基于3P(4S)机构的易损线辊包装线设计与分析
2023-06-15刘毅韩伟达耿旭森赵永生丰宗强刘晓飞
刘毅,韩伟达,耿旭森,赵永生,丰宗强,刘晓飞
(燕山大学 河北省并联机器人与机电系统实验室,河北 秦皇岛 066004)
机器人技术引进包装生产中,提高了自动化水平。并联机器人结构刚度大、模块化程度高、控制相对容易,在自动化包装领域中得到成功应用[1]。ABB公司生产了以IRB340 为代表的Delta 并联机器人[2]。FANUC[3]推出了分别针对小轻型零件、中轻型零件以及大重型零件搬运问题的不同系列Delta 并联机器人;Adept 公司先后推出了具有H4 结构的Delta 并联机器人[4]。CODIAN 推出了针对大型码垛的二轴Delta机器人,用于食品生产线的四轴Delta 机器人[5]。董旭等[6]提出了一种三自由度并联包装机构。樊文龙等[7]提出一种2–RPU/2–SPU 并联机构用于物流快递分拣。孔一啸等[8]提出一种基于2–CPR/UPS 并联机构的三平移移印机。马振东等[9]提出一种基于2–RPS/UPRS 并联机构的自动分拣机。米文博等[10]将2–UPR/RSPR 并联机构应用于药品包装生产线。上述应用于包装产线的并联机构自由度少,承载能力弱,不适合于多姿态、大范围、高负载的工件分拣与包装。
易损类线辊包装生产线系统属于包装机械领域的机电一体化设备,具有执行机构多,工艺路线复杂且连续性要求高,以及系统安全稳定性要求高等特性。本文基于三平动并联机器人设计能实现线辊自动化的包装生产线,分析3P(4S)并联机构位置正反解、工作空间及动力学,通过对整体结构联合仿真来验证设计的可行性。
1 易损类线辊包装线设计
1.1 包装线设计
本文研究对象为易损类线辊包装生产线,包含机械运动方案设计和空间布局设计[11]。易损类线辊包装线实现线辊的转运、套袋、抽真空、装箱包装。目前,线辊包装线上下料、套袋、装箱都需要人工操作,生产效率低,劳动强度大。为实现线辊包装自动化,提高生产率,设计基于三平动并联机构的线辊自动化包装线,设计分析如图1 所示。
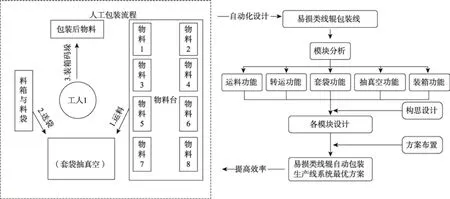
图1 易损类线辊包装生产线设计分析框图Fig.1 Analysis block diagram of vulnerable wire roller packaging production line
在易损类线辊包装线工艺流程基础上,合理布置整条包装线设备。在有限空间内实现包装生产线所需功能以及人机交互布局[12],如图2 所示。易损类线辊包装生产线总体方案包括运料车、并联机械手、末端旋转撑爪、套袋单元、抽真空单元,通过机械手和其他功能模块配合完成线辊的上料、运料、翻转、套袋、抽真空、下料装箱等流程,具有精度高、速度快、工作稳定、结构紧凑等优点,关键参数见表1。

表1 设计参数Tab.1 Design parameters
1.2 包装线整体构成及工作流程
1)运料车结构设计。如图3 所示,运料车通过剪叉机构实现升降运动。驱动舵轮与随动万向轮组合,实现运料车灵活运动。
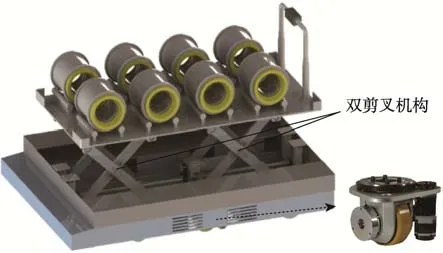
图3 运料车结构Fig.3 Structure of hopper car
2)套袋机单元设计。如图4 所示,套袋机由供袋单元、撑袋单元和送袋单元组成。供袋单元:料袋置于套袋机机架上,通过卷轴驱动换袋。撑袋单元:包含吸切封刀和旋转拨杆,切封刀可实现料袋封切,吸盘可实现料袋撑口,旋转拨杆可调整袋口形状。送袋单元:由直线模组和气动手指组成,实现送料且保证料袋不变形。

图4 套袋机结构Fig.4 Structure of bagging machine
3)抽真空单元设计。如图5 所示,电磁夹杆夹持送袋,将料袋送进抽真空口处,真空泵抽出料袋内空气,将料袋封口。

