MAKO机器人辅助后外侧入路全髋关节置换术后下肢长度研究
2023-06-15马明阳张帅杨敏之孔祥朋柴伟
马明阳,张帅,杨敏之,孔祥朋,柴伟
全髋关节置换术(total hip arthroplasty,THA)被认为是现代骨科手术中最成功的手术之一[1],THA 为晚期股骨头坏死(osteonecrosis of the femoral head,ONFH)的治疗带来了革命性的改变。然而,THA 术后的下肢不等长(leg length discrepancy,LLD)可能造成患者不满意,可能引起患者出现神经损伤、腰背痛、步态异常[2],在美国,术后LLD 是造成骨科医师被诉讼的主要原因之一[3]。后外侧入路(posterolateral approach,PA)因其安全、易于操作、处理复杂病例可靠性高而成为THA 手术的主流。然而,行PA-THA时,术者常需延长下肢长度来增加髋关节稳定性[4]。
近年来,数字化和智能化日益成为医疗领域发展的趋势。在关节外科领域,机器人辅助后外侧入路(robot-assisted posterolateral approach,RPA)THA是目前利用数字骨科提升假体位置精准度、减少磨损、改善功能、延长假体生存率方面最热门的话题。机器人辅助技术的支持者认为,使用机器人可以改善LLD。机器人辅助手术在手术过程中向术者提供即时反馈可以在术中评估肢体长度和假体位置[5]。MAKO 手术机器人系统(史赛克公司,美国)属于半自动型手术机器人,是目前关节置换领域较为先进的机器人。有学者研究报道,MAKO 辅助THA 手术将有效改善患者预后,减少手术并发症,获得更好的影像学结果和术后功能[6]。
尽管既往机器人辅助THA 下肢长度的研究相对较多,但仍存在以下问题:①多数研究样本量较少;②研究对象非单一病种,术前患者下肢长度存在发育性差异,骨盆X 线片不能代表下肢长度真实情况;③研究对象不是连续病例;④多数研究关注机器人辅助THA 手术学习曲线的早期阶段,样本量有限,病例选择可能存在偏倚。
本研究旨在探讨在ONFH 患者中使用MAKO 机器人辅助THA能否更好地恢复下肢长度。
1 资料与方法
1.1 一般资料
回顾性分析解放军总医院第四医学中心骨科医学部2020年1月至2021年3月由同一术者行THA 的连续病例。纳入标准:①诊断为ONFH;②初次行THA;③采用PA;④双侧髋关节既往无手术史、严重外伤史、感染史;⑤有标准的术后骨盆X 线片且拥有完整保存的医疗记录;⑥采用MAKO 机器人辅助手术或者传统手工手术。排除标准:①临床资料不完整或术后X线片不符合标准者(骨盆旋转或倾斜的X线片,股骨髓腔轴线与中位线夹角>10°,X 线片上至少有一个小转子或泪滴难以确定);②髋关节周围存在其他疾病,如神经肌肉病、肿瘤等患者;③术前通过双下肢全长负重位X线片确定双下肢股骨、胫腓骨长度差异超过2 mm患者。
