国产全流程辅助髋关节置换机器人假体定位精准性研究
2023-06-15王文哲李涛张子安刘一楷路鑫哲李晨恺张海宁
王文哲,李涛,张子安,刘一楷,路鑫哲,李晨恺,张海宁
全髋关节置换术(total hip arthroplasty,THA)是治疗终末期髋关节疾病有效的手术方式。近年来,随着髋关节置换技术日益成熟及人口老龄化的发展,我国髋关节置换手术量大幅增加,进入快速增长阶段[1]。假体位置不良与术后多种并发症的发生及假体生存率密切相关[2-4]。许多研究发现,在传统的THA 手术方式中假体位置不良发生率较高[5-6]。为提高THA 手术假体植入位置精准度,髋关节手术机器人技术应运而生。目前国际上已经有数款手术机器人应用于髋关节置换领域,并且已经有多项研究证明了机器人辅助技术在假体定位、恢复正常生理结构等方面的优势[7-9]。但目前所有应用于临床的手术机器人只直接参与髋臼侧的手术操作,虽部分机器人可辅助手术者确定股骨颈截骨线,或进行假体植入后验证下肢长度差异(leg length discrepancy,LLD)及假体位置等,但仍无法参与股骨侧手术操作,股骨侧的操作依然需要手术者使用常规手术方式,这意味着机械臂难以提高股骨假体定位精准度。然而,股骨假体位置同样与THA 术后并发症的发生及假体生存率有着密切联系[3-4,10-12]。
本研究使用的国产手术机器人可覆盖THA 手术中全部操作步骤,即在术中不改变患者体位及机械臂位置的情况下,可以直接参与髋臼侧和股骨侧的操作。本研究的目的是研究该手术机器人在THA 中假体定位的精准性。
1 资料与方法
1.1 一般资料
回顾性分析2021 年3 月至12 月于青岛大学附属医院行国产全流程手术机器人骨科关节手术导航系统(上海龙慧医疗科技有限公司,型号规格:TRex-RS,系统软件版本:HIP 1.0,以下简称“Longwell 机器人”)辅助下THA患者35例。
纳入标准:①可查询到完整的术前规划、术后影像学及病历等资料;②知情并同意加入该回顾性研究。排除标准:因机器人因素以外的其他各种因素导致机器人辅助手术未能顺利进行者。
经上述纳入与排除标准筛查,35 例患者全部纳入本研究,其中男18例,女17例;年龄33~72岁,平均(57.2±9.6)岁;股骨头缺血性坏死22 例,先天性髋关节发育不良11 例,骨关节炎1 例,股骨颈骨折内固定术后不愈合1 例;体重指数18.9~31.7 kg/m2,平均(25.4±3.4)kg/m2。根据Dorr 髓腔分型标准,35 例患者中,A、B、C型髓腔分别有1例、31例、3例。
