鸿鹄机器人辅助全膝关节置换术学习曲线初步研究
2023-06-15智信平航宇彭伟倪明李想李海峰余方圆张国强柴伟
智信,平航宇,彭伟,倪明,李想,李海峰,余方圆,张国强,柴伟
对于终末期膝骨关节炎,全膝关节置换术(total knee arthroplasty,TKA)是最有效的治疗方法。由于众多因素影响,TKA 的满意率约为80%[1-2]。研究表明,影响TKA 术后患者满意度的重要因素包括假体位置和下肢力线的精准度[3-4]。目前市面上有众多的机器人用于辅助行TKA,包括MAKO 机器人、ROSA机器人、鸿鹄机器人等[5-7]。夏润之等[8]评估了鸿鹄机器人的早期临床效果,表明鸿鹄机器人有良好的截骨精准性和稳定性,有望在将来的临床使用中辅助关节外科医师实现更好的术中截骨和术后力线重建效果。
鸿鹄机器人的注册精准度、截骨精准度、假体术前规划准确性等均与术者的学习曲线相关。国外文献报道,随着机器人辅助髋关节置换与膝关节置换手术例数的增加,术者会越来越熟练,在注册精准度、截骨精准度等方面均有良好的成长性[9-11]。目前缺乏关于鸿鹄机器人辅助TKA 学习曲线的数据。因此,本研究致力于探究骨科医师行鸿鹄机器人辅助TKA 的学习曲线,包括手术时间、术中各个步骤所用时间、与传统手术时间比较、假体术前规划准确性等。
1 资料与方法
1.1 一般资料
2022年1月至4月在解放军总医院第四医学中心进行鸿鹄机器人随机对照临床研究。共设置30例鸿鹄机器人辅助TKA及30例传统TKA。所有患者均采用微创公司提供的内轴膝假体。本研究共统计50例患者手术数据,由于人员数量限制等因素未能统计剩余10例患者数据。该临床研究设置了准确、可行的纳入及排除标准,所以在统计数据时未设置额外的排除标准。纳入标准:①受试者为行初次TKA 的患者;②年龄18~85周岁。排除标准:①存在下肢力线大于20°畸形的患者;②体重指数>35 kg/m2的肥胖患者;③患肢短缩大于3 cm 者;④手术部位具有手术史者;⑤具有外翻膝畸形患者;⑥在过去6个月内曾接受对侧膝关节手术者;⑦对侧膝关节已纳入本研究的患者;⑧患侧膝关节存在之前植入的人工膝关节者;⑨患有活动性感染患者;⑩患有可能影响步态或负重的严重神经系统或肌肉骨骼疾病,如肌萎缩症、多发性硬化、脑梗死、偏瘫、夏科氏关节病患者。
本研究共纳入7位高级职称医师,共50例患者行TKA。每位术者的平均年手术量根据其前两年TKA数量估算。其中鸿鹄机器人辅助TKA 28 例,患者年龄51~75岁,平均(65.5±5.8)岁,女性占比71%,男性占比29%,左右侧占比分别为43%和57%。传统TKA组共22 例,患者年龄58~74 岁,平均(65.2±5.9)岁,女性占比77%,男性占比23%,左右侧占比分别为68%和32%。7位术者行TKA手术例数及主刀年资如表1所示。根据2020—2021两年间术者TKA例数估算平均年手术量,4位术者手术量为高,3位术者为中(表1)。

表1 术者信息
本研究通过中国人民解放军总医院伦理委员会审批(2021KY030-HS001),患者均签署知情同意书。
1.2 手术技术及术中记录项目
1.2.1 鸿鹄机器人辅助TKA
手术开始时,首先由助手安装腿架,用于术中完全固定下肢。随后安装股骨和胫骨定位架,通过其上反光贴在手术中实时跟踪下肢位置。通过粗探针注册内外踝并切开膝关节正中切口后,通过细探针注册股骨及胫骨表面定位点,用于与CT 图像进行匹配。根据股骨和胫骨大小选择合适的假体大小及假体摆位。此时,假体摆位遵循的原则为测量截骨法,根据假体参数,制定截骨厚度,术者可根据自身习惯,调节假体大小。由于此前有其他机器人操作经验,所以在本项目中,7 位术者均采用平衡间隙法。术者可在伸直位时尽力沿下肢方向,牵开胫骨,使伸直间隙最大;在屈曲90°时,抬高股骨,使屈曲间隙最大。并根据间隙大小,调节胫骨假体内翻、股骨假体内翻、股骨假体外旋、胫骨假体后倾等参数,使间隙调整到术者认为的合适数值。调整参数完毕后,机器人机械臂自动将截骨导板移动至规划位置,术者使用单独的摆锯通过截骨导板进行股骨胫骨6个面的截骨,随后平衡软组织、放置试模测试、骨水泥固定假体、缝合(图1)。术中详细记录手术总时间、各个步骤时间、术中特殊情况等。