根据上述纳入与排除标准筛查,154 例患者纳入本研究。其中男95 例,女59 例,年龄20~72 岁,平均(48.6±12.0)岁。其中RPA 组68 例,PA 组86 例。有58 例患者接受了双侧THA,96 例患者接受了单侧THA。RPA 组92 髋平均Harris 评分(52.5±18.3)分,PA 组120髋平均Harris评分(52.6±16.2)分,差异无统计学意义(t=0.010,P=0.992)。两组患者年龄存在差异(P<0.05),性别、体重指数(body mass index,BMI)、单双侧差异均无统计学意义(P>0.05,表1)。
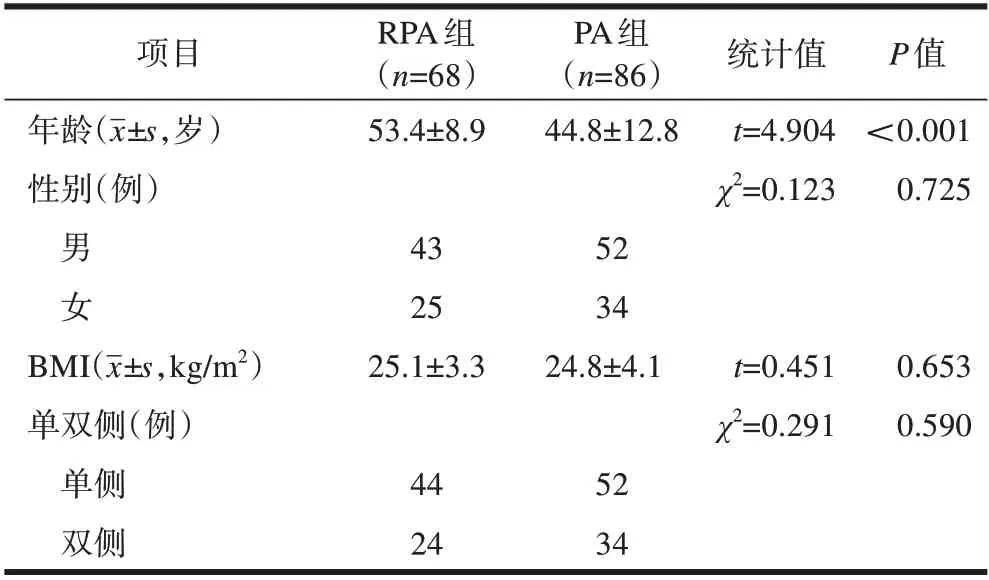
表1 两组患者术前基线资料比较
本研究已通过中国人民解放军总医院伦理委员会审批(S2019-052-01),并豁免患者知情同意。
1.2 手术方法
1.2.1 术前规划
RPA 组患者入院后行骨盆、髋关节和膝关节CT扫描,将CT 数据导入史赛克(美国)机器人手术中心,模拟生成股骨近端和骨盆三维模型。根据髋臼模型确定假体位置和大小。根据患者髋臼的原始解剖形态及术者的经验将髋臼假体放置目标设定于外展35°~45°和前倾15°~25°。以髂前上棘连线为基准进行冠状面校正,在冠状面规划髋臼杯的外展角度与高低位置。在横断面上,髋臼假体放置于前柱与后柱之间,同时位于髋臼底部的中间位置。RPA组髋臼计划磨锉深度为去除所有髋臼软骨,尽可能保留软骨下骨,向内不穿透内壁,尽量将髋臼磨削成半球形。所有手术均以保证髋关节稳定性的前提下,以最大可能恢复髋关节等长和偏心距为目标。
在传统手工PA-THA 手术中,使用OrthoView 6.6.1 软件进行标准的影像学模板测量规划,以确定假体的大小和位置、股骨头颈部截骨位置、下肢长度延长或缩短量。
1.2.2 术前准备及手术技术
所有手术均在全身麻醉下,由同一名经验丰富的、已通过机器人学习曲线的高年资关节外科医师主刀。所有手术均采用侧卧位PA。
在传统手工PA-THA 手术中,先行髋臼侧准备,包括常规切皮、显露及钝性分离阔筋膜、松解臀大肌止点、切开短外旋肌群肌腱、“T 形”切开后关节囊,将髋关节脱位、股骨颈截骨、显露髋臼、磨锉髋臼、安装臼杯、剔除髋臼周围骨赘。然后行股骨侧准备,包括股骨扩髓、挫髓、假体试模并复位、测试稳定性及检查下肢长度、安装股骨假体。最后修复关节囊,重建外旋肌,逐层缝合切口。