本研究已通过青岛大学附属医院伦理委员会审批(QYFY WZLL 27194),并豁免患者知情同意书。
1.2 手术方法
所有手术由我院两位经验丰富的术者进行。术前行下肢CT三维成像,并以此为基础通过机器人系统软件进行术前规划,确定假体位置及相关参数。术中患者采用全身麻醉联合神经阻滞,取侧卧位进行手术。机械臂配准后,将两根定位针固定于髂嵴,连接导航红外反射球。通过改良的Hardinge 入路暴露髋关节。在大转子的外侧前方固定一枚标记螺钉,安装股骨侧导航红外反射球。股骨侧进行粗配准和精配准,然后利用机械臂连接的摆锯按照术前规划位置和角度进行股骨颈截骨(图1A)。显露髋臼,进行髋臼内及周缘选点的粗配准和精配准,并借助机械臂连接的髋臼锉,按照规划的角度、深度及磨锉尺寸对髋臼进行磨锉。安装试模测试参数合适后,将髋臼杯连接至机械臂工作终端,在机械臂辅助下将髋臼杯击打植入到规划位置。根据初始稳定性,可选择2~3枚髋臼螺钉辅助固定髋臼杯。之后显露股骨近端,利用连接在机械臂上的开口器,在机械臂辅助下完成髓腔开口,继而分别利用机械臂连接的髓腔远端锉、近端锉分别进行股骨髓腔制备(图1B),将股骨柄试模连接于机械臂上,植入髓腔,安放股骨头试模复位,此时术中假体位置及角度等数据会实时显示在屏幕上,测试关节稳定性、LLD 及假体规划位置,满意后去除试模,将股骨假体连接至机械臂工作终端,利用机械臂将股骨柄假体敲击植入至术前规划位置。再次进行测试。完成假体植入过程。

图1 Longwell机器人辅助THA术中操作
1.3 数据收集
收集术前规划的股骨偏心距(femoral offset,FO),旋转中心(corner of rotation,COR)的位置,LLD,髋臼杯前倾角、外展角,股骨前倾角,及术后在影像学资料上测量的实际假体数据。测量方法如图2所示。术后实际测量数据较术前规划的偏差以平均绝对差值表示,准确度以均方根误差(root mean square error,RMSE)表示,精度以标准差(standard deviation,SD)表示。各测量项目“结果准确”定义为[8,13-14]:与术前规划相比,术后测量的实际FO偏差≤5 mm;LLD偏差≤5 mm;COR 在水平、竖直位置上偏差≤3 mm,髋臼前倾角偏差≤5°;髋臼外展角偏差≤5°;股骨前倾角偏差≤5°;股骨柄在冠状面成角偏差≤3°。