图1 鸿鹄机器人辅助TKA
1.2.2 传统TKA
手术操作按传统TKA 操作进行,包括切皮,显露,利用截骨板进行股骨、胫骨截骨,安装骨水泥假体,缝合。术中使用假体为微创内轴膝假体,器械由微创公司提供。
1.3 评价指标
术中记录总手术时间、脚架安装时间、参考架安装时间、骨注册时间、注册红点数量、截骨时间、截骨后软组织平衡时间、安装试模时间、假体植入时间。对比鸿鹄机器人辅助TKA 总时间与传统TKA 总时间,初始与末尾鸿鹄机器人辅助TKA中各步骤时间,鸿鹄机器人假体大小术前规划准确性。本研究术前规划完全准确定义为股骨假体规划、胫骨假体规划均正确。
1.4 统计学方法
采用SPSS 21.0软件进行统计学分析。计量资料先进行正态分布检验,符合正态分布,以均数±标准差表示,采用两两比较t检验。累积求和分析法(cumulative summation,CUSUM)分析:定义CUSUM(1)=第1 例截骨时间OT(1)-截骨时间平均值OY(mean),CUSUM(n)=OT(n)-OT(mean)+CUSUM(n-1),一直计算到最后一例。手术例数序数为横坐标,时间的CUSUM 值为纵坐标,绘制曲线并进行曲线拟合。以P<0.05时判断曲线拟合成功,以R2判断拟合优度。以CUSUM拟合曲线的顶点作为跨越学习曲线所需累计的最低手术例数。涉及到的平均值计算、差值计算、累积和值计算均使用Microsoft office EXCEL 2019软件完成。做图及曲线拟合使用GraphPad Prism 8.0软件。以P<0.05为差异有统计学意义。
2 结果
2.1 鸿鹄机器人辅助TKA 与传统TKA 手术时间比较
鸿鹄机器人辅助TKA和传统TKA总手术时间分别为(123.4±22.0)min和(103.6±23.0)min,两组差异有统计学意义(P=0.003)。鸿鹄机器人辅助TKA 平均总手术时间增加约20 min。单一术者传统TKA 总手术时间均比鸿鹄机器人辅助TKA 低,但差异均没有统计学意义(P>0.05)。术者2 的鸿鹄机器人辅助TKA 时间最短,为(110.4±8.6)min。根据每位术者手术例数,对术者1~4的两种手术时间变化趋势进行了分析(图2)。术者1 完成13 例患者鸿鹄机器人辅助TKA,手术时间从第7 例开始呈下降趋势,第10 例患者鸿鹄机器人辅助TKA手术时间短于传统TKA。计算术者1 鸿鹄机器人辅助TKA 时间,并进行曲线拟合,术者1拟合方程为:y=-2.91x2+39.65x-53.09,最高点为第7例,渡过最高点后手术时间持续下降(图3)。术者2手术时间总体趋于稳定,在完成5例的学习曲线中未出现较大波动。术者3与术者4的鸿鹄机器人辅助TKA 和传统TKA 手术时间均处于波动状态,需更多例数的数据进行观察。

