EtherCAT后,整个MMC的控制系统架构如图3所示,其中控制系统作为整个硬件结构的大脑,主要包括主站控制器和从站控制器。
在该控制系统中,主站通过EtherCAT环型网络与各个从站通信,主站是整个MMC系统的运算及控制核心。每个子模块对应一个EtherCAT从站,从站采用EtherCAT专用协议解码芯片ESC(EtherCAT Slave Controller)与微处理器DSP,根据主站发送的调制波结合环流抑制等策略进行子模块调制控制,并同时采集子模块故障信息上传到主站,从站组成如图4所示。
2.2 控制系统时序逻辑
MMC需要子模块间协同工作,由于各个控制模块功能不同,因而所选芯片也不尽相同,各个控制单元分别工作在各自的时钟下,其晶振或电路参数之间的差异会导致子模块驱动不同步。本文采用EtherCAT分布时钟来保证各从站控制器间的同步。
分布时钟机制使所有从站时钟都同步于一个参考时钟,与主站连接的第一个具有分布时钟功能的从站时钟即为参考时钟。设定每个从站时钟的时间控制环在数据帧的SOF(Start of Frame)到达时锁存本地时钟时刻tlocal(n),主站首先通过发送数据报文测得各从站传输延时tdelay(n)和时钟初始偏移量toffset(n),然后从参考时钟从站读取其当前系统时间tsys_ref,并写入各从站时钟[7],之后从站通过公式计算得到本地时钟漂移量?t:
?t=tlocal(n)-toffset(n)-tdelay(n)-tsys_ref
ESC控制本地时钟时间的规律为每10 ns增加10个单位,当?t>0时,则每10 ns增加9个单位,当?t<0时,则每10 ns增加11个单位,以实现时钟漂移补偿。在经过补偿之后,从站将计算出它的本地系统时间副本,这个时间用来产生同步信号Sync0标记,供从站DSP使用。
Sync0信号通常情况下为高电平,并周期性产生一段低电平信号,当Sync0信号由高电平变为低电平时,会产生一个中断事件。时钟同步示意图如图5所示。
在本控制系统中,主站向各从站发送调制波信号,各从站DSP经由ESC数据交换后在Sync0中断事件中读取调制波,并与载波信号相比较产生各个子模块的驱动信号,以此保证各个子模块投切一致。主从站时序逻辑如图6所示。
3 故障检测与容错方法
MMC中子模塊较多,运行过程中可能会发生故障,引发输出畸变、环流增大、直流侧电压和电流振荡等问题。子模块常见故障类型可以分为2类:子模块内部故障以及驱动故障。
3.1 子模块开路故障检测
在实际工程中MMC包含IGBT数量相对较多,因而更易因散热、冲击电压、冲击电流等原因发生故障,系统一般会配备“热备用”状态下的冗余子模块来确保系统无间断运行[8]。IGBT故障可分为开路故障和短路故障两种类型,短路故障破坏性较大,因此子模块本地控制器一般会配备短路保护。开路故障会造成电压、电流波形畸变等严重后果,影响系统正常运行,因此本文重点分析开路故障的情况。根据图1,子模块发生开路故障时输出电压特性分析如下:
当iarm<0,且T1开通、T2关断时,若T1发生开路故障,则原悬浮电容放电回路被阻断,Uc会持续增加,无法稳定在额定电容电压附近,故障子模块所在桥臂的桥臂电压増大。
当iarm>0,且T1关断、T2开通时,若T2发生开路故障,则对应的子模块由切除状态变为投入状态,悬浮电容异常充电,Uc总体会呈上升趋势,故障子模块所在桥臂的桥臂电压增大。
经整理可得子模块IGBT开路故障对子模块输出电压USM影响分析如表1所示。
上述分析说明,当子模块IGBT发生开路故障时会导致子模块电容电压超出正常范围,因此可通过对子模块悬浮电容安装电压传感器来实时检测每个子模块电容电压值,当其超出设定检测阈值,则可认为该子模块发生了IGBT开路故障[9,10]。
