森林场景可视化和林火模拟仿真技术研究综述
2023-06-20淮永建孟庆阔马天容徐海峰赵曦程明智黄心渊
淮永建,孟庆阔,马天容,徐海峰,赵曦,程明智,黄心渊
1.北京林业大学信息学院,北京 100083;2.吉林动画学院VR学院,长春 130000;3.北京印刷学院新媒体学院,北京 102600;4.中国传媒大学动画与艺术设计学院,北京 100024
0 引言
随着气候变暖、恶劣气候气象条件造成森林火灾频发,给国民经济和消防救援带来巨大挑战,已成为全球主要的自然灾害。例如,2019 年巴西和澳大利亚森林大火、2020 年我国四川大凉山火灾等(Dowdy 等,2017;Masinda 等,2021)均造成了巨大损失。通过构建基于虚拟现实技术和可视化技术的森林火灾虚拟仿真平台,实现森林场景重建以及不同火源的林火行为快速模拟仿真,可以对火场的救援指挥和火场灾害评估提供可视化的决策支持。目前,林火模拟仿真、火场复现、预测和灾害评估已逐渐成为林业虚拟仿真的研究热点。
森林场景重建和实时渲染技术成为研究焦点,也是因为森林场景的真实感搭建是进行林火蔓延模拟仿真研究的基础,实时生成逼真的森林场景有助于林火行为的模拟仿真。然而,树木形态结构复杂,针对不同树木进行单木建模可以很好构建并还原树木的几何形态结构,但森林自然场景的建模渲染技术很难实现差异性的树木重建。森林场景建模与渲染对于相关硬件与算法要求很高,当场景中的树木数量迅速增加时,整个场景的实时计算与渲染的复杂度指数级上升,无法保证近距离内树木的真实感(卢宇,2011)。
林火蔓延是林火行为的一部分。森林可燃物从起火开始,发展、蔓延、减弱直至熄灭,整个过程中表现出的特征及规律称为林火行为。火焰的强度、高度及蔓延速度是描述林火行为的3 个定量指标。近年来,随着研究逐渐深入,影响林火蔓延的要素主要分为可燃物、地形与气象。林火蔓延指的是多相、多组分可燃物在一定的地形和气象因素影响下燃烧以及向周围环境扩散的过程。研究者通过考虑林火蔓延过程中的物理化学反应或者通过统计方法将影响林火行为的因素参数化,进而构建出适用于不同场景的林火模型。
当前的林火蔓延模型适用性较差,只能运用于特定条件下的场景构建,国外的林火模型部分参数只适用于本土环境而不适用于我国。这些参数需要通过实际的森林点火实验获取,但我国大部分地区不具备预报这些参数的条件。目前相关研究中可燃物模型的划分仍没有一个确定标准,依旧参考国外标准,不过郑焕能和骆介禹仍在可燃物模型方面做出了一些探索(王晓红 等,2013)。同时,气象模型研究也不足以支撑我国林火蔓延模型研究,亟需对我国特殊地形、气象以及可燃物条件下的林火蔓延模型开展研究。
本文通过对真实森林景观进行高度真实感的3 维可视化重建技术进行讨论研究,可以帮助研究者构建林木模型库,并实现森林景观区域高度真实感的3 维可视化重建。在为林火模拟仿真技术的应用提供坚实基础的同时,进一步探究林火蔓延机理,帮助研究人员建立能精确反映林火燃烧过程和热解物理特性的林火蔓延和扩散模型,实现林火燃烧过程的实时可视化仿真模拟。主要内容包括对森林场景可视化和林火模拟仿真技术涉及的方法进行分类并详细介绍,归纳森林场景可视化和林火模拟仿真技术的理论基础,基于具体的应用场景表明其适用范围,直观表达不同方法的优缺点,并对未来的研究方向进行展望。
1 森林场景可视化
森林被定义为一个以树木为主要成分的生物群落(Gao 等,2020),其结构影响了森林生产力、生物多样性和生物栖息地,决定着森林生态系统服务质量。就系统学而言,森林是一个复杂系统,其复杂性可归因于结构多样性,即空间分布格局与物种多样性,而在森林研究过程中往往以单木结构作为基础研究,并深入探究单木器官的构建方法(任非儿 等,2021),因为其个体特征客观反映了森林的结构特征和生长过程。本文对3 维林木结构的虚拟建模方法进行研究,将这些方法分为设计与重建两类。设计即使用自定义树木的形状与结构规则来创建模型,主要包括基于L 系统(L-system)和基于自定义草图或交互式的建模方法。重建则表示依照真实世界的林分特征数据(图像与点云等)对林木进行重建。
1.1 基于规则的林木建模方法
1.1.1 L-系统
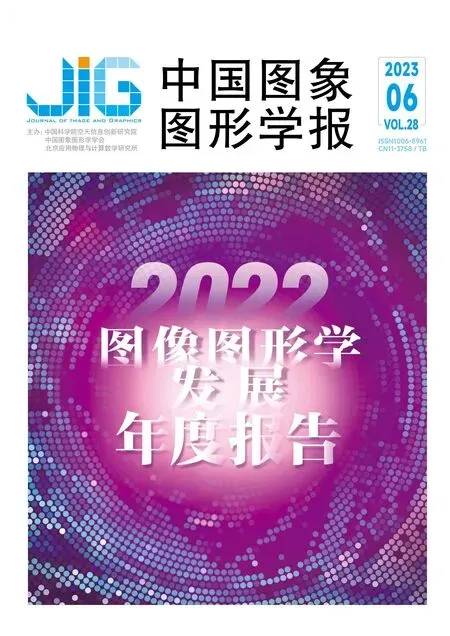
Lindenmayer(1968)提出L-system 并对简单多细胞生物的发育过程进行字符串描述。L-system是一种并行的字符串重写系统,其文法规则基于符号定义,给定相应的文法规则并通过字符串重写和替换就能重建出目标模型。同样,植物的生长过程也具有自相似的特性,因此L-system 随之得以应用于植物建模。图1是一个L-system生长树模型示例,主要包含语法规则和字符解释两部分。语法规则指导指令产生新的字符串,字符解释则表示相关操作(分支创建、叶子创建以及角度旋转)。在界定终止符和非终止符后,由第1条规则迭代生成最终模型。迄今为止,国内外许多植物建模应用软件都是基于L-系统开发的,如Xfrog、SpeedTree和L-Studio等。
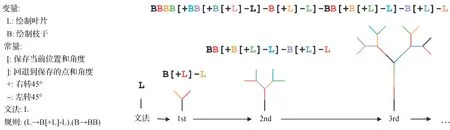
图1 L-system示例(Okura,2022)Fig.1 L-system example(Okura,2022)
此外,许多研究在进行树木建模时也使用了L-system 进行结构生长。例如,Shlyakhter 等人(2001)采用基于图像运动结构恢复的建模方法为树木骨架定义文法规则,该方法由基于规则和基于图像的方法融合而成,具有开创性意义。此外,L 系统文法的优点在于它允许其他优化算法对其进行增长和泛化,增加了扩展或推广模型的可能性。
上述研究为树木建模抽取规则奠定了基础,但研究者需要充分掌握树木结构才能构建符合客观实际的模型。树木结构科学可追溯至Leonardo da Vinc规则(即任意高度上一个分支点以上的所有树枝横截面积之和等于该点所在树干或树枝的横截面积)以及Thompson(1992)对树木的生长与形态关系的探究。简而言之,树木结构是其遗传、发育以及各个分支对自然环境适应度的表征,只有对生物学和几何学充分了解,才能定义出更接近于真实树木的文法规则。