图2 术者1~4鸿鹄机器人辅助TKA和传统TKA总手术时间变化趋势
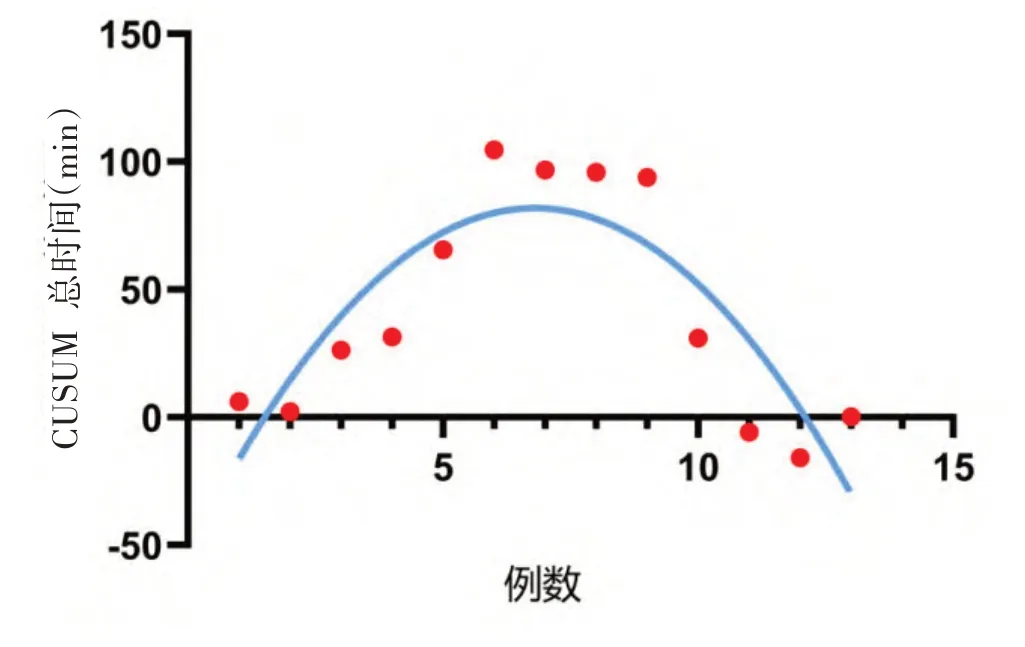
图3 术者1鸿鹄机器人辅助TKA时间CUSUM曲线
2.2 鸿鹄机器人辅助TKA手术时间
统计术者1 和术者2 的鸿鹄机器人辅助TKA 手术时间,并比较其初始平均手术时间和末尾平均手术时间(表2)。术者1初始6例平均手术时间与末尾6例平均手术时间差异有统计学意义(P<0.05)。术者2初始2例平均手术时间与末尾2例平均手术时间差异无统计学意义(P>0.05),符合术者2的5例鸿鹄机器人辅助TKA 手术时间趋势。统计7 位术者共完成的28例患者手术时间,初始14例平均手术时间与末尾14例平均手术时间差异无统计学意义(P>0.05)。
表2 术者1和2的鸿鹄机器人辅助TKA手术时间(,min)

表2 术者1和2的鸿鹄机器人辅助TKA手术时间(,min)
注:△表示前6例与后6例的比较,▲表示前2例与后2例的比较,○表示前14例与后14例的比较。
2.3 鸿鹄机器人辅助TKA术中各步骤时间
由于术者1的手术时间有下降趋势,初始及末尾手术时间差异有统计学意义,所以分别统计其脚架安装、参考架安装、骨注册、注册红点数量、截骨、截骨后软组织平衡、安装试模、假体植入步骤的时间,以探究术者1 在哪一步骤出现了显著的变化(表3)。比较初始6 例和末尾6 例的单独步骤时间,末尾平均参考架安装时间反而高于初始平均时间(P<0.05)。其余步骤差异均无统计学意义(P>0.05)。但截骨步骤的时间有所下降,骨注册时间趋于稳定,无显著变化。计算截骨时间CUSUM 值,并进行曲线拟合,拟合方程为:y=-0.69x2+10.42x-14.51,其临界值为第7例,此后截骨时间持续下降(图4A)。因此,术者1 手术时间的缩短可能得益于截骨步骤的熟练操作。计算截骨后软组织平衡时间CUSUM 值,并进行曲线拟合,拟合方程为:y=-0.57x2+7.62x-11.93,其临界值为第7例,此后时间持续下降(图4B)。

图4 术者1鸿鹄机器人辅助TKA截骨时间(A)及截骨后软组织平衡时间(B)CUSUM曲线
表3 术者1鸿鹄机器人辅助TKA各步骤时间(n=13,,min)

表3 术者1鸿鹄机器人辅助TKA各步骤时间(n=13,,min)
2.4 假体精准性
为进一步明确7位术者使用鸿鹄机器人在术前假体规划方面的精准性,本研究比较了术前规划的假体大小及术中实际使用的假体大小。7位术者假体使用完全准确的比例分别为75%、40%、66%、50%、50%、100%、100%。比较初始和末尾安装准确度,术者1、3、4、5有显著的提升。总体28例中,比较前13例和后13例发现,术前规划精准度由38%提升到85%(表4,术者7鸿鹄机器人辅助TKA 只有1例,无法区分初始和末尾,所以未在表中予以体现)。可以观察到通过一定例数的学习,6位术者术前规划准确度均有所提升。

