基于北斗导航的搜救智能车设计
2023-06-17李德英曾佳林邹凌峰
李德英,曾佳林,陈 盼,邹凌峰
(湖南信息学院 电子科学与工程学院,湖南 长沙 410151)
0 引 言
自然灾害因具有突发性高、破坏性强、二次灾害等特点,给人民群众的生命安全带来极大威胁。由于灾后环境变化多样、地形崎岖复杂以及人为不可控性因素,灾后的快速救援就显得尤为重要。
本设计是为灾后救援所需研发的一款搜救智能车,它具有体积小、灵活性强、数据传输快、性能稳定等特点,可以在废墟中自由行进,能快速、高效地搜索幸存者。此外,智能车还搭载有传感器模块和北斗定位系统,能实现对有毒气体浓度、温湿度的检测和帮助搜救人员根据智能车的位置快速展开救援,有效解决了灾后救援不及时带来的问题。
1 功能模块搭建+MCU 核心控制介绍
1.1 功能模块搭建
采用北斗导航定位技术接收智能机器人位置状况,通过2.4G 模块+FPGA 图像采集将信息送至MCU 数据中心。通过这一技术可以远程采集、实时监控被困人员身边的环境、状态情况,为快速安全的救援工作提供保障。
(1)监控功能
系统运用了FPGA 图像采集端+MCU 数据中心+OLED数据显示终端,搭建视频网络传输平台。协议处理模块的硬件平台以MPC860 为核心,结合嵌入式系统开发,实现实时视频的网络传输。用户可实时获取数据中心处理的信息,可靠性高、通用性强。
(2)北斗定位功能
北斗定位导航技术可实现双向报文通信,通信数据主要为汉字和代码两种形式,可实时显示经纬度以及海拔高度信息。由于我国地域广阔、地形复杂,北斗定位导航技术可以发挥其优势,精准定位。基于北斗卫星导航系统的设计,更加精准的定位车能确保行进的路线准确,让搜救人员快速发现遇难者。
(3)太阳能充电功能
本款智能车采用了太阳能充电技术,是绿色环保、无污染、可持续发展的新能源产品,拥有智能调节功能,可以调节不同的输出电压及电流,可提供在室外长时间工作,当光照度到达检测程度便可进行充电。太阳能获得电力,绿色、环保,不受资源分布地域的限制。
(4)5G 技术
北斗+5G 的结合使智能车能很好地进行搜救。因为车辆可以通过远程遥控规划路线,道路避障。
(5)空气温湿度和气体浓度检测
本款智能车可以实现7×24 小时全天候检测,温湿度提示,对灾难发生后泄露的有害气体激增的突发状况能及时报警反馈。
1.2 MCU 核心控制
STM32F103ZET6 具有72 MHz CPU 的速度和高达1 MB 的闪存,包含电动机控制外围设备以及CAN 和USB全速接口。STM32 系列ARM 拥有用途多的内核,同时还可以提供很多引脚接口与各模块的工作需要,开发工具比较齐全,开发资料也比较丰富。此外STM32 扩展性好、能搭载所需外设,在功耗方面控制得比较好,实时性比较强,对各种流行的嵌入式操作系统,支持度比较好。
2 智能车上下位机原理图及功能
2.1 上位机原理图
上位机通过按键和摇杆语音控制,经STM32MCU 进行数据采集和分析,通过OLED 显示,使用5G 无线通信将FPGA 采集图像进行处理,输入给RGB 显示屏显示。上位机原理图如图1所示。
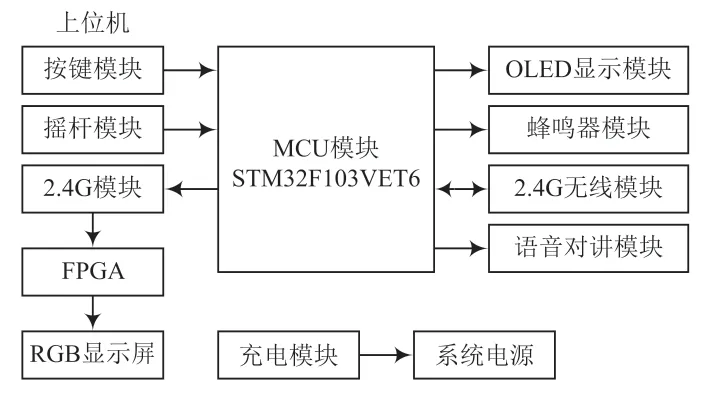
图1 上位机原理图
2.2 下位机原理图
设置可变可调PWM 波形脉冲宽度供给伺服电机控制电机运转,采集GPS/北斗双模块定位解码数据,使用串口触摸屏显示经纬度信息。下位机原理图如图2所示。
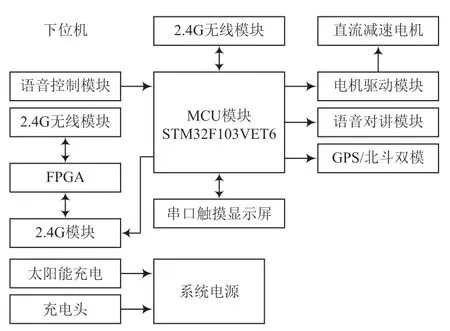
图2 下位机原理图
2.3 MCU 模块功能
(1)MUC 模块能通过采集信息计算超声波距离,发送不同PWM 可变脉冲电压控制电机。
(2)蜂鸣器电路负责报警工作,单片机发送电平就响,否则不响。
(3)数码管负责显示小车跟障碍物的距离。
(4)电源模块负责给元器件供电。
(5)温湿度以及环境空气质量检测。
(6)显示屏实现图像数据传输、空气质量显示。
(7)太阳能充电板实现光照环境下为各个功能模块充电续航。
3 PID 控制算法的实现
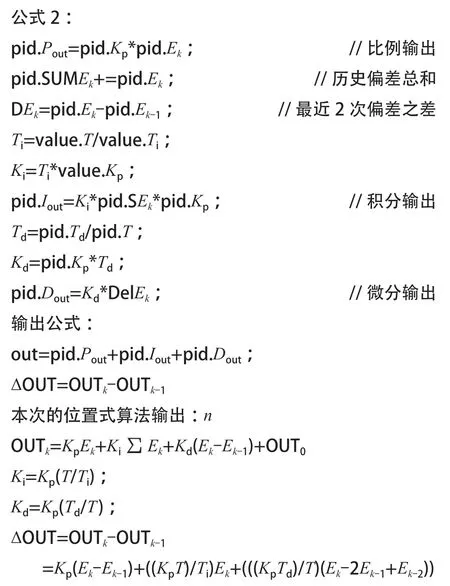
式中:Ek为本次的偏差;Ek-1为上次的偏差;Ek-2为上上次的偏差;Kp为算法增益调节;Ti为积分时间;Td为微分时间常数。
Dk能够说明从上次采样到当前采样的这段时间被控制对象的状态变化趋势,这种变化的趋势很可能会在一定程度上延续到下一个采样时间点。根据这个变化趋势(Dk的值)对输出信号OUT 进行调整,达到提前控制的目的。图3为Dk变量控制图。
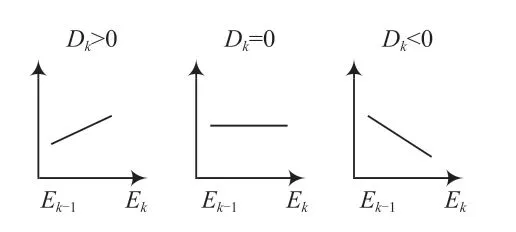
图3 Dk 变量控制图
4 智能车图像采集FPGA 控制系统实现
4.1 CPU 型号
CPU 型号如图4所示。
图4 FPGA 芯片型号
4.2 数据管理
(1)智能管理
智能管理功能分为用户管理、报警设置。用户可点击界面菜单栏的“传输设置”按钮,通过该功能对数据传输的相应参数进行设置。智能管理界面如图5所示。