1.1.2 基于自定义方法建模
基于自定义方法建模一般是半自动化的,其目的是为了协助用户创新和设计的过程,主要分为基于手绘或草图的设计方法和基于交互式的设计方法。基于草图建模是指用户根据自定义的2 维简笔图或素描,结合重建算法生成3 维树木模型;基于交互式建模则一般结合VR(virtual reality)设备使用户在沉浸式虚拟场景中完成设计。
Okabe 等人(2006)提出一种可编辑式的草图建模方法,首先输入自定义的手绘草图,根据2 维距离场计算枝干的深度信息,再使用贪心算法逐个添加枝干后进一步建立体素模型。该方法不仅方便快捷,还支持用户的编辑操作(添加、修改及删除分支),但其未考虑树木的自然生长规则。而Chen 等人(2008)则在使用草图建模的过程中加入了自相似的指导规则,使构建出的树木模型更加逼真自然,并建立了树木模型资料库作为先验知识。该方法适于重建具有自相似特征的树木,但对棕榈树或云杉等不具有自相似特性的树种进行重建还是非常困难。
为了解决多样性树种的兼容性问题,涌现出许多研究。如Makowski 等人(2019)为构建真实复杂的生态系统收集了多达50 万株的树木结构形态数据,并为建立生物群落系统仿真提供了相应支持。该方法不仅考虑了同种植物不同植株间的自相似,还考虑了不同种类间的自相似,其建立的异质场景如图2 所示。Hädrich 等人(2021)和Pałubicki 等人(2022)也在构建大规模森林场景时采用了自组织方法构建树木模型,首先建立多个分支的草图模块,再根据自组织算法自动拼接为完整的树模型草图,该方法无需人工绘制草图,非常适用于大规模森林场景重建。
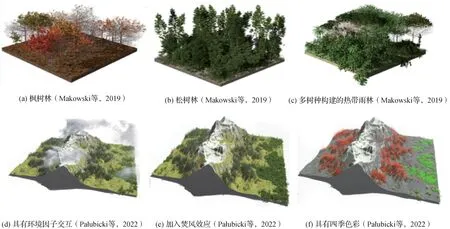
图2 基于草图构建的森林场景Fig.2 The forest scene constructed based on the sketch((a)maple forest(Makowski et al.,2019);(b)pine forest(Makowski et al.,2019);(c)multi-species tropical rainforest(Makowski et al.,2019);(d)forest scene with interaction of environmental factors(Pałubicki et al.,2022);(e)forest scene with foehn effect(Pałubicki et al.,2022);(f)forest scene with the colors of the four seasons(Pałubicki et al.,2022))
由于绘制的草图都是2 维图像,仅能表示树木轮廓,对定义3 维结构(如树枝空间角度等)具有一定歧义性,从2 维分支推断出2 维骨架效率并不高。由此,Liu 等人(2019)提出一种基于6 自由度运动控制器的虚拟植物建模系统,能使用户在沉浸式环境下使用控制器绘制3 维树木,以及灵活地进行枝干平移和旋转操作,但对细枝的建立并不友好,树木的建模效果比较依赖于用户操作。Yuan 和Huai(2021)提出了一种新的基于VR 的树木建模方法,首先对用户输入进行草图化用于建立3 维分支骨架,再根据矢量投影法平滑枝干细节,最后引入Perlin 噪声随机生成细枝叶方法。该方法建模具有强烈的真实感,为未来虚拟现实沉浸式建模研究提供了基础。
1.2 基于林分特征的真实场景重建方法
1.2.1 基于图像建模
在林木重建中,基于图像建模是较为常见的方法,其具有采集便捷、信息丰富等特点。得益于计算机图形学和计算机视觉的发展,虚拟林木建模可以根据单目或多目图像推断出空间关系和结构轮廓,从而构建树枝和树干的拓扑关系并描绘其几何结构。
Quan 等人(2006)提出了一种自动化构建树模型的技术,通过采集时间序列图像结合相机参数进行配准,生成该组图像的空间点云集合,用于描绘植物形状,并根据Graph Partition 算法对叶子进行自动分割,最后使用奇异值分解(singular value decomposition,SVD)对叶片进行重构以及纹理贴图。该算法目前广泛应用于灌木重建,但由于图像中一些枝干常被遮蔽,在树枝构建阶段具有一定局限性。针对该问题,研究者采用交互式编辑方法标记枝干。同时,为了减少人为主观性影响和提高建模效率,Tan等人(2007)基于上述方法提出了自动化的枝干标记法,具体重建方法如图3所示。

图3 基于多幅图像的建模方法(Tan等,2007)Fig.3 Modeling method based on multiple images(Tan et al.,2007)
1)在第1 阶段沿用Quan 等人(2006)和Tan 等人(2017)的图像配准和点云采集方法。
2)将点云数据划分枝干集群(每个子图由一个主枝和多个子枝组成),根据自下而上的方式对每个子图进行重建,当一个子图重建完成后,迭代建立其他子图,直到所有子图遍历完成为止。
3)由于第2 阶段只建立了可见树枝,一些遮挡的树枝信息无法捕获。根据分形假设定理(即枝干结构是局部自相似的)对遮挡的树枝使用子图复制的方法对其复制生长,直到逼近轮廓边界为止。最后,当枝干构建完备,需要使用均值漂移算法对每个子图细致区域进行聚类得到叶片分布,再通过LDI(leaf density index)对每个子图区域进行叶片填充。
尽管Tan 等人(2007)的方法采用的基于多目图像的建模方式适用于较空旷的场景,但仍无法解决较为复杂场景的自动分割问题。因此Tan 等人(2008)进行深入研究后提出了一种基于图像建模和基于草图建模的混合单目图像建模方法。该方法为减小规则约束和参数调整的成本,将枝干、树冠的提取过程设计为用户自定义绘制,其间需要人工干预,但与Quan 等人(2006)的方法相比,建模过程得到了简化。