表4 鸿鹄机器人辅助TKA假体计划准确性
2.5 鸿鹄机器人辅助TKA操作意外事件
在骨注册方面,术者1和4均有1例注册两次,其余术者均一次完成注册。术者6 有1 例患者机器人完成骨注册后截骨时屏上显示错误,股骨形态倒转,最终术者放弃使用机器人,使用传统工具完成后续手术,后续原因分析可能与股骨定位钉在手术过程中移位有关。术者1 有1 例平衡截骨后的软组织花费了40 min,影响了整体手术时间。
3 讨论
本研究探讨了中国人民解放军总医院第四医学中心7位术者行鸿鹄机器人辅助TKA的学习曲线,并与传统TKA 的手术时间进行了比较。本研究可为后续使用鸿鹄机器人行TKA 提供经验,包括各步骤时间及其学习曲线,手术中有可能发生的意外事件等。
鸿鹄机器人辅助TKA平均手术时间比传统TKA多约20 min。这可能与机器人手术有额外的脚架安装、参考架安装、骨注册等步骤有关。并且与国外报道的MAKO 机器人等的学习曲线类似[12-15],说明手术机器人延长手术时间是普遍存在的。此外,Vermue等[11]的研究表明,随着手术例数的增加,MAKO 机器人辅助TKA 总手术时间显著降低,最后10 例平均手术时间趋于传统TKA,两者间差异无统计学意义。本研究中,术者1通过6例的鸿鹄机器人辅助手术后,总手术时间有显著降低,这与目前文献报道的结果相吻合。但术者2的数据显示,机器人辅助TKA手术时间趋于平稳,且比传统TKA平均手术时间仅多10 min。这可能与术者2 在前期实施过大量的MAKO 机器人辅助TKA 与全髋关节置换术,在机器人辅助TKA 方面有较多经验,可以在早期稳定地、更快地完成骨注册、截骨等步骤。研究报道,国外医师进行MAKO 辅助TKA的手术时间下降拐点出现在7例左右,与本研究中鸿鹄机器人辅助TKA的学习曲线类似[11,16-19]。
术者1 实施鸿鹄机器人辅助TKA 的各步骤时间显示,随着手术例数的增加,在截骨和截骨后软组织调整方面有所降低。术者1的骨注册时间没有显著的变化。研究表明,国外医师的手术时间缩短主要取决于骨注册时间。渡过7例学习曲线之后,国外医师的骨注册时间有了明显的加快,从而降低了手术时间[16]。这可能与术者1之前接触过相同模式的骨注册过程有关,如MAKO髋膝关节置换机器人的骨注册方式。而之前熟悉的MAKO 机器人的截骨方式与鸿鹄机器人的截骨方式不同,所以并未对掌握鸿鹄机器人截骨方式提供过多的帮助。此外观察到脚架安装及参考架安装时间有较大波动,这可能与每一台的助手及器械护士不固定有关,当新的助手及器械护士配合术者进行此类工作时,时间可能有所延长,并不与手术例数的先后紧密相关[20]。该数据提示,手术中应尽可能配备固定的助手及器械护士,以便缩短总手术时间。
在术前规划方面,6 位术者假体选择准确度有了显著的提高。在不熟悉机器人操作时,前期的假体准确率较低。原始数据表明,大部分情况为衬垫厚度与术前规划不匹配。后续熟悉机器人截骨操作后,准确率有所提升。国外MAKO 机器人相关研究表明,规划时的假体准确度较低,与术前规划由MAKO 公司工程师完成有关,术者在术前并没有进行个性化的评估与调整[16,21-22]。在本研究中,工程师仅完成CT 上的骨骼分割工作,最终假体摆位及角度调整均由术者完成,并在术中截骨前有二次调整,所以当术者熟悉该机器人与假体后,假体规划准确度有了大幅提升,相信随着机器人辅助手术例数的增加,术前规划准确度最终会趋于100%。上述结果表明,鸿鹄机器人辅助TKA 时,建议术者自行完成个性化假体选择与调整,不能仅依赖工程师。
本研究中出现的重新骨注册及术者6 截骨失败的问题均可能与股骨及胫骨定位架的移位有关,未观察到其他机器人相关问题。所以,在后续进行鸿鹄机器人辅助TKA 过程中,应保证股骨及胫骨定位架的稳定性,避免触碰等。
本研究具有一定的局限性:①本研究共28 例鸿鹄机器人辅助TKA,分散于7 位术者中,每个主刀医师的入组患者均为主刀医师自行招募,且采取随机入组方案,所以存在不同医师之间分布,不同组别之间分布有较大差异的情况,所以有些术者的手术例数较低,未能对这些术者总结出普适性规律;②由于本项临床研究除了统一主刀医师,未固定每一个跟台医师,所以在参考架安装、试模安装等步骤时间有较大波动,从而导致了整体手术时间的上升,在研究手术时间趋势时,有一定的干扰;③7 位术者在本临床研究之前接触其他机器人程度不一,有的之前接触过其他机器人系统,如MAKO 机器人、元化机器人等,会更容易熟悉鸿鹄机器人。
4 结论
每位术者均可通过一定例数的学习,熟练掌握鸿鹄机器人辅助TKA。经过对鸿鹄机器人操作的熟悉,手术时间显著降低,其学习曲线临界值在第7例。其中截骨操作时间显著缩短,其学习曲线临界值在第7 例。这与术者先前接触过其他类型手术机器人经验也相关。
【利益冲突】所有作者均声明不存在利益冲突