由于每个子模块采用单独的控制器,因此当子模块发生故障后,从站控制器需要将故障信息上传至主站,主站经控制运算后完成故障子模块的切除与冗余子模块的投入。对于一个闭环系统来说,理论上如果采样值能够立刻用于控制运算,则生成的数据就避免了信号由采样到上传给主站进行数据处理并最终下发给各桥臂子模块所产生的延迟时间,但是由于硬件原因无法实现,因此应当首先考虑减小采样延迟,实现故障的快速切除,其次在将故障子模块驱动信号发送给冗余子模块的同时,还需要保证冗余子模块与其他正常运行子模块动作同步。
本文采用两个PLC控制周期来完成子模块故障信号采样上传以及控制指令下发,并将Sync0周期设置为子模块载波周期,以确保每个载波周期子模块间的驱动信号至少同步一次。考虑到为了使得冗余子模块投入后能够尽快和其他子模块同步,PLC控制周期为Sync0周期的一半。系统的采样时序图如图7所示。
3.2 子模块开路故障检测
MMC系统中常见故障除电力电子器件故障外,还包括子模块驱动故障。当系统通信网络出现网口故障以及链路故障时则会导致子模块驱动信号丢失,影响子模块正常投切。为避免系统正常运行时数据帧传输受到影响,本文在上述控制系统基础上实现通信链路冗余,提高以太网系统可靠性和可维护性。
由于采用环型拓扑组网方式,系统中第一个从站与最后一个从站均与主站相连接,因此本文主站采用双网口,且每个网口均具备发送和接收以太网帧的功能。根据故障情况,图8中列出了冗余系统正常工作和出现单点故障时的帧传播策略:
如图8,正常情况时,发送帧由M网口发送,经过从站节点的遍历,经N网口接收,进入数据帧接收队列;出现链路故障时,发送帧由M网口发送,遍历至故障点处环回,经M网口接收,交由N网口发送,从另一个方向遍历至故障点处环回,经N网口接收,进入数据帧接收队列。
在链路冗余实现过程中,从站主要通过ESC实时检测两个网口PHY(Physical Layer)的数据连接信号LINK_MII(0)、LINK_MII(1)以及数据有效信号RX_DV(0)、RX_DV(1)来判断当前所在链路状态,因为在数据传输过程中,RX_DV信号只在数据有效时拉高。当无有效数据时,ESC将该链路端口状态写入对应寄存器,并通过全双工链路将下行报文转为上行报文送回主站,主站读取各从站子报文工作计数器(Working Counter,WKC)以及数据链路状态寄存器判断子报文是否被正确处理,并将未处理的子报文交由另一以太网口发送至对应从站处理,从而实现系统在链路故障情况下的正常运行。
4 实验与验证
本文首先以MMC的A相上桥臂第一个子模块在t为1 s时发生IGBT开路故障为例,搭建Simulink模型进行仿真分析,仿真结果如图9所示,可以看出在1 s之后,故障子模块电容电压迅速上升,而正常子模块电容电压经过约0.05 s后基本稳定在1.4 kV。通过与正常工况对比,故障工况下该子模块减少了一个放电阶段,故电容电压会持续上升,而随着子模块电容电压的波动,输出相电压、直流母线电流、环流等也会产生相应波动。
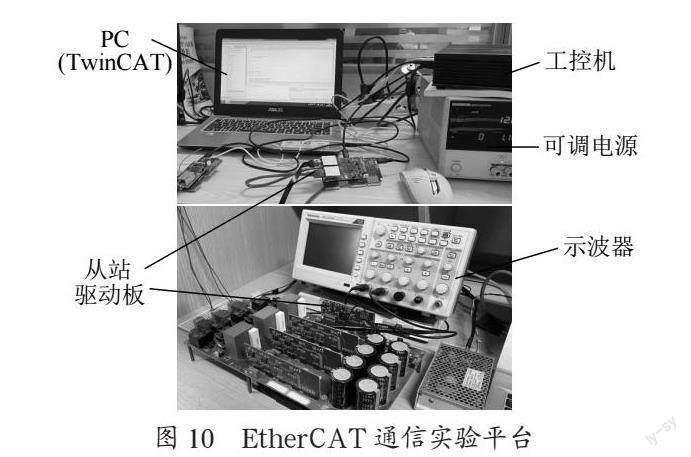
为了验证上述提出的基于EtherCAT环网拓扑的MMC子模块开路故障检测方法的可行性以及对链路冗余问题的解决,本文搭建了如图10所示的相应实验平台。
主站采用工控机,基于TwinCAT 3软件实现对各从站的控制,TwinCAT 3软件将模块化思想以及其灵活的软件架构融入到整个控制平台中,几乎每一种控制应用程序都能在TwinCAT 3中实现。从站控制器ESC选用德国倍福公司研发的芯片ET1100,微处理器选用DSP芯片TMS320F28379。
当主站向各从站发送数据帧,从站间同步精度如图11所示,由右图可知两从站间延时约为25 ns,从站同步精度较高。
设定子模块载波频率为1 kHz,根据上节分析,Sync0周期为1 ms,PLC控制周期为500 μs。当子模块电压超过额定电压的120%时,认为子模块存在过电压[11]。假设某一时刻子模块电容电压超出设定阈值,可得到如下波形如图12所示。
由图12可知,從故障发生(红色故障标志位由1变为0)到冗余子模块投入使用(蓝色标志位由1变为0),整个故障处理所需时间约为0.7 ms。