如图4(a)所示,用户可最少在树木图像上绘制两笔,第1 笔围绕树冠画出冠状区域,第2 笔画出树干主干区域,即可从绘制的分支笔划中自动寻找可见分支,子枝生长过程根据预先建立的枝干数据库进行,并使用高斯混合模型提取叶片分布位置,进而在树枝生长过程中实现自动插入叶片。较前述方法而言,该方法便捷、快速,能具备较高的保真度,并能对多棵树场景进行处理,如图4(b)(c)所示,这是前述方法不能做到的。

图4 基于单幅图像的建模方法(Tan等,2008)Fig.4 Modeling method based on a single image(Tan et al.,2008)((a)simple strokes;(b)multiple trees illustration;(c)modeling effect)
虽然上述基于图像建模的研究已经取得不错的成果,但基本都需要人为干预,而且对于遮蔽性较强的场景建模效果并不理想,因此近年来一些研究者采用深度学习提出了更自动化的树木建模方法。Isokane 等人(2018)提出一种使用贝叶斯网络推断被遮蔽枝干位置的方法,首先将每幅图像中树木的2维姿态作为子视图,再将多幅子视图合并到3维体素空间中获得枝干概率分布,最后采用粒子流模拟法从概率分布中生成显式的枝干结构,相比Quan等人(2006)和Tan 等人(2007,2008)的方法,该方法能重建出更为准确的树木结构。
此外,Li 等人(2021)使用3 个级联神经网络进行树木重建。首先使用DeepLab-V3 进行语义分割,实现前景分离获得树木分割掩码,第2个卷积神经网络(convolutional neural network,CNN)用于识别具体树,第3 个CNN 用于树木获得RBV(radial bounding volumes),即多层圆柱层叠加体,最后使用Bi-Modal Growth重建主干和细枝。相比Isokane等人(2018)的方法,该方法实现了枝干提取自动化,对许多树种具有普适性,并能有效解决叶子遮挡严重的问题。
1.2.2 基于点云建模
随着激光雷达技术的发展,其自动化程度逐渐提高、通用性逐渐增强,进而适用于大规模场景作业,已广泛应用于虚拟林木建模。点云的获取方法主要分为手动磁控、摄影测量和激光雷达(light detection and ranging,LiDAR)(Bournez 等,2017)。手动磁控是早期的点云获取方式,需要对目标物进行接触式采样,不仅费时费力且采样难度大,而摄影测量和LiDAR 均为非接触式自动采集。摄影测量方法根据移动拍摄采集多幅图像参数、重叠等信息,例如移动摄影测量(structure from motion,SfM),再通过图像匹配算法生成点云数据。LiDAR 则使用发射器主动向地物发射激光脉冲,接收器接收地物植被返回的脉冲信号,不同回波点(X,Y,Z)反映了不同地物植被从冠层表面到冠层内部枝干、背景等相关的结构信息。
相比摄影测量,LiDAR 更广泛应用于3D 植被建模(Guo 等,2021),并根据不同回波方式主要分为波形和点云两类。通过发射激光脉冲获取全波形数据,进而接收器实现对整个地物植被的垂直结构信息的记录,点云数据也进一步以3 维离散点(X,Y,Z)记录植被的结构信息。尽管全波形数据记录了丰富的植被结构信息,但光斑较大很难适用于精细化的3 维林木建模。根据不同的平台,激光雷达主要分为地基、机载和星载3 类,但不同传感器和平台具有一定局限性。例如,地面激光雷达(terrestrial laser scanning,TLS)自下而上扫描地物植被,在高郁度区域脉冲难以捕获冠层顶部结构。由于点云是非结构化数据,没有具体的拓扑结构,所以将点云作为基础数据对树木进行重构较为困难,此外枝叶混合与枝干的复杂性也增加了建模难度。在基于点云重建树木几何结构研究中,主要分为3 类,即基于包络形态建模、基于体素化建模和基于几何形态与图论建模。
1)基于包络形态绘制建模侧重于对树木冠层结构进行分析,主要利用3 维包络图描述冠层表面结构,冠层结构作为树木的重要构成影响了光合作用分配(Magney 等,2016)。基于几何描绘冠层形状的研究主要为3 类,即Alhpa Shape、凹包(concave hull)和凸包(convex hull)(Xu 等,2021)。据Colaço 等人(2017)所述,Alhpa Shape 对冠形描述最具代表性,其不仅包含凸包和凹包,而且加入了刚体变换对冠层表面进行拓展性描述。针对冠层重建是对树木3 维模型的简化描述,简洁的几何形状能高效快速地构建紧凑的林分场景,减少计算复杂度和模型存储空间(Cluzeau 等,1995)。虽然该方法对树木结构形状高度简化,但是树木的几何结构(树高、枝下高、冠幅、胸径和树冠投影)仍可通过迭代损失函数推断估计(Chakraborty 等,2019)。尽管包络形态的开闭性可以降低噪声的敏感性,对于几何形态简单的树木(如阔叶树)效果显著(Janoutová等,2019),但仍可能会丢失冠内信息。该类方法侧重于对冠层信息描述,为节约计算成本,很少对冠内信息进行描述。特别是在基于凸包形态重建中,默认叶片分布是均匀的(Bournez 等,2019),实际上叶片分布是分形的(Zeide 和Pfeifer,1991)。简而言之,基于包络形态建模虽然节省了计算开销,但是丢失了树冠内部结构信息,导致模型结构精度低,叶片分布也不符合生态学规律。