在RPA-THA 手术中,使用MAKO 机器人系统(Stryker 公司,美国)辅助医师术中行RPA-THA。在术侧髂前上棘处植入3 枚骨螺钉以固定和安装骨盆参考架。常规切开显露,在髋关节脱位前,注册股骨近端和髌骨下极标记点来测量术前腿长和偏心距。脱位后开始髋臼注册:包括髋臼方向的判定点、注册点和确认点,系统自动将术前CT 扫描重建的3D 模型与髋关节真实解剖结构拟合。从而实现在机械臂的引导和限制下按照计划进行髋臼磨削及安装髋臼假体。然后行股骨侧操作,具体方法是屈髋、内收并内旋,屈膝使胫骨垂直地面。逐步显露股骨近端,依次进行开口、扩髓和试模。在安放试模后,使用探针定位股骨近端和远端的标记螺钉和电极标记点,MAKO 系统可即时反馈下肢长度和偏心距等数据。术者可以在术中通过屏幕数据变化直观了解髋关节长度和偏心距变化。全方位活动髋关节并轴向加压以测试髋关节稳定性,术中触诊股骨头以确保无撞击或半脱位。尤其需要注意测试在伸直外旋、屈曲90°并内旋45°、屈曲40°时内收时,髋关节无脱位或撞击。所有手术均在可接受的稳定性前提下尽量恢复双下肢长度。测试稳定性、长度、偏心距均满意后放置股骨假体。最后常规重建后关节囊和外旋肌群、缝合切口。
本研究中,RPA-THA 手术不增加患者的额外花费,且在术前告知患者实施RPA 的收益及风险,所以患者可以自由选择是否使用机器人辅助手术。基于CT 的导航软件可以直接测量LLD 的变化,在术中术者可以通过屏幕直接了解LLD 的变化。在传统手工PA-THA 中,通过术中触诊髌骨下极和内外踝来确定下肢长度。
RPA 组手术采用手术假体为Trident 髋臼杯和Accolade Ⅱ股骨柄假体(Stryker,美国)。PA 组中47例患者使用pinnacle 髋臼杯与tri-lock 股骨柄(DePuy公司,美国),39 例患者使用combicup 臼杯与LCU 股骨柄(Link公司,德国)。
1.2.3 术后处理及随访
术中、术后给予常规抗感染药物,第一次给药时间在麻醉后,参考中国人民解放军总医院常见耐药菌数据,给予头孢呋辛或者头孢美唑钠,头孢过敏患者或者高风险患者使用万古霉素,常规给予抗凝(常规使用阿司匹林或低分子肝素抗凝)及多模式镇痛(包括局部注射罗哌卡因、口服及注射非甾体抗炎药)。术后首日视患者情况下床活动,指导患者进行踝泵运动以预防血栓、锻炼肌肉力量。患者分别于术后3个月、6个月、1年于门诊随访。
1.3 数据收集与影像学测量
回顾性分析所有入组患者临床资料,包括年龄、性别、术侧、身高、体重和BMI。在术后骨盆前后位X线片上测量LLD。
骨盆正位X线片在麻醉苏醒前于手术室拍摄,双侧髌骨朝前、双下肢略内旋位摄片。将X 线片导入Orthoview软件的测量软件进行测量。以对侧髋关节作为测量的参考。用已知尺寸的陶瓷头作为标尺校准X 线片放大率。在骨盆正位X 线片上测量LLD。连接双侧泪滴作为水平参考线[7]。从双侧小转子最突出的部分做两条垂直于泪滴间线的垂线。定义LLD 为术侧和非手术侧髋关节之间的垂线距离的差值(图1)。如果术侧肢体比非手术侧肢体长,则LLD为正值,否则LLD 为负值。在同时接受双侧手术的患者中,以首先手术的一侧髋为参考。在计算平均值时,取LLD绝对值。