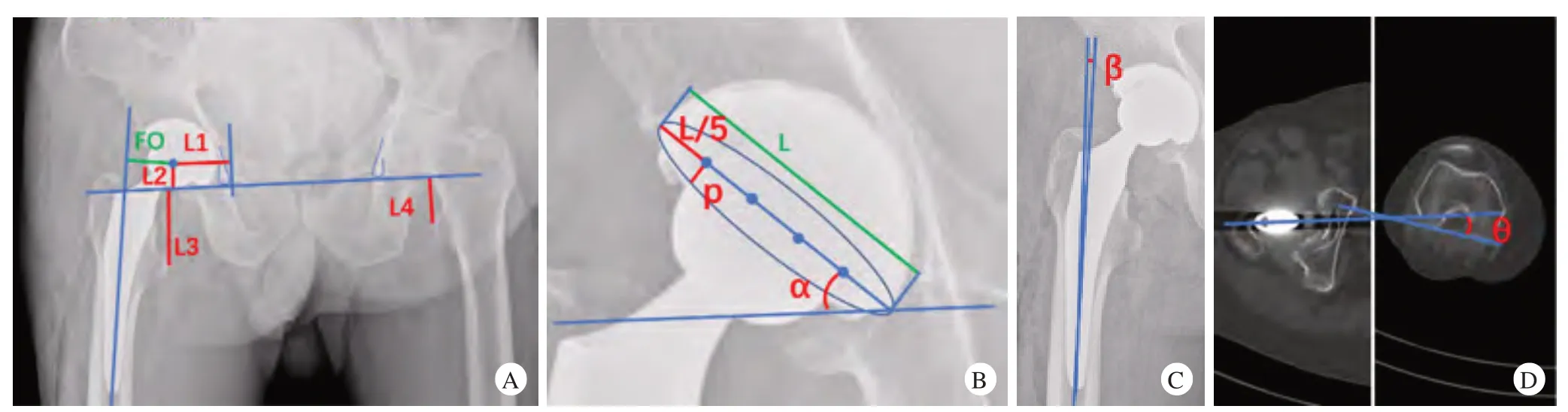
图2 FO、COR在水平及竖直方向的位置、LLD、髋臼杯前倾角及外展角、股骨柄冠状面成角及股骨前倾角等数据的测量方法
1.4 统计学方法
采用SPSS 24.0软件进行统计学分析。连续变量以均数±标准差表示,分类变量用频数和百分比表示。术后实际测量数据较术前规划的偏差以平均绝对差值表示,准确度以均方根误差(root mean square error,RMSE)表示,精度以标准差(standard deviation,SD)表示。采用Pearson相关性分析检验各数据术后实际测量值与术前规划值的相关性,相关系数以r表示。r≥0.8 时,为两变量间高度相关;0.5≤r<0.8,为两变量中度相关;0.3≤r<0.5,为两变量低度相关;r<0.3,为两变量不相关。以P<0.05为差异有统计学意义。
2 结果
33 例患者使用史赛克Trident Ⅱ Tritanium 髋臼杯、Trident X3 10°内衬、Biolox delta V40 陶瓷股骨头、Accolad Ⅱ股骨柄;2 例患者使用史赛克Trident PSL 髋臼杯、Trident X3 10°内衬、Biolox delta V40 陶瓷股骨头、Accolad TMZF股骨柄。
术后通过影像学资料测量的实际参数较术前规划值的偏差见表1。与术前规划值比较,FO、COR 在水平方向及竖直方向的位置及LLD 的平均绝对差值分别为1.8 mm(SD 1.8 mm,RMSE 2.3 mm),1.8 mm(SD 1.4 mm,RMSE 2.1 mm),1.5 mm(SD 1.0 mm,RMSE 1.8 mm),3.4 mm(SD 3.5 mm,RMSE 4.1 mm)。髋臼外展角及前倾角、股骨前倾角、股骨柄在冠状面的夹角平均绝对差值分别为2.9°(SD 2.6°,RMSE 3.5°),2.6°(SD 2.1°,RMSE 3.3°),3.8°(SD 2.7°,RMSE 4.3°),1.1°(SD 1.0°,RMSE 1.5°)。35 例患者中各数据无明显偏差的频数(频率)分别为:FO 34 例(97.1%),COR 在水平方向的位置30 例(85.7%),COR 在竖直方向的位置32 例(91.4%),LLD 30 例(85.7%);髋臼外展角29 例(82.9%),髋臼前倾角30例(85.7%),股骨前倾角29例(82.9%),股骨柄冠状面成角34 例(97.1%)。