2)基于体素化建模是将点云转换为体素空间,根据点云空间分布和激光强度为每个体素赋值。体素值可作为识别对象以及去噪的判定阈值,在多个体素中识别冠点以及树形结构。基于八叉树(Octree)的树木建模是体素化以及图论建模具有代表性的一类建模方法(曹伟 等,2021)。例如,Bucksch 等人(2010)提出的CAMPINO(collapsing and merging procedures in octree-graphs)建模方法可以从密度不均、含噪声与少量数据缺失的TLS(terrestrial laser scanning)点云中提取与原始点云高度吻合的树木骨架结构,但其对体素规格大小比较敏感。体素规格过大会出现拓扑连接错误,体素规格过小则会增加计算成本,降低建模效率,合理的体素设定才能够较好地均衡算法时空复杂度和树木模型保真度。此外,体素结构可以更好地表征冠层空间以及叶片分布(Barton等,2020)。Janoutová等人(2019)提出的基于体素结构定量测量方法,不仅解决了体素规格难以确定的问题,还可以补全体素断链等问题,同时基于体素化的点云,可以更好地控制叶片插入节点。对比基于包络形态建模,基于体素空间建模能适用于结构精度相对较低的树模型,而且能保留更多的冠层细节,但该类方法的时空复杂度依赖于体素规格大小的设定。
3)基于几何形态和图论建模。由于树木结构在3 维空间中具有相对完整的拓扑结构和几何形状,所以可将其与先验假设模型进行结合。其中,定量结构模型(quantitative structure model,QSM)是最具有代表性的算法,原理是通过圆柱体拟合点云后将枝干逐层级划分并将其特征(体积和分支大小)量化(Raumonen 等,2013)。基于圆柱体拟合的模型,例如TreeQSM(Calders 等,2015)和SimpleTree(Hackenberg等,2015),对具有复杂拓扑结构的树木而言,基于分段拟合的方法具有一定局限性,例如对果树、热带森林中的板根树木建模效果并不理想(Calders等,2020),还需要注入先验知识以及手动调参,进一步降低了模型自动化效率。
除上述方法外,基于图论的树木骨架自动提取方法也得到广泛应用。Verroust 和Lazarus(1999)提出了根据点集邻接图搜寻最短路径,实现骨架线提取,但该方法在稀疏点云上会出现断连问题。Dey和Sun(2006)为了解决上述问题,使用网格法分解3 维内侧轴并抽取点云结构,然而会出现边界连续而中轴封闭的问题,导致无法估计内侧轴的情况。Delagrange 等人(2014)改进了Verroust 的邻接图提取算法,创建了基于L 系统的Pypetree,对孤立木和小树能实现较高质量的重建,但还是难以应对复杂的树木结构。因此,Du等人(2019)提出了AdTree算法,基于最小生成树算法有效提取树木骨架,并在迭代对骨架进行简化后沿骨架线采用圆柱体拟合进一步生成模型;而Fan等人(2020)则结合Adtree和TreeQSM提出了AdQSM,形成了一套具有树木3维重建和定量结构估计的系统。
1.3 小结
本节主要集中讨论了近些年虚拟林木的建模与绘制,并将这些方法归为重建和设计两类。上述方法多数用来构建单木模型,并作为大规模森林场景重建的理论基础,进而实现森林场景可视化。基于规则生成、草图或交互式对林木进行设计,虽然过程直观,但这类方法不仅需要充分地掌握植物学原理,而且还需调整多个控制参数,存在效率低、保真度缺乏等问题。基于图像的建模方法是最为便捷的方式,但并不适用于重建具有高遮蔽性的场景,然而在森林中遮蔽现象是比较常见的。基于点云重构模型是保真度最高的方法,但比较耗费人力物力,模型准确性也依赖前期数据采集和预处理工作(数据采集、配准、去噪和重构微调),对构建大规模森林场景具有一定局限性。
2 林火仿真模型
林火蔓延模型是林火模拟仿真技术的重要组成部分,研究者在简化条件的前提下,对影响林火蔓延的各项参数进行数学化处理,得到林火行为与各项参数间的定量关系来构建林火蔓延模型。目前应用较广的林火蔓延模型有美国的Rothermel 模型、澳大利亚的 McArthur 模型、加拿大林火蔓延模型以及我国的王正非林火蔓延模型等。根据是否考虑林火燃烧过程中的物理化学反应过程以及是否采用统计方法,现有的林火蔓延模型分为3 类,即物理模型、经验模型以及半经验模型(Pastor 等,2003)。本文通过介绍各类模型的理论基础及实现方法,并结合国内外对各类模型的研究进展对不同模型的侧重点以及优缺点进行归纳分析。
2.1 林火蔓延模型
2.1.1 物理模型
林火发生至消亡的整个过程是一个释放复杂能量组合的燃烧化学过程以及将该能量传输到周围未燃烧的燃料后并将其点燃的热传导过程。物理模型是通过对燃烧过程中的化学过程与物理过程在广泛的时空尺度上的相互作用进行分析所建立的林火行为模型(Sullivan,2009a)。其中,有的物理模型不仅考虑燃烧过程中的物理过程,而且通过实验获取了模型的一些参数,因此也称为半物理模型。由于这两类物理模型构建均不以经验或统计规则为主来预测火焰的蔓延和行为,而是依靠物理和化学公式来建模火灾行为,因此本文将其均归类为物理模型。Grishin(1997)将建立确定性物理模型分为5 个阶段,如图5所示。
早期提出的物理模型是基于物理守恒定律并以热辐射作为主要传热方式将火焰蔓延速度的预测问题转换为热传导计算问题后建立的热扩散微分方程,如Fons 等人(1946)提出的林火蔓延模型等。研究人员在上述模型的基础上开发了基于更复杂机理的物理模型。例如,法国能源实验室的Séro-Guillaume 和Margerit(2002)开发的LEMTA(Laboratoire d’Énergétique et de Mécanique Théorique et Appliquée)模型,该模型基于简化的燃烧化学和固相化学将气、固相相互作用方程卷积为宏观量,从而在宏观尺度上对燃烧过程进行分析,并采用不可逆热力学闭合方程组的扩展作为模型的理论基础,进一步对燃烧过程中的机理进行研究。
在此之前,Grishin(1996)模型不仅考虑了燃烧中基本的物理化学过程,并将气相和固相中的质量、动量和能量守恒原理与边界条件相结合,进一步构建出林火多相模型对火锋的结构及发展进行预测。此外,Larini 等人(1998)开发的IUSTI(Institut Universitaire des Systémes Thermiqes Industriels)模型对Grishi 模型的建模方法进行扩展,通过将单个气相与任意数量的固相之间的质量、动量和能量交换项进行耦合,实现在更小的尺度上求解化学和守恒方程。