所有的术后X 线片由两名非手术医师独立测量2 次,首次于患者术后摄片后测量,第2 次测量与第1次测量间隔2周,以消除偏倚和提高测量精确度。测量人员对彼此的测量结果和所进行的手术类型均不知情。取4次测量值平均值记为该患者 LLD。
1.4 统计学方法
采用SPSS 25.0软件进行统计学分析。计量资料使用单样本Kolmogorov-Smirnov 进行正态性检验,如符合正态分布以均数±标准差表示,组间比较采用独立样本t检验;如不符合正态分布以中位数(四分位数间距)表示,组间比较采用Wilcoxon 秩和检验。计数资料比较采用卡方检验或Fisher 确切概率法。以P<0.05为差异有统计学意义。
2 结果
与PA 组比较,RPA 组术后LLD 均值更小,且差异有统计学意义[(5.7±4.0)mmvs.(4.1±3.4)mm;t=2.585,P=0.011]。
当设定>3 mm为界值时,RPA组有33 例(48.5%)患者LLD>3 mm,PA 组有57 例(66.3%)患者LLD>3 mm,两组间差异有统计学意义(χ2=4.926,P=0.026)。当设定>5 mm 为界值时,RPA 组有20 例(29.4%)患者LLD>5 mm,PA 组有37 例(43.0%)患者LLD>5 mm,两组间差异无统计学意义(χ2=3.018,P=0.082)。当设定>10 mm 为界值时,RPA 组有2 例(2.9%)患者LLD>10 mm,PA 组有5 例(5.8%)患者LLD>10 mm,两组间差异无统计学意义(P=0.465,图2)。典型病例见图3。
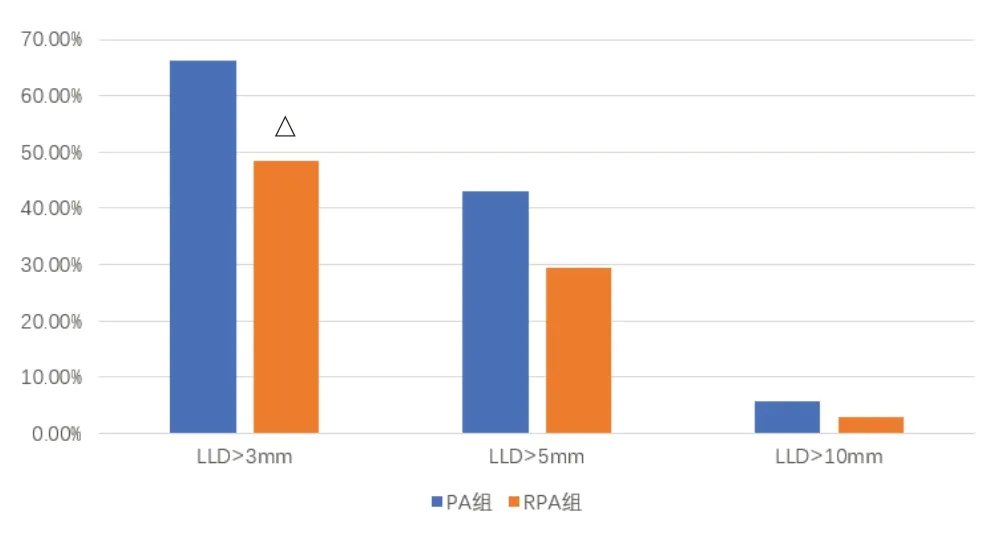
图2 PA组与RPA组LLD超出规定界值患者比例比较
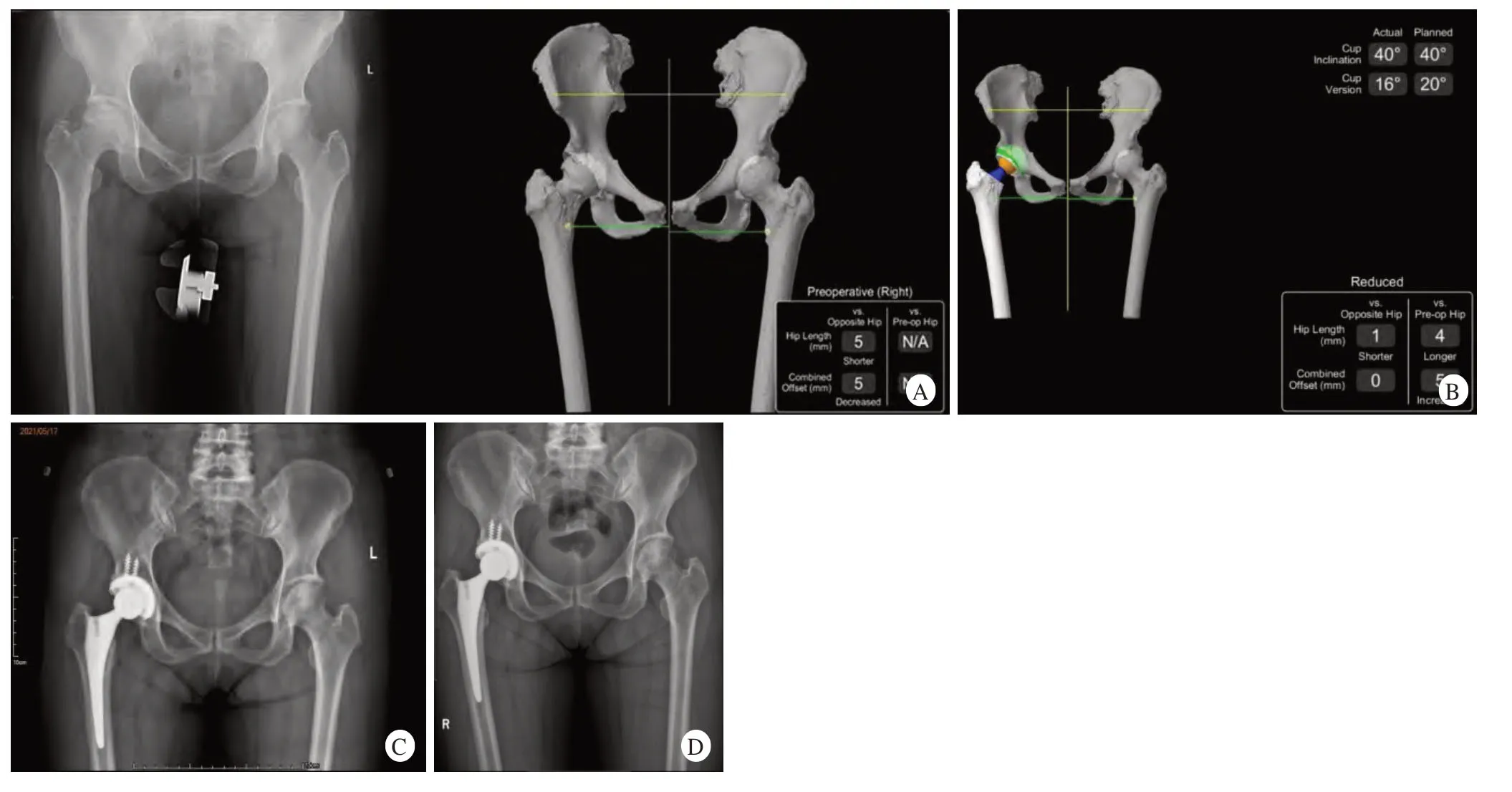
图3 患者,女,52岁,双侧ONFH,行右侧RPA-THA
3 讨论
虽然THA 被广泛认为是现代医学中最成功的外科手术之一,但其并不完美。THA 术后LLD 的存在仍然是一个主要问题[8]。本研究结果显示,RPA-THA比传统PA-THA 在减少LLD 方面更有优势,但优势相对有限。在ONFH 患者中,RPA 组较PA 组LLD 均值更小,且差异有统计学意义。当设置LLD 界值为3 mm 时,两组之间超过界值患者比例差异有统计学意义。当扩大LLD 界值为5 mm 和10 mm 时,两组之间超过界值患者比例差异无统计学意义。早期研究表明,机器人系统具有较高的精准性,在恢复肢体长度和偏距方面有明显优势。