FO(r=0.960)、COR 在水平方向(r=0.868)及竖直方向(r=0.987)位置的术后实际测量值与术前规划均高度相关,LLD(r=0.766)及股骨前倾角(r=0.775)的术后实际测量值与术前规划均中度相关(以上5 类资料的比较中,P<0.001)。髋臼前倾角及外展角、股骨柄冠状面成角的术前规划值不符合正态分布,无法进行相关性分析。典型病例见图3。
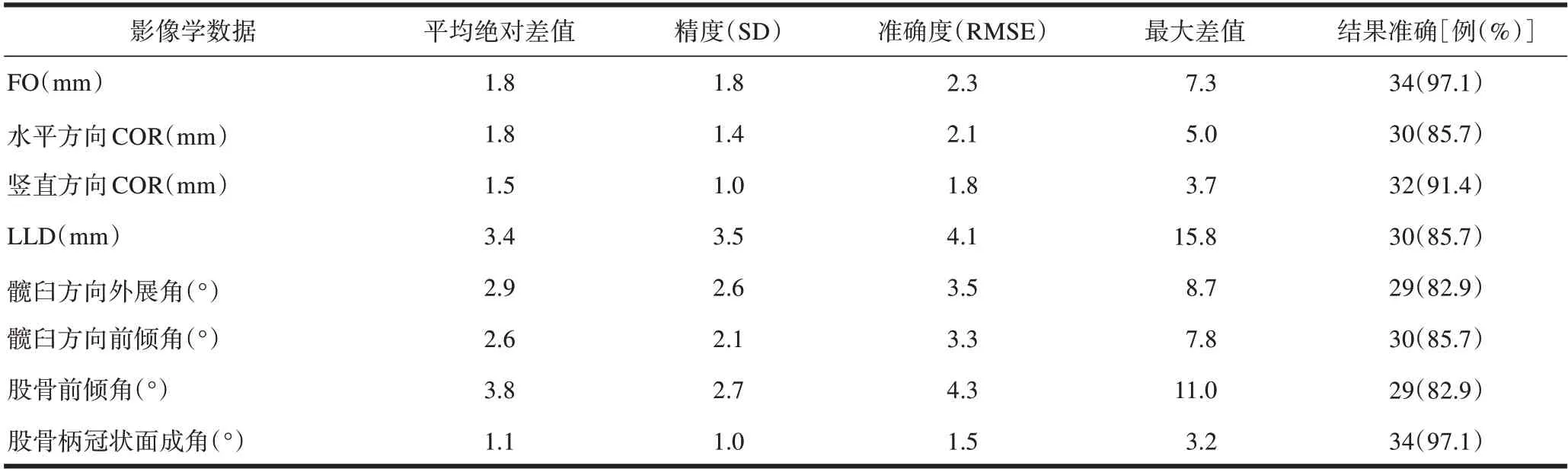
表1 术后测量的影像学数据与术前计划的比较(n=35)
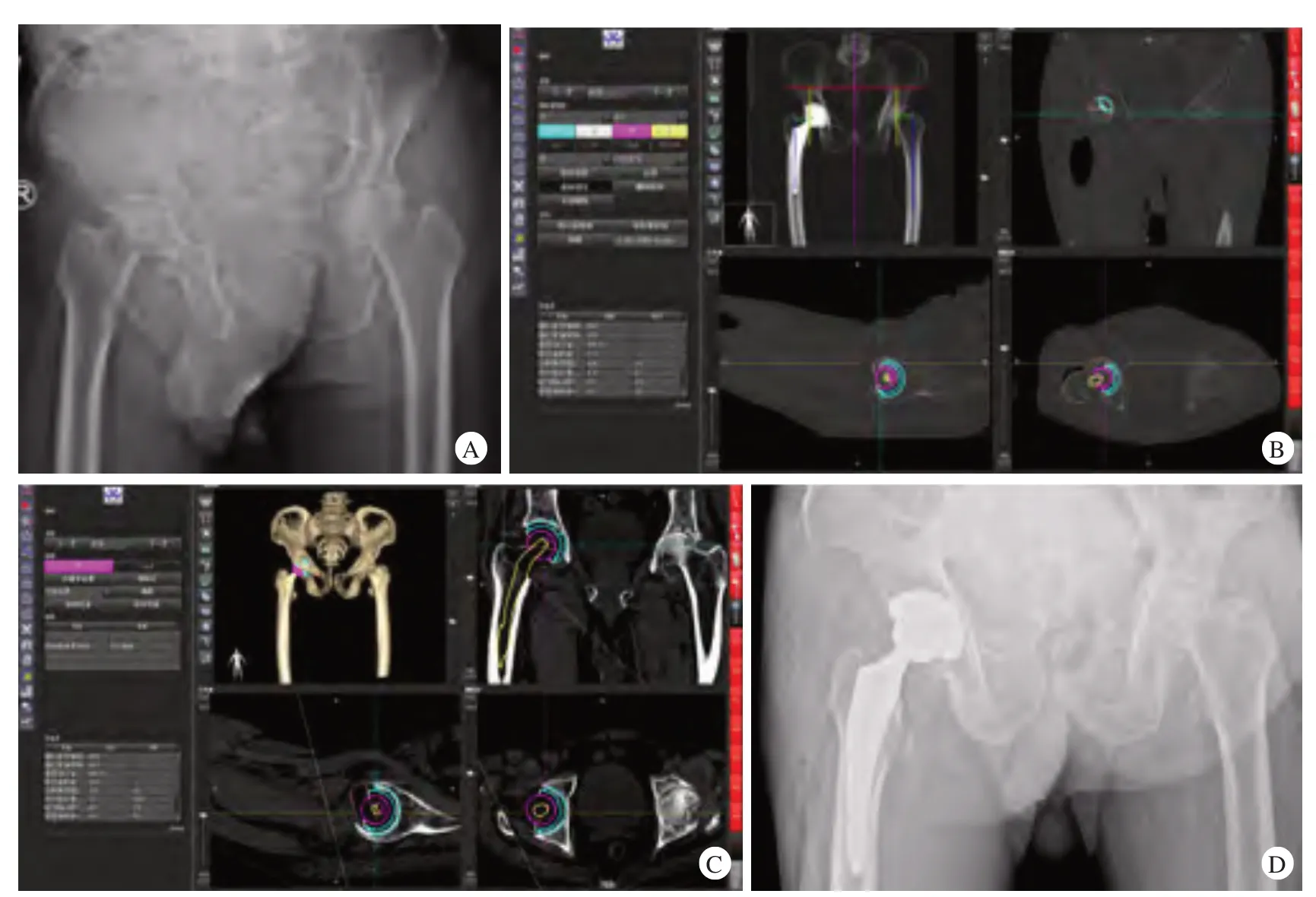
图3 患者,男,49岁,诊断为双侧股骨头缺血性坏死,右侧行机器人辅助下THA
3 讨论
THA 是治疗终末期髋关节疾病的有效治疗方案。假体位置不佳引起的术后脱位、假体松动移位、撞击、下肢不等长等并发症的发生严重影响患者术后生活质量及假体生存率[2-4,10]。然而研究发现传统THA 手术假体位置不良发生率较高[5-6]。随着近年来我国THA 手术量增加,假体位置不良造成的不良后果日益凸显。为了提高手术精准度,机器人辅助手术技术应运而生,目前已有多款应用于THA 的手术机器人正在研发或已上市销售。
3.1 髋臼杯的方向
髋臼杯植入的方向即前倾角与外展角与术后脱位及撞击等并发症的发生有重要关系[15]。被广泛使用的髋臼方向的参考范围包括“Lewinnek安全区”(前倾角5°~25°,外展角30°~50°)和“Callanan安全区”(前倾角5°~25°,外展角30°~45°)。但传统THA 手术中髋臼杯定位的精确度较低[5]。目前已经有多个研究证明机器人辅助手术可以更准确的将髋臼杯植入到以上安全区域内[7,16]。但最近的部分文献对以上安全区域临床意义提出了质疑。Tezuka 等[17]发现,许多THA 术后脱位患者髋臼方向处在“Lewinnek安全区”内,他通过研究320 例髋关节置换患者后,质疑了“Lewinnek 安全区”的意义,并建议使用“髋关节功能安全区”,强调了骨盆和髋关节的运动对THA 术后脱位的影响。Tang 等[18]研究了100 例患者的髋臼方向、骨盆倾斜和骨盆的运动,最终发现并不存在通用于所有患者的髋臼方向安全区,并建议个性化设计髋臼植入方向。常规手术方式中,手术者难以实现精准化和个体化的髋臼植入,而机器人在以CT 为基础的术前规划环节,可以直观地考虑患者骨盆倾斜等因素,进行个性化术前规划。