许多研究者为了构建更完善的林火蔓延模型,对林火燃烧过程的物理化学现象进行深入的研究。Hädrich 等人(2021)通过将林火燃烧过程与改变大气温度的热传递过程中的求解器进行耦合,对林火过程中单木燃烧进行模拟,该方法不仅能够更真实地模拟林火的传播过程,还可以实现对林火模拟不同详细程度上的选择,其林火蔓延场景如图6 所示。Pirk 等人(2017)对林火燃烧行为中的木材热解过程进行研究,采用一系列非线性无量纲参数对跨炭层和不同木质组织的体积传热进行描述,如无量纲参数c来近似炭层的绝缘效果,实现对林火燃烧过程中重要的炭绝缘作用的详细物理模拟。

图6 森林火灾蔓延模拟场景(Hädrich等,2021)Fig.6 Simulation scenario of forest fire spread(Hädrich et al.,2021)
You 等人(2022)基于有限状态机原理对Pirk 等人(2017)的模型进行优化,根据风场动态调整使用形态结构模拟的树形模块,通过树形模块间的交互来驱动树形模块的状态转移,实现林火蔓延可视化仿真。该模型对燃烧热解导致树木含水量改变的物理过程进行分析,并采用热重量分析法得到木材质量损失率方程,实现了对林火燃烧过程中物理机理的进一步研究。
2.1.2 经验模型
经验模型不考虑林火燃烧过程中的物理机制,仅对实验数据进行统计分析并拟合建立模型方程,如McArthur 模型、加拿大林火蔓延模型(Canadian forest fire behaviour prediction,CFFBP)等,其最早的研究重点是确定能够直观描述火灾行为的关键特征,如头部火焰的前向蔓延率(rate of fire spread,ROS)以及火焰的高度和角度等。
研究人员使用一种“设计并点燃实验性火灾”的方法实现对林火行为预测经验模型的开发,该方法可分为4 部分。1)设置可燃物并量化分析燃烧场景特征(可燃物负荷、高度、水分含量,燃烧特性以及坡度等);2)对实验场景的大气环境变量(风速、风向、气温和相对湿度等)进行观察与测量;3)对燃烧过程中火焰行为特征(火焰蔓延速度、蔓延形状以及燃烧速度等)进行观察与测量;4)统计分析燃烧实验中所有测量结果之间的关系,构建相应的模型(Sullivan,2009b)。
McArthur 模型是Noble 等人(1980)对McArthur火险尺的数学描述,该模型是在多次点燃实验的基础上导出林火蔓延速度与各参数之间定量的关系式后构建成功的。McArthur模型能够测量并预测林火蔓延速度,同时可以预报火险天气以及部分重要的林火行为参数。但由于其是基于澳大利亚的实验环境开发的经验模型,场景较为单一,因此适用范围主要为草地与桉树林。目前较为先进的林火蔓延模型的构建都是在这类传统林火蔓延模型的基础上构建的(康庆江,2022)。例如,澳大利亚墨尔本大学研发的菲尼克斯(Phoenix),一种灌木火焰蔓延模拟系统,是在McArthur 模型基础上设计建立的,能够实现对澳大利亚林火蔓延过程的精准预测。
同样,加拿大林火蔓延模型(Canadian forest fire behaviour prediction,CFFBP)(Forestry Canada Fire Danger Group,1992)是在对加拿大林火长期研究的基础上,进行近500 次室内实验,并结合实际林火观测数据构建的经验模型。CFFBP根据加拿大的植被状况将可燃物划分为5类,并细分为16种类型,能够基于特定燃料类型的天气、燃料湿度、一年中的时间和地形变量预测林火的蔓延速度(rate of fire spread,ROS)和强度。加拿大林火蔓延模型的最终版本与加拿大森林火灾天气指数系统(Canadian forest fire weather index,CFWI)一同构成了加拿大森林火灾危险等级系统(Canada forest fire danger risk system,CFFDRS)。
相关研究以加拿大林火蔓延模型为基础,衍生出许多优秀的林火蔓延模型。如Prometheus(Tymstra 等,2010)模型通过采用加拿大林火蔓延模型来计算火势蔓延速率和其他火灾行为特征,不仅将其中的可燃物类型作为默认类型还进行了部分扩展;Pais 等人(2021)开发的Cell2Fire 火灾增长模拟器则基于加拿大林火蔓延模型预测的蔓延速率实现了对火灾环境中每个单元火势蔓延趋势的控制,该模拟器不仅预测效果较好而且具有模拟速度快、可扩展程度高的优点。图7为Cell2Fire模型(Pais等,2021)与先进的模拟器Prometheus 对加拿大某地区的林火痕迹预测结果对比。可以看出,两种模型的预测结果十分相似,表明Cell2Fire 模型构建获得显著成功。
图7 Cell2Fire模型与先进模拟器Prometheus的林火痕迹预测结果对比Fig.7 Comparison of forest fire trace prediction results between Cell2Fire model and the advanced simulator prometheus((a)Prometheus model prediction result;(b)real fire projected in grid format;(c)Cell2Fire model prediction result(Pais et al.,2021))
2.1.3 半经验模型
半经验模型结合了物理模型与经验模型的优点,同时考虑了林火蔓延过程中的物理化学反应以及具体实验采用的统计分析方法。典型的半经验模型包括中国的王正非模型以及美国的Rothermel 模型等。王正非林火蔓延模型是根据大小兴安岭、四川省的多次火烧试验数据并结合林火燃烧过程中的物理机制分析得出的半经验林火蔓延模型(张晓婷等,2020)。美国的Rothermel 模型是在遵守物理守恒定律的基础上,根据林火蔓延过程中的物理机制进行设计,并在具体实验中对实验结果进行统计分析后建立的半经验模型,该模型在相关研究中有着广泛应用。
