燃料操作监控系统自整角机信号处理系统方案设计
2023-06-17张翠兰董升国
张翠兰,董升国
(中国原子能科学研究院,北京 102413)
0 引言
燃料操作监控系统是反应堆换料设备中的核心枢纽,主要是控制、定位、监控换料设备的整个运动过程,保证换料设备的精准定位和控制。在换料设备中,位置指示器采用了绝对编码器、增量编码器、干簧管、电感式传感器和自整角机[1]。由于换料机械设备位置指示的重要性,在换料设备中设立了多通道的位置指示来进行分析定位控制,这样就避免了共模故障的发生,提高了位置指示的精度,更加精确地控制换料设备运动过程。由于自整角机精准的显示位置,具有安全可靠,抗干扰能力和环境适应性强的优点,所以在换料设备中继续使用自整角机作为换料设备重要的位置指示。
本文根据燃料操作监控系统换料设备位置指示和精度的要求,研究设计相应的特殊模数转换模块、信号转换控制柜和信号传输系统,将自整角机输出的模拟量转换为数字量,通过Profibus-DP 现场总线形式传送至PLC 进行逻辑运算及定位控制,最终实现换料设备的精准控制,满足换料设备要求。
1 自整角机
1.1 自整角机分类
自整角机按其用途分为力矩式自整角机和控制式自整角机。
力矩式自整角机用于同步指示系统,直接达到转角随负载转动,将机械角度变换为力矩输出,无力矩放大作用。其接收误差稍大,负载能力较差,只适用于轻负载转矩及精度要求不太高的开环伺服控制系统中。
控制式自整角机用作测角元件,作为角度和位置的检测元件可将机械角度转换为电信号或将角度的数字量转变为电压模拟量,而且精密程度较高,用于精密的闭环控制伺服系统中。
在换料设备中使用控制式自整角机作为位置指示器。
1.2 自整角机工作原理
自整角机是利用自整步特性将转角变为交流电压或由交流电压变为转角的感应式微型电机。控制式自整角机发送机的励磁绕组采用单相交流电源励磁,其三相整步绕组和自整角机接收机的整步绕组对应相接。自整角机接收机的输出绕组接到伺服电动机的控制绕组,伺服电动机驱动负载转动,通过减速器带动自整角机接收机转子构成机械反馈,当自整角机接收机转子偏转后,失调角减小,输出绕组的电压信号减小,直到协调位置。
1.3 自整角机性能指标
自整角机性能指标主要有电气误差、比电压、输出相位移和速度误差。
1)自整角机的精度由电气误差决定,分为三级:0 级为5′,1 级为10′,2 级为20′。
2)比电压:自整角接收机输出电压和失调角关系曲线的斜率。其值等于在协调位置附近失调角变化1°时输出电压的增量,比电压越大,控制系统越灵敏。
3)输出相位移:自整角接收机输出电压的基波分量对自整角发送机激磁电压分量的时间位移差。
4)速度误差:转子转速较高时,发送机两定子绕组切割转子磁场而产生电势,进而会产生附加电流和磁场,因此在接收机输出绕组中感应出电势,使得接收机转子最后所处的位置偏离协调位置。速度误差与转速成正比,速度误差越小越好。
1.4 自整角机选择依据
通常情况下,自整角机的选取取决于换料设备系统要求的精度,只要通过计算能证明自整角机精通道的精度大于系统要求的精度就可以。如果精度选择过高,则会增加系统设计成本。自整角机尺寸规格要根据减速装置安装空间来选择,同时所选的自整角机必须是双轴伸,且安装刻度盘的轴承要带轴套。
2 自整角机信号转换器设计
在燃料操作监控系统中,为了设计通用的转换模块来满足换料设备不同速比之间可调和自整角机清零功能等,设计研制一款新型的自整角机信号转换器来满足换料设备要求。
2.1 自整角机信号转换器分类
自整角机信号转换器依据不同标准研制两种类型:微电路模块和混合集成电路模块。根据转换精度不同,自整角机信号转换器可以分为单通道和双通道两种。