机器人的精准度是将个性化术前规划转化为个性化假体植入的关键。本研究机器人获得了良好的准确度和精度,并将超过80%的髋臼杯植入到了术前规划的理想方向。Hayashi等[8,14]的研究获得了相似的结果,机器人可将髋臼方向与术前规划的偏差控制在1.7°~1.9°(前倾角SD 1.9°~2.3°),1.8°~2.5°(外展角SD 2.0°~2.7°)。该研究发现髋臼植入精准度可能与手术入路、髋臼倾斜及髋关节发育不良等因素有关。Stewart 等[9]对机器人辅助直接前方入路THA 和术中透视指导的THA 假体位置进行了比较,未发现机器人在髋臼杯植入方向精准度方面的优势。在其研究中,术中机器人不明原因关机和假体植入不准确等原因造成的机器人手术失败率达8%,这在其他文献中较少见。因辐射、操作复杂和手术时间延长等原因,术中X射线透视并未广泛应用于THA。
3.2 股骨柄的位置
股骨假体位置对THA 术后临床效果同样重要。Leiss等[11]通过研究发现,股骨柄在冠状面上内翻或外翻3°以上将会增加假体松动下沉的风险。另外,股骨假体位置还与假体周围骨折、步态异常及下肢不等长有关[10,12]。Kim 等[6]通过对340 例THA患者的研究发现,将股骨假体前倾角放置在5°~25°的范围内可以有效减少术后撞击、不稳定或脱位等风险;同时,常规手术中股骨前倾角由于人为操作误差导致可重复性较低,有近30%病例无法将股骨前倾角放置在此合理范围内。Belzunce 等[3]也同样发现常规THA 手术中,股骨假体位置的变动范围是较大的,因此精确植入股骨假体是很重要的。当前所有已经应用于THA 的机器人仅可参与髋臼侧操作,股骨侧操作仅限于对股骨颈截骨线进行标记,其余步骤均为徒手操作,这使机械臂仅可覆盖半数THA 操作流程。以目前应用最为广泛的MAKO 机器人为例,术者可术前规划股骨假体型号,术中可通过“Enhanced Workflow”模式标记股骨颈截骨线,术者依旧需要通过常规手术方式进行股骨开口、髓腔制备及假体植入等环节,这将导致股骨假体植入位置变动较大,精确度较低[3,13]。
本研究使用Longwell THA 手术机器人可覆盖THA 全部流程,这意味着它不但可以参与髋臼侧的操作,还可以按照术前计划,直接参与股骨柄的植入过程。本研究的35例患者股骨前倾角较术前计划仅偏差3.8°(SD 2.7°,RMSE 4.3°),股骨柄在冠状面上成角与术前计划平均偏差1.1°(SD 1.0°,RMSE 1.5°),与术前规划的平均绝对差值在理想偏差范围内的概率分别达82.9%和97.1%。