在术中,机器人在三维空间中监控术者手术操作,并且可以及时反馈数据,术者根据反馈结果可随时做相应的调整。本研究发现,无论是否采用机器人辅助手术,随着术者手术量和手术经验的提高,LLD 的发生率均可得到较好控制。本研究为了统一手术技术,提高科学性,所有机器人手术均采用了Express 模式,没有采用Enhance模式。根据Cozzi Lepri 等[9]的研究,Express 模式和Enhance 模式同样准确。所有的机器人辅助手术均在史赛克公司MAKO 机器人技术顾问指导下进行,机器人操作成熟规范,可重复性强。有学者认为,机器人辅助手术受手术技术影响,可以通过改善假体位置来获得稳定性,定位可更好地联合前倾角度,不易脱位[10]。传统手术假体位置相对较少处于安全区内,倾向于通过延长髋关节长度以获得额外稳定性[11]。传统手工手术组通过术中触诊髌骨下极来判断下肢长度,受术者经验和患者体位影响较大,机器人可较好克服这一困难,可重复性强。本研究发现机器人确实可以降低术后LLD。但是否能改善患者预后,减少并发症的发生,带来积极的影响仍有待探讨。因为机器人辅助手术术中确定骨盆空间位置仍然具有挑战性,骨盆倾斜、患者肥胖、髋关节屈曲挛缩,均对机器人定位骨盆位置产生影响。
有学者研究认为LLD<10 mm 耐受性很好而且不会产生症状[12],LLD<5 mm 时患者无法察觉差距[13]。当分别设置5 mm、10 mm 为界值时,两组界值外患者例数差异无统计学意义,说明虽然RPA 组LLD 均值更小,但未显著减少患者发生下肢不等长的比例,机器人辅助手术减少LLD 的作用有限。有研究使用了包括二维或三维的术前规划、术中透视等方法来控制THA 术后LLD。也有研究对RPA、直接前方入路(direct anterior approach,DAA)和PA 患者术后LLD 进行了比较,其研究回顾了67 例RPA、29例DAA 和59 例PA 髋骨关节炎患者,结果表明,所有组均达到了临床可接受的平均LLD[14]。该研究得出结论,手术的准确性提高得益于手术量的积累、精确的术前模板测量规划和仔细的术中操作和评估。但在该研究中,不同组患者在基线上存在显著差异,且该研究缺乏匹配。Kayani 等[15]比较了由同一名外科医师手术的25例RPA患者和50例传统手工PA患者,发现在实现腿长矫正时,机器臂辅助THA 和传统手动THA 之间没有差异。但是该研究样本量较少,结论可能存在偏倚。与他们的研究不同,本研究除年龄分布有差异外,其他基线水平基本相同。患者年龄因素对手术技术操作影响不大,所以,本研究对象具有更高的可比性。本研究样本量较大,时间跨度较长,病种选择单一,术前通过下肢全长片排除股骨和胫腓骨存在明显发育不对称患者,结果更具有参考意义。