单通道轴角数字转换模块具有结构简单,调试方便,抗冲击性和抗震性好,可靠性较高,动态响应能力强,相对成本低等特点(如图1 所示)。采用两个单通道数字转换模块实现双通道,工作过程是将两个单通道模块输出两种数据引入PLC,根据换料系统各单体设备精粗比值,按照相应的算法,实现转换功能。

图1 单通道模块转换Fig.1 Single channel module conversion
双通道数字转换模块由内部粗精电路将轴角信号转换成交流电信号,然后经转换模块将交流信号转换成数字信号,再通过数据处理模块进行粗精组合、数据纠错等。最后,将数据传输到PLC。同单通道相比,双通道转换精度大大提高,尤其适用在工作环境较恶劣的情况下。如图2所示,采用一个双通道数字转换模块实现双通道,输入接收设备精粗自整角机位置,精粗比值已固化在转换模块中,直接输出设备当前位置的数字量。
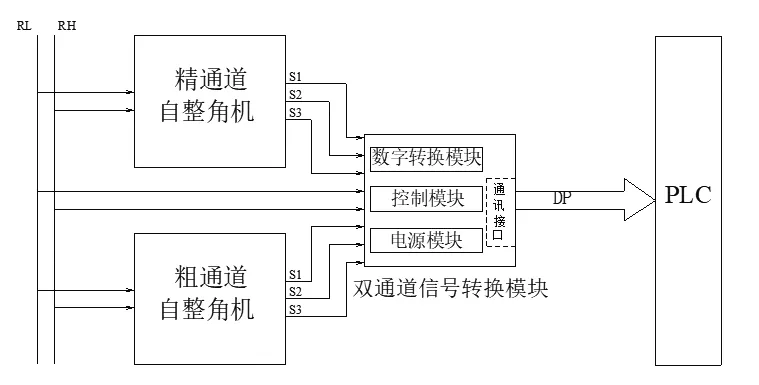
图2 双通道模块转换Fig.2 Dual channel module conversion
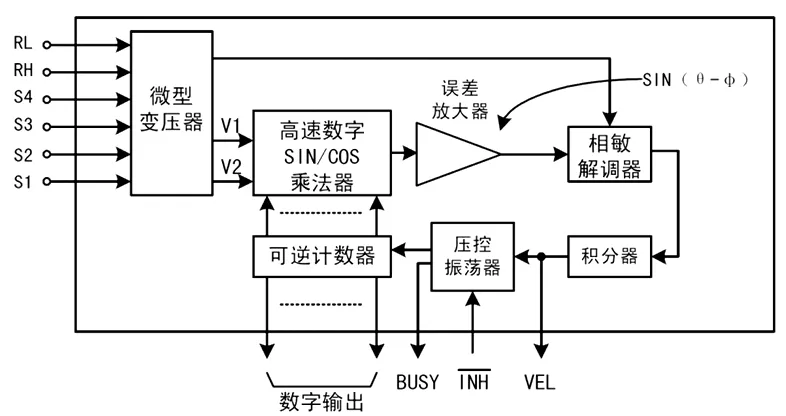
图3 单通道数字转换器原理图Fig.3 Schematic diagram of a single channel digital converter

图4 自整角机信号转换器电路连接Fig.4 Circuit connection of the signal converter for the synchro
2.2 自整角机信号转换器工作原理
微电路模块的自整角机信号转换器是一种采用二阶伺服回路设计和跟踪技术,输出与TTL 电平兼容的并行二进制码,具有三态锁存器功能。模数转换单元主要是通过硬件电路来实现A/D 转换,硬件电路由斯科特(Scott)微型变压器、高速数字式正余弦乘法器、误差放大器、相敏解调器、积分器、压控振荡器(VCO)和可逆计数器组成[2]。其中,SCOTT 变压器是一个关键性部件,它的作用是把自整角机的三相交流信号转换成两相正弦和余弦信号,采用SCOTT 变压器又为信号源提供了有效的隔离。
自整角机输出的三线电压对应连接到转换器的S1、S2和S3 端,SCOTT 变压器输出正弦和余弦两组信号[3]:
正弦信号:V1=KE0sinωtsinθ
余弦信号:V2=KE0sinωtcosθ
这里的θ 是自整角机轴角。
假定可逆计数器当前的代码值是φ,高速数字式正余弦乘法器将V1乘以cosφ,V2乘以sinφ,两信号在经误差放大器相减后得到:
经相敏解调器、积分器、压控振荡器和可逆计数器形成一个闭环回路系统使sin(θ-φ)趋近于零。当这一过程完成时,可逆计数器的代码值φ 在转换器的额定精度范围内等于自整角机的轴角θ,这样就实现了自整角机模数转换,通过三态锁存器送至PLC 来进行精确定位。
2.3 自整角机信号转换器的设计依据
通常自整角机信号转换器是在自整角机选好的基础上进行设计选择,如果脱离了自整角机参数的要求,转换后的数字量有可能与实际转过的角度出现一定的误差,导致出现错误的结果。
自整角机信号转换器设计时考虑的重要参数:
①与自整角机对应的励磁电源和频率;②自整角机输出电压的幅值;③自整角机的速比;④模块功能满足设计要求;⑤转换模块的转换精度;⑥输出信号接口形式;⑦工作环境温度。
2.4 自整角机信号转换器功能设计
自整角机信号转换器采用双通道转换器,主要功能是角度变换,采集双通道自整角机输出的信号,通过信号转换器轴角转换电路实现将模拟量转换为数字量,传送至PLC 进行控制。
2.4.1 信号转换器的速比可调设计
自整角机信号转换器中的速比可调功能。在换料设备中,自整角机双通道比值种类较多,需要在通用的自整角机信号转换器中设置速比可以任意选择,来满足换料设备的要求。