王正非模型针对我国森林的构成特点,通过选取可燃物类型、风速和坡度作为主要影响因子对林火蔓延情况进行预测。该模型的优点是针对性强且使用方便,缺点在于该模型仅能在室内或无风条件下根据实验数据给出初始蔓延速度。因此,许多学者针对王正非模型的缺点开展相关研究并对其进行优化与改进。毛贤敏和徐文兴(1991)考虑风向和地形的组合,对王正非模型提出的坡度影响因子继续改进,模拟提出了上坡、下坡、左平坡、右平坡和风共5 个方向的方程组,改进了模型在实际情况中的预测结果。而张晓婷等人(2020)在王正非模型的基础上进一步研究了可燃物湿度对林火蔓延初始速度的影响,结合改进后的坡度影响因子实现了风向与坡度的更准确结合,因此使用该林火蔓延改进模型可以得到更精准的预测效果。
Rothermel 模型一般研究火焰前锋的蔓延过程,根据“似稳态”的概念从宏观方面研究林火行为,而不考虑火场的持续燃烧。该模型通常建立在均质的可燃物中,假定可燃物与地形在空间中连续分布,并保持可燃物的含水量以及风速、坡度等参数不变,一般对可燃物的尺寸有所限制,还可能忽略较大的可燃物造成的影响。
Rothermel 模型作为基于能量守恒定律的半经验模型,抽象程度较高,具有较宽的适用范围。但在现实情况中,微观尺度的可燃物很难保持模型的均质前提,因此Rothermel 采用加权平均法获得可燃物的参量(唐晓燕 等,2002),而后Francis 又对空间可燃物异质的林火蔓延进行了相应研究(胡健,2007)。Rothermel 模型通常不适用于对含水量超过35%的可燃物进行燃烧模拟(Weise 和Biging,1997),更因其作为半经验模型,需要多维参数(可燃物、地形及天气等)的输入而导致了不确定性问题的出现。
为了解决不确定性问题,Liu等人(2015)通过构建具有多项式扩展方法的模型,获取截断后的方差分析(analysis of variance,ANOVA)—高维模型表示,对Rothermel 模型中的输入参数进行全局灵敏度分析来确定重要的输入参数。由于重要的输入参数对模型的预测结果影响最大,因此通过减少重要参数的不确定性能够更好地预测火灾行为和降低火灾风险。
与Liu 等人(2015)的目的相同,Ervilha 等人(2017)通过在两种不同的植被火灾场景下采用非侵入性光谱投影(non-intrusive spectral projection,NISP)方法对Rothermel模型中的参数不确定性进行定量研究,在与其他4 种随机方法比较后,证明了NISP 具有执行与快速收敛相关的不确定性定量分析的能力,因此该方法能够提升模型预测的性能并适用于林火传播的随机预测。
为进一步研究可燃物及天气因素对Rothermel模型的影响,Ascoli 等人(2015)将遗传算法(genetic algorithms,GA)与Rothermel 模型相结合,开发了一种构建和校准定制燃料模型的方法,采用遗传算法探索连续且可重复的燃料参数空间,不需要现场采样即可实现燃料模型的校准,基于随机的搜索规则提高了计算的有效性,显著改善了Rothermel 模型的预测结果。Andrews 等人(2013)对模型中风力参数的限制功能进行调查与研究,在对澳大利亚塔斯马尼亚草原大火收集的数据进行重新分析后,结合当前最新的草火数据,提出取消模型中的风力限制能够得到更准确的预测结果,因此其对Rothermel 模型中的风力限制功能进行了进一步完善。
由于半经验模型被认为能够更好地兼顾两种模型的优点,所以许多研究均以建立物理机制更准确、性能更好的半经验模型为目标。Jain 等人(2020)对机器学习(machine learning,ML)方法在林火蔓延模拟中的可行性进行研究,并对机器学习方法在林火蔓延中的应用及问题进行分析说明。采用机器学习方法结合实验数据进行统计分析是解决当前物理模型在建模任务中解释性不足问题的一种方案。
Grasso 和Innocente(2020)在物理方法的基础上进行数值实验,建立了快速模拟的火灾传播模型FirePromf,既能够保证其物理准确性,还可以更快更好地完成实时场景下的林火模拟预测任务。
2.2 林火蔓延行为仿真
林火蔓延模型构建之后,主要是在2维或3维空间内实现林火行为模拟仿真。消防部门可以将这种可视化模拟作为有力的支持,确定消防规划策略。目前主要有矢量数据和栅格数据两类空间表达方式用于模拟林火的空间传播。矢量模型通常基于惠更斯原理,而栅格模型一般采用元胞自动机。
惠更斯原理(Anderson 等,1982)最早在17 世纪提出并用来描述光波。1990 年,Richards 提出了一个较为成熟的基于惠更斯原理的林火蔓延模型(Finney,1998)。目前,基于美国林务局的火灾行为预测系统的FARSITE 火场生长模拟器是一个基于矢量的惠更斯类型模型,同时考虑了燃烧的热分解与热传导过程,并将燃烧产生的热气流和大气高梯度风气流的运动机理纳入了模型(Pais等,2021)。
元胞自动机因具有与林火行为类似的自组织性而用于模拟林火的空间传播。Zheng 等人(2017)将ELM(extreme learning machine)与传统的森林火灾CA(cellular automaton)框架相结合,提出一种新的元胞自动机建模方法,可以有效地描述风速对火灾扩散模式的影响,其对实际火灾行为的模拟性能也较之前的研究得到了明显提高。
2.3 其他模型研究
可燃物、地形与气象因素是影响林火蔓延的主要因素。由于缺乏大气反馈,传统的林火蔓延模型并不总是能够准确地预测林火行为的变化,最近的研究发现了更多与林火规模相关的天气细节,以及林火行为与更大规模的天气机制之间的联系(Bakhshaii 和Johnson,2019)。为了耦合火灾和大气之间复杂的相互作用,实现准确地模拟林火的蔓延,研究者使用耦合数值天气预测(numerical weather prediction,NWP)和火灾行为模型来表达这些相关过程和交互作用。例如,Clark 等人(2004)提出的林火—大气耦合模型、Coen等人(2013)提出的WRF-Fire林火—大气耦合模型等。