因此,使用全流程辅助机器人植入股骨柄可产生良好的精度及准确度。有文献认为髋臼与股骨的角度并非相互独立的,建议综合考虑髋臼前倾角与股骨前倾角,强调了联合前倾角对THA 术后髋关节稳定性的重要性[19]。因此仅能实现髋臼杯精准定位是不够的,全流程手术机器人可同时完成髋臼杯及股骨柄的精准定位,这意味其具有更加重要的作用。
3.3 COR的位置和FO
THA 术后正常的COR 位置和合理的FO 对减少髋关节术后并发症的发生、更好恢复髋关节功能、降低术后并发症、提高假体生存率有重要意义[20]。但传统手术方式中COR位置和FO的误差较大,COR偏差超过5 mm 比例达14%~42%,FO 偏差超过5 mm 比例达35%~46%[13]。本研究COR在水平方向和竖直方向上的偏差<3 mm 比例分别达85.7%及91.4%,FO 偏差<5 mm的比例达97.1%,并获得了良好的精准度。
Hayashi等[14]在一项包含69个病例的研究中测试了MAKO 手术机器人在THA 中的精确性。机器人在非髋关节发育不良组和髋关节发育不良组的患者中,放置假体的联合偏心距与术前计划的平均绝对差值分别为4.4 mm(SD 4.4 mm)、4.1 mm(SD 5.9 mm),两组COR 在水平方向上的平均绝对差值为0.8 mm(SD 0.8 mm)和1.1 mm(SD 1.0 mm),竖直方向上则为0.7 mm(SD 0.9 mm)、1.2 mm(SD 2.1 mm),机器人在髋关节发育不良患者和非髋关节发育不良患者中均获得了良好的影像学结果,其结果也与本研究相近。另一项研究验证了机器人手术精确度和手术入路及骨盆倾斜的关系[8],将COR在水平及竖直方向上较术前规划偏移>3 mm 作为结果偏差的界限。在115 例行机器人辅助THA 的患者中,COR 与术前计划偏差为(1.1±1.2)mm(水平方向)、(0.9±1.0)mm(竖直方向)。Hsieh 等[13]则直接比较了FO 和COR 在竖直方向上与术前规划的差值,而不是绝对差值,在该研究中,COR在竖直方向上偏差(2.7±1.5)mm(RMSE 3.1 mm),FO 的偏差为(0±1.0)mm(RMSE 1.0 mm)。并且他将5 mm 作为FO 和COR 位置异常的评价标准,99%的患者FO 位于合理范围内,COR竖直方向的位置结果较差,只有75%左右,而95%的患者COR竖直位置偏差在7 mm以内。