普通的信号转换器速比是固定的,不可调节。信号转换器双通道之间的速比要与自整角发送机一致,由于换料设备的粗精自整角机速比都不一致,比值有4、8、15、25、30、36、40、45、60、80 等。为了提高转换器的通用性,减少模块的备件数量,转换器应具有双通道速比可变换、调整功能,通过软件或硬件拨码开关驱动其内部的控制单元来实现。
2.4.2 信号转换器清零功能设计
在换料设备运动过程中,自整角机是唯一连续、实时测量机械位置的传感器,它的零点确定在换料机控制系统中至关重要。当自整角机在随动系统中用作测量角差时,在调整之前其发送机刻度盘上的读数通常需要进行调零。
在换料设备中,为了方便转换器输出信号与机械位置的零点调整,现设计在信号转换器上安装调零功能,可自动将自整角机当前的位置设定为零位。
2.4.3 信号转换器外形结构设计
在燃料操作监控系统中,自整角机信号转换器采用集成方式,全部安装在同一电气柜内。在设计信号转换器外形结构时,将功能模块及接口电路安装在密封盒内,密封盒需自带数字位置显示,同时设计成带有标准的DIN 导轨,并根据不同接口配备相应接口和连接器,以备信号引出。密封盒应具有体积小,易安装,易维护,散热好的功能。
3 自整角机和信号转换器设计参数验证
根据燃料操作监控系统的定位精度的要求,换料设备角度定位精度是±2′,运动位移机构定位精度±4mm。信号转换器根据换料设备自整角机的双通道比值和信号转换器的分辨率,计算出自整角机误差、信号转换器误差和系统误差,同时要求系统误差小于设备定位精度,这样才能满足换料设备精度要求,保证精准定位。
现以自整角机双通道比值32 位、精度级别0 级5′,信号转换器以分辨率16 位(转换精度5″)为例,通过燃料操作监控系统设备参数,计算自整角机误差和信号转换误差,最终求出系统误差,要求系统误差在换料设备定位精度范围内。
1)自整角机误差计算公式:
角度误差值(′)=精(中)通道量程×5′/360°
位 移 误 差 值(mm)= 精( 中 ) 通 道 量 程×5′/60/360°
2)转换器转换误差计算公式:
角度误差值(′)=64/粗/精(中)比×5″/60′
位 移 误 差 值(mm)=64/ 粗/ 精( 中 ) 比×5″/360°×K
其中,K 值是0.56mm/°,是运动部件自整角机位移值与转角的比值。
3)系统误差计算公式:
角度误差值(′)=((e自)2+(e转)2)1/2
位移误差值(mm)=((e自)2+(e转)2)1/2
最终,通过算出系统误差小于换料设备的定位精度,满足换料工艺位置检测要求。
4 自整角机信号转换系统控制柜设计
在燃料操作监控系统中,自整角机信号转换器是非标研发的双速同步数字转换器,将数字转换模块、控制模块、电源模块和通讯接口组装在密封盒内,所有换料设备的自整角机信号转换器集中安装在控制柜内。自整角机信号转换系统控制柜是整个换料系统的重要设计环节。
控制柜的设计主要包括两个方面,一是柜体结构设计,即尺寸的确定、柜体强度设计和外观造型,二是柜内部设计,包括尺寸选择、电气元件布局、柜内走线、通风散热等。
控制柜上集中安装操作面板和显示屏。操作面板上可以设置速比和清零功能,同时可以手动选择投入与自整角机对应的转换器模块;显示屏应能统一显示转换器的位置数据、状态和故障信号。在显示屏上需要显示的状态信号有:通断电、温度、励磁电源电压、频率、自整角机输出信号电压、累计工作时间、通讯状态和转换器模块编号等信息。
5 自整角机信号处理系统电源电路设计
本系统设计输入是粗精两个通道模拟信号,按照模数转换原理,将转换后的数字信号传送至PLC 进行控制,并在信号处理系统中设计显示电路,用于显示自整角机转换后的数据,判断自整角机的接线转换是否正确。
5.1 电源设计
本系统自整角机和信号转换器电源电路采用分布式设计,外部电源提供交流220V,各个信号转换器模块需要的电源(24VDC)均通过AC-DC 电源模块自己产生,系统所需要的励磁电源由DC-AC 模块转换成交流115V,400Hz供自整角机和信号转换器励磁使用。