林火—大气耦合模型还取得了一些更大的进展。Filippi 等人(2018)提出一种在大涡模拟(large eddy simulation,LES)模式下运行的中尺度非流体静态(meso-scale non-hydrostatic,Meso-NH)大气模型与 ForeFire 火焰蔓延模型之间的耦合方法,并使用亚米分辨率来模拟火焰前锋以及2 400 m 到50 m 分辨率的嵌套网格进行大气模拟,通过对不断变化的气象因素进行及时更新来实时调整和适应火线位置,进而在模拟仿真出大型火灾中发生的一些复杂现象的同时仍然保持实时响应。
Coen 等人(2013)将WRF-Fire 林火行为模型集成到WRF(weather research and forecasting)数值天气预测系统中,然后探究模拟林火行为的敏感性来解释外部参数对整体火灾蔓延状况的影响,再现了草、灌木和森林凋落物燃料类型之间火焰强度和蔓延形状的预期差异,成功表达了林火、大气模型之间的动态耦合。此外,Muñoz-Esparza 等人(2018)提出一种局部降低人工粘度的混合阶水平集方法,对WRF-Fire 算法进行改进,既能够保持数值精度,还大幅降低了高阶离散化的计算代价,并将扩散率误差降低至1%。
相对于对林火—大气耦合模型的探究,将火灾动态地纳入生态水文的模型很少。Bart 等人(2020)提出一种对分布式生态水文模型RHESSys(regional hydro-ecologic simulation system)和火灾扩散模型WMFire进行耦合的火灾效应模型,不仅可以预测林火蔓延状况和当地的微气候条件(如水的状态),还可以提高对气候变化和土地管理下的流域动态的理解,并通过模拟林火和生态水文之间的相互作用,实现野火及其影响与生态水文过程的共同发展。此外,使用生态水文模型后,可以根据由于森林管理而引起的森林结构的变化下不同的林火蔓延行为,解释森林管理中不同处理方法的有效性差异。
3 基于场景可视化的林火模拟仿真应用
林火模拟仿真技术是进行沉浸式林火模拟和交互式灭火仿真研究最重要的组成部分,而真实的森林场景可视化则是进行相关研究的基础。实时生成逼真的森林场景有助于林火行为的模拟仿真,通过构建真实的森林场景来接近林火发生的真实情况,并对复杂的地形以及气象条件进行仿真可视化,可以提高相应感官的沉浸感体验,实现逼真的场景漫游,也是森林场景可视化技术最主要的应用场景。
同时,森林场景可视化和林火模拟仿真技术也应用于森林消防领域,通过基于仿真技术的规划方法来支持战略规划和资源分配,也就是使用林火蔓延模型与消防队员、水泵、直升机等其他相关模型进行协调集成,从而实现3 维虚拟环境中整个林火发生至熄灭过程的可视化模拟,用来表达消防规划策略和资源分配(Chi等,2003)。林火越早得到消防部门的干预就越容易被消灭,而现实的森林火灾发生后,需要对林火的蔓延方向和速度进行重点关注,因此林火行为模拟仿真在消防用途上具有重大意义,能够帮助消防部门减轻部署决策的压力(Dimitropoulos等,2010)。
本节主要探究调查近年来出现的森林场景可视化与林火模拟仿真技术,并联系其实际应用场景全面介绍该技术的侧重点及优缺点。
3.1 森林场景可视化技术应用
使用虚拟现实技术实现大规模森林场景的真实搭建与渲染是一项十分具有挑战的任务。相对其实现难度而言,虚拟森林场景可视化技术的应用范围十分广泛,如视频游戏、园林景观或城市景观场景设计和可视化等领域(Bao 等,2011)。同时,森林场景可视化更是实现林业信息化的关键技术。为了解决大规模森林场景搭建过程中存在的问题,Bao 等人(2011)提出了一种新的树叶建模方法,实现了数千棵树组成的大规模森林场景的实时渲染,解决了视觉效果与模型复杂度之间的平衡问题,使虚拟森林的真实感得到了保证,如图8所示。

图8 森林场景漫游(Bao等,2011)Fig.8 Roaming in the forest scene(Bao et al.,2011)
森林作为一种能够与气候变化进行交互的生态系统,两者之间存在着复杂的耦合关系。因此,Huang 等人(2021)通过将生态建模、程序建模以及虚拟现实技术联系起来,不仅实现了森林场景的重建,更实现了气候与森林之间的交互作用来预测50年间的森林变化,从而提供给用户对未来森林的沉浸式体验。生态学专家基于这种直观的可视化结果,进一步实施全面生态系统可视化和分析方法,能够在得到积极反馈的同时促进专家、公众和政策制定者之间的交流。此外,Cristal 等人(2019)通过一种以用户为中心的决策支持工具,使用基于图像的模型构建方法来构建3 维展台,从而能够有效地模拟和可视化林分的未来,并通过评估不同管理方案和气候情景下的多种生态系统服务来面对气候变化导致森林管理出现的挑战。
森林场景除了在虚拟林业领域的应用,最普遍的使用场景是在森林火灾的蔓延过程中。例如,Huang 等人(2012)开发了一套3 维森林火灾蔓延模拟和可视化系统,充分讨论了地形、植被类型和天气条件等因素影响下逼真的3 维林火蔓延场景,从而实现在真实的3 维森林环境中直观地查看林火进展。Williams 等人(2011)介绍了用于3 维森林景观可视化的更新方法和软件,并演示了使用VNS(visual nature studio)和标准计算机硬件的林火可视化过程。Song 和Lee(2017)通过构建两种不同树种组成的森林来探究林火在具有不同风力强度下的蔓延情况。
3.2 林火模拟仿真技术应用
林火模型通过多年来的研究与完善,对林火行为的仿真模拟程度与真实林火的发生过程十分契合,因此林火模拟仿真技术广泛应用于交互式灭火仿真模拟、森林消防设计及决策等方面,从而为林火管理提供了重要的技术支持。