当使任意两从站间通信线缆断开,可得到以下TwinCAT 3 Scope所示波形,根据图13可知,在设置了链路冗余后,当系统通信链路出现故障,主站与两从站间仍然能够保持正常数据传输。
根据以上实验结果可知,本文方法能够保证MMC控制系统中各控制单元同步,并且能够快速有效地检测子模块开路故障,实现子模块驱动信号的稳定传输。
5 结 论
本文首先针对模块化多电平变流器系统存在的问题,设计了基于EtherCAT环网拓扑的MMC控制系统方案,该控制系统在多级控制器协同控制方面采用EtherCAT分布时钟进行分级同步,有效地避免了不同控制单元由于自身晶振的差异所引起的不同步。另外本文在上述控制系统基础上提出了一种子模块故障检测方法,该方法不仅具备子模块开路故障检测能力,还能够避免系统通信故障,防止子模块驱动信号丢失引起输出电压、电流畸变。最后本文搭建了相应实验平台,实验结果证明了本文方法的有效性与可行性。相比传统测量方法,本文方法在缩减系统硬件配置的同时也降低了子模块开路故障检测时间,能够保证系统可靠稳定运行。
参考文献:
[1] 张正发,李可军,王卓迪,等.兼具开路故障诊断能力的MMC电容电压测量方法 [J].电力系统自动化,2017,41(7):114-119+167.
[2] 李智福.风电场风力发电机的运行维护分析 [J].集成电路应用,2022,39(4):300-301.
[3] 蒋应伟,侯凯,陈永华,等.EtherCAT总线技术在现代电力电子装置中的应用 [J].中国电力,2016,49(9):66-71+77.
[4] 郑国良,张德炜,武艺泳,等.某高超声速风洞攻角机构控制系统 [J].兵工自动化,2020,39(8):44-48.
[5] 朱良合,袁志昌,盛超,等.基于柔性直流输电的异步互联系统频率支援控制方法综述 [J].电力自动化设备,2019,39(2):84-92.
[6] ABUSHAFA O S H M,DAHIDAH M S A,GADOUE S M,et al. Submodule voltage estimation scheme in modular multi-level converters with reduced voltage sensors based on Kalmanfilter approach [J].IEEE Transactions on Industrial Electronics,2018,65(9):7025-7035.
[7] 李兴源,曾琦,王渝红,等. 柔性直流输电系统控制研究综述 [J].高电压技术,2016,42(10):3025-3037.
[8] 黄守道,付雪婷,饶宏,等.基于Semi-Markov的模块化多电平换流器的可靠性分析及其冗余配置策略 [J].电力自动化设备,2018,38(7):128-133.
[9] PICAS R,ZARAGOZA J,POU J,et al.New measuring technique for reducing the number of voltage sensors in modularmultilevel converters[J].IEEE Transactions on Power Electronics,2016,31(1):177-187.
[10] LI B B,SHI S L,WANG B,et al.Fault detection and tolerant control of single IGBT open-circuit failure in modular multilevel converters [J].IEEE Trans on Power Electronics,2016,31(4):3165-3176.
[11] 罗德荣,贺锐智,黄守道,等.模块化多电平变流器子模块电压分组检测中过电压防护策略 [J].电工技术学报,2019,34(14):2957-2969.
作者简介:许文杰(1988.07—),女,汉族,湖北宜昌人,教师,硕士,研究方向:计算机软件工程。