两项早期研究发现,RPA 组患者术后LLD 更小,差异有统计学意义[16-17]。认为机器人辅助手术能更准确恢复患者下肢长度。但其研究均为开展机器人手术的早期探索阶段,样本量较少,且研究对象为所有拟行手术治疗的患者,病情差异较大,或其研究未排除下肢股骨和胫腓骨发育不对称患者,结果参考价值有限。本研究未纳入发育性髋关节发育不良及其他双下肢长度发育异常的患者。该类患者股骨和胫腓骨常受发育影响,股骨与胫腓骨存在长度左右不对称。髋关节局部测量不能代表下肢真实长度。ONFH患者鲜有股骨及胫腓骨发育左右不对称发生,并且术前通过下肢全长片排除了股骨及胫腓骨发育不对称患者,结果更具有科学性。这也是本研究的创新点之一。本研究由同一名外科医师进行手术,且研究对象均选择ONFH患者,减少了由于手术技术和患者病情差异带来的偏倚。虽然两组患者年龄存在差异,考虑为现阶段MAKO 机器人不能使用陶瓷内衬,而临床上年轻患者更倾向于使用陶瓷内衬所致。两种手术采用的假体衬垫不完全相同。由于机器人系统的封闭设计只能使用聚乙烯衬垫,而选择传统手术方式行THA 患者多选择陶瓷衬垫。机器人手术组聚乙烯衬垫有高边,而传统手术组使用的陶瓷衬垫无高边。且二者衬垫形状、材质均有差别,也可能带来差异。考虑到患者年龄和内衬材料对下肢长度影响有限,所以两组患者之间仍具有相当的可比性。
因此,有经验的外科医师无论进行哪种手术方式行初次THA,都能控制LLD在临床可接受的范围内。Kishimoto 等[18]的研究也得出了类似的结论。但这一结论不能进一步推广,特别是对于初学者或复杂的情况。机器人辅助手术在定位臼杯于最佳角度方面,仍然具有十分重要的价值与意义[19]。但是也要意识到机器人技术可能存在风险因素,如术中并发症发生率更高、患者受到辐射量增大、出血量增大和手术时间延长等。此外机器人技术还会带来额外的费用,如安装和维护费用,这也远超过手术费用成本。
本研究也有一定的局限性:①作为一项回顾性研究,结果可能不如随机对照研究客观;②尽管采用以髋关节泪滴间线为参考测量LLD 是目前较为公认的测量“金标准”[20],但术后未拍摄下肢全长负重位X线片,只通过髋关节局部X 线片测量来判断双下肢长度是否相等;③由于该研究的所有手术都是由同一名外科医师在同一中心使用单一的机器人辅助系统实行,其推广性是有限的。考虑到现有的技术多样性,本研究结论可能并不适用于其他机器人辅助系统。
4 结论
本研究证实,与传统PA-THA 相比,RPA-THA 恢复术后下肢长度更具有优势,但是其是否能带来临床预后的改善仍有待探讨。因此,在推广机器人辅助手术技术之前,还需要进一步研究,以确定此类手术是否存在显著优势以平衡机器人手术增加的手术时间和经济成本。
【利益冲突】所有作者均声明不存在利益冲突