3.4 LLD
本研究中机器人在恢复下肢长度方面获得了较高的精准度。THA 术后LLD 可导致术后跛行、腰背疼痛、坐骨神经痛、脱位等[21]。Konyves 和Bannister[22]研究发现,约62%传统THA 患者术后会出现双下肢不等长。相比于传统手术方式采用术中检查等方法,机器人可在术前更加直观地进行下肢长度的规划,而机器人在手术操作中的精准度则是避免较大LLD 的关键所在。既往其他研究也获得了相似的结果。Hayashi 等[14]研究发现,机器人可将LLD 的平均绝对误差控制在4.2~4.6 mm,Stewart 等[9]研究发现,机器人平均绝对误差为3.77 mm(SD 2.94 mm)。
在回顾临床资料时发现1 例患者LLD 及股骨前倾角与术前规划差值较大(与术前规划值相比,LLD相差15.8 mm,股骨前倾角相差11°),明显偏离其他病例数据。回顾该患者病历及术中机器人系统屏幕截图等数据,发现此为1例先天性髋关节发育不良患者,Crowe Ⅲ期,下肢缩短严重,虽术前规划已考虑到髋关节畸形对手术效果的影响,术者在术中依据自身手术经验调整了手术计划,但与调整后的手术计划相比,股骨前倾角相差2.9°,获得了良好的精准度,LLD 相差8.9 mm,误差仍较大。通过分析发现,机器人辅助THA 术前规划时难以考虑软组织情况,术者需要根据术中软组织张力调整股骨头长度或松解软组织等,因而LLD 易发生较大误差,这对畸形较重、预期术后患肢长度较术前相差较大的患者尤为明显。将软组织因素纳入手术规划中将是机器人今后发展的重要方向。
3.5 本研究的局限性
本研究为回顾性研究,具备回顾性研究的典型局限性,缺乏完善的患者资料等。所有患者影像学参数测量通过患者术前及术后X 线或CT 资料进行,测量结果准确性会受到患者拍摄体位及测量者主观测量误差等影响。本研究样本量小,随访时间短,结论可靠性可能会受到影响,后期仍需要更长时间随访的大样本量研究。
3.6 机器人手术的争议
目前机器人辅助关节置换手术依存在一定争议,有学者认为机器人手术时间延长,且目前缺乏文献支持机器人辅助技术能够提高患者术后长期临床效果。因此,仍然需要更大样本量、随访时间更长的设计严谨的相关研究评价机器人辅助技术的临床应用价值。
4 结论
国产全流程辅助THA 手术机器人可以覆盖髋臼侧和股骨侧的手术操作,能够良好地辅助完成术前规划和假体植入,具有较高的精准度。
【利益冲突】所有作者均声明不存在利益冲突