在交互式灭火仿真模拟中,Moreno 等人(2014)实现了以交互速率模拟森林和城市环境的火灾蔓延算法,通过使用消防VR 模拟器帮助学员体验尽可能真实的火灾情景,从而避免了消防人员在进行真实火灾的练习时发生事故的可能性,成功支持了复杂场景的火灾蔓延仿真。除了帮助培训消防人员外,蔡志勇等人(2022)采用基于元胞自动机的火焰蔓延模型,在Unity 中构建了西南山区典型森林场景,从而实现了森林火灾蔓延的可视化仿真,并以此作为基础模拟了两栖灭火飞机汲水、投水任务的仿真场景,成功设计了国内首套大型固定翼灭火飞机投汲水灭火飞行仿真系统,如图9 所示,实现了固定翼灭火飞机的交互式灭火仿真应用,对于加快我国森林航空消防力量建设具有重要意义。

图9 水陆两栖灭火飞机仿真系统(蔡志勇 等,2022)Fig.9 Simulation system of amphibious fire-fighting aircraft(Cai et al.,2022)
对于蔡志勇等人(2022)构建的水陆两栖灭火飞机仿真系统而言,也可以与森林消防设计和决策任务进行一定程度的耦合。例如,Zhang 等人(2020)设计了一种由森林火灾蔓延和灭火飞机的救援模拟器以及消防粒子群优化救援算法组成的救援系统,实现了森林火灾蔓延(如进攻力量)和森林火灾救援(如防御力量)之间动态救援过程的离线模拟,并将该过程作为一个动态优化问题来实现飞机灭火任务的分配。通过对水陆两栖灭火飞机仿真系统与救援系统的耦合,能够完善虚拟森林消防的整个过程,并在多方面支持消防部门的人员培训及方案决策等工作。但在该救援系统中,由于林火蔓延区域的逐渐增长和灭火飞机的数量需要符合实际,灭火飞机的数量不能随林火范围的增长而增加,因此该系统只适用于对早期森林火灾救援进行消防飞机任务的分配。
除帮助森林消防灭火飞机任务决策之外,Razavi-Termeh 等人(2020)还使用人工智能方法并基于地理信息系统(geographic information system,GIS)实现了森林火灾敏感性绘图(forest fire susceptibility mapping,FFSM),不仅能够对林火发生进行精准预测,还进一步确定了影响森林火灾的最优参数。这些参数包括海拔、降雨量、坡角、温度、坡向、风、与道路间的距离、土地使用状况、与定居点间的距离和土壤类型。
而Moreno 等人(2012)则通过输入静态数据构建出林火蔓延场景,并在运行时通过动态数据(火灾蔓延的状态、天气条件等)的不断生成或更新提出一种基于GIS 的消防模拟器,从而实现林火行为的实时反馈,帮助决策者获得关于潜在风险区域的信息,并为其提供更多的分析方案。
3.3 小结
极端天气的频繁发生导致生态环境愈加受到重视,因此严重危害生态平衡的森林火灾成为关注焦点。研究者基于虚拟现实和可视化技术实现大规模森林场景的重建,并选择或构建合适的林火蔓延模型及空间传播方程,在2维或3维世界中直观地表达林火的蔓延趋势,能够帮助用户或者消防部门提前进行相关任务的决策部署,进一步为森林消防设计与决策任务提供可靠而准确的支撑。
但仅靠森林场景可视化和林火模拟仿真技术无法完整地模拟一场真实可信的森林火灾,所以研究者将林火蔓延模型与大气、生态水文等模型进行耦合,并在实际应用场景中验证了相关技术和模型的有效性。
4 结语
本文主要对森林场景可视化和林火模拟仿真技术进行讨论与研究。将森林场景可视化分为基于规则或程序的林木建模方法和基于林分特征的真实场景重建方法,并对物理模型、经验模型和半经验模型3 类林火蔓延模型进行详细介绍,进而说明了森林场景可视化和林火模拟仿真技术的理论基础、适用范围及优缺点。同时,根据这几类方法和模型在近年来的研究进展,展示了解决大规模场景渲染技术及森林消防等实际领域的一些难题的成果,为进一步构建基于虚拟现实技术和可视化技术的森林火灾虚拟仿真平台提供了理论支撑。
在森林场景可视化技术方面,基于规则与设计的林木建模方式能直观灵活地调整树木结构,但较为依赖设计者对林木结构的表达力,较适用于植物生长设计、沉浸式创作等领域。基于林分特征的真实场景重建方法虽然具有较高的保真度,但比较依赖数据集采集和预处理,该类方法适用于植被定量、小型生态系统模拟等研究。总而言之,林木虚拟建模从最初的2 维字符串替换与重写发展到具有生态功能的3 维和4 维模型,对相关研究提供了理论依据。随着对生态、气候研究的深入,基于林分特征或规则建模均难以满足研究需求,只有实现自动化衍生式模拟才能满足动态仿真需求,这也是该领域所面临的挑战。
林火蔓延模型主要分为物理模型、经验模型和半经验模型3 类。林火蔓延模型和恰当的空间传播方式是林火模拟仿真技术的重要组成部分。物理模型由于其能够良好地表达林火燃烧过程中的物理化学反应以及展示火焰的变化受到研究者的关注;经验模型使用实验获取的相关数据进行数学拟合,可以良好地模拟一些典型场景中的林火蔓延行为,能够对林火蔓延方向和速率的准确性进行保障;半经验模型同时考虑了林火蔓延过程中的物理化学反应以及具体实验采用的统计分析方法,减轻了物理模拟的计算负担,使实时模拟成为可能,该类模型中的Rothermel 模型成为国内外应用最广泛的林火蔓延模型。
近年来林火蔓延相关研究取得了广泛进步,通过实现林火蔓延的可视化,利用虚拟现实技术实现林火蔓延场景的真实感与沉浸感,能够直观展示3 维地形空间内的林火蔓延趋势。实时模拟林火的动态蔓延变化,能够为灭火方案设计提供参考,为科学扑火救火提供决策支持,帮助人类进行防火控火处理,有助于防治森林火灾,挽回重大经济损失及保障救护人员的人身安全,并在保护自然资源的同时提高人类的社会安全感。此外,基于森林场景可视化和林火模拟仿真技术,还能够实现交互式灭火仿真模拟,从而避免在真实火灾场景中进行灭火作业时存在的潜在危险。通过进一步呈现沉浸式的训练场景,可以帮助消防人员学习正确规范的灭火救援流程。因此,构建出能够适应我国可燃物、气象及生态水文等多领域耦合的模型是未来林火蔓延研究的一个重要方向。
致 谢中国图象图形学学会数码艺术专业委员会组织撰写,该专委会更多详情请见链接http://www.csig.org.cn/detail/2389。