图5 智能管理界面
(2)录像查询
用户可以通过该功能对录像的相应数据进行查询。点击界面菜单栏“抓拍管理”按钮,用户可对抓拍图片进行相应参数的管理操作。抓拍录像查询界面如图6所示。

图6 抓拍录像查询界面
5 产品图及系统环境应用介绍
5.1 产品图
产品实物图如图7所示。

图7 产品实物图
5.2 系统环境应用介绍
场景实现:这款智能车设计为了协助救灾远程探测灾区身边的环境温湿度,以及位置情况和查看受困人在狭小空间的情况,一旦有害气体浓度超标,可及时报警。为了更好地协助搜救人员救援,智能车还搭载有人机交互界面,可实现救援人员与被困人员的及时交流,以便更好地展开救援,同时本款产品配备有太阳能充电续航技术,可语音唤醒打开照明灯,在夜晚也能实施救援任务,是一款多功能型搜救智能车。
6 结 语
随着科学技术的不断发展,在搜救机器人这一领域的发展这些年来也取得了许多的进步,但是用于在实际中参加救援行动的并不多,只有少部分得到了应用,大多数仍然处在实验室研究的阶段。但是随着科技的进步和社会的发展,未来搜救机器人一定会迅猛发展,所以应用前景是非常广阔的,势必会引起一场工业科技革命。
注:本文通讯作者为李德英。