5.2 自整角机信号转换器电路
自整角机信号转换器电路按照模块管脚定义,连接相应信号(如图5 所示)。
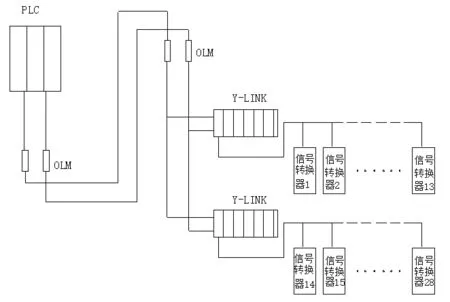
图5 自整角机信号转换器站点设置图Fig.5 Setting diagram of the signal converter station for the synchro
5.3 励磁电源设计
由于燃料操作监控系统采用直流共母线的驱动电源形式,取消了换料单机控制柜,所以自整角机转换器也采用集中控制方式,全部安装在同一控制柜内,使用统一的励磁电源供电,采用这种方式可以提高供电效率及可靠性。
6 自整角机信号传输系统设计
6.1 接口通讯
在燃料操作监控系统中,冗余PLC 与上位组态系统之间通过冗余的工业以太网进行通讯,冗余PLC 与现场传感器及控制器通过冗余的PROFIBUS DP 网络进行通讯,而对于不支持冗余网络接口的设备通过Y-LINK 转换为单链路的DP 总线后,再连接相应设备。自整角机信号转换器输出接口采用RS485 或PROFIBUS-DP 接口,可以直接与燃料操作监控系统相连,通过DP 单总线与Y-LINK 通讯,转换为双总线上传至PLC,可实现信号转换器数据的可靠上传。
6.2 信号转换模块站点设置
在燃料操作监控系统中,换料设备约需数字转换模块28 套,由于Y-LINK 的寄存器字节数必须符合244 字节入/244 字节出的限制,也就是地址范围最大244 字节,一个站点转换模块占用12 字节。为满足Y-LINK 地址范围要求,本方案中设计两个Y-LINK 模块连接28 个信号转换器模块站点(如图5 所示)。OLM 模块是现场总线光纤中继器,支持Profibus-DP 总线,独立双总线接口,为冗余双网系统提供安全高效的光纤冗余长距离传输及中继功能。
6.3 Profibus-DP协议现场总线通讯
Profibus-DP 是为换料控制设备中分散的I/O 设备和现场设备所需要的高速数据通信设计的,物理传输介质可以是双绞线、光纤、无线传输。通讯是基于主从原理,DP 从站被DP 主站按轮询表依次访问。Profibus-DP 系统通信中的响应方自整角机信号转换器,不能主动发送数据请求。
6.4 输出信号处理
自整角机信号转换器将自整角机的模拟位置信号变换为数字信号输出至PLC 进行定位控制。在换料设备运行过程中,自整角机信号转换器输出的二进制编码数字信号可能会出现信号跳变,跳变值如果超出了行程范围,则PLC误认为行程到位而停止运行。针对这个问题,在PLC 程序设计过程中,加入脉冲宽度调制指令(PWM)来处理自整角机信号转换器输出的数字信号。
指令语句[1]:

n1:脉冲ON 时间
n2:脉冲周期
D:脉冲输出的软元件
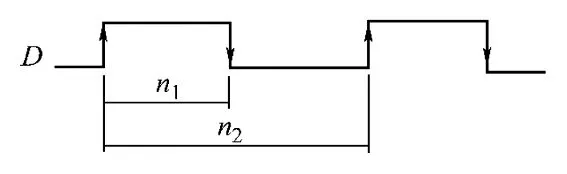
程序执行过程:在脉冲D 的上升过程中,PLC 采集自整角机信号转换器输出的数字信号并存储一次;经过n1 时间,在脉冲D 的下降过程中,PLC 再采集自整角机信号转换器输出的数字信号并存储一次。通过比较两次采集的数据。如果两次采集的数据相等,则作为正确自整角机位置指示值进入PLC 控制程序。在PLC 程序中,增加了PWM指令,则改善了PLC 接收自整角机信号转换器数字位置信号稳定性。
7 结束语
自整角机信号处理系统方案设计从最初的换料设备位置指示的调研,信号转换器的设计、信号转换器控制柜设计到数据传输系统设计和处理,充分考虑了燃料操作监控系统中换料设备的运行特点、功能需求和精度要求,各方面均达到了系统设计要求。本系统方案的设计为下一步信号转换模块、信号转换控制柜和信号处理系统样机设计制造提供了理论依据和设计基础。