图5 抽真空机Fig.5 Vacuumizer
4)并联机械手运料模块设计。将3P(4S)并联机构在运料模块中应用,如图6 所示,3 组连杆相对动平台中心对称分布,具有相同的运动链且均含一个闭环平面四边形机构。相较于串联三轴机械手,并联机械手具有刚度大、承载能力强、精度高、末端惯性小、稳定性好等优点,保障易损线辊的稳定分拣、转移。
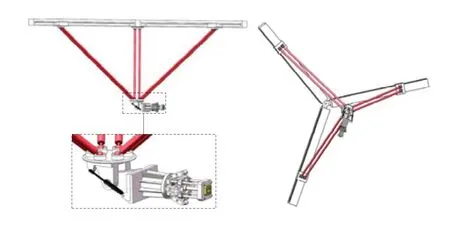
图6 三平动并联机械手Fig.6 Three translation parallel manipulator
末端旋转撑爪:在线辊包装过程中需将水平状态的线辊翻转90°,使其竖直放置到套袋工位,末端旋转撑爪采用3 组气缸来实现撑爪的90°转动。用丝杠滑块结构实现从线辊内部将线辊张开撑紧固定,保证在转运过程中线辊的稳定,如图7 所示。

图7 末端机械手Fig.7 End manipulator
易损类线辊包装生产线的具体工艺流程:运料车将线辊运送至包装工位并完成对接;转运机械手将线辊从运料车上取料,并通过末端翻转手翻转线辊,运动到箱口上方;套袋机提供料袋并撑开料袋口;机械手将线辊放进料袋,套袋机调整袋口形状,2组移动气缸指将料袋的两角夹紧,完成套袋;线辊与料箱随传送带运动至抽真空单元,2 组移动气缸指在直线模组驱动下与传送带同步运动;抽真空机开始工作,抽出料袋内空气;抽真空机工作同时,下一个线辊的包装工作开始运行,依次循环,进行线辊的连续包装工作。
2 工作空间分析及求解
2.1 3P(4S)并联机构位置分析
如图8 所示,以定平台对称成120°分布的3 个支架外接圆心为坐标原点,x轴与驱动1 分支重合,y轴与驱动分支1 垂直,z轴竖直向下,支链杆长l为1 500 mm,动平台球铰点到动平台中心距离r为60 mm[13]。
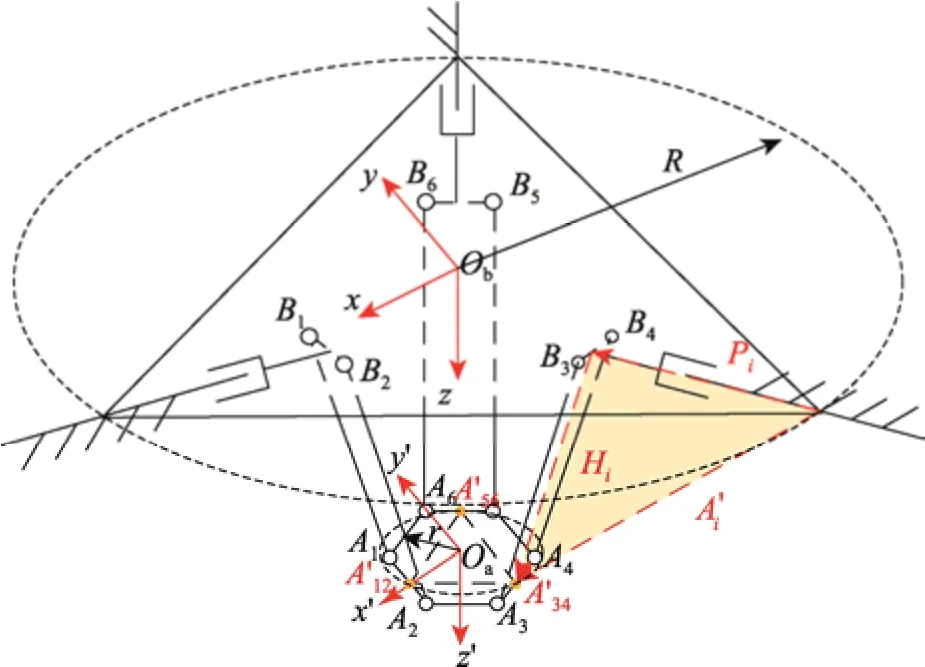
图8 3P(4S)并联机构简图Fig.8 A sketch of 3P (4S) parallel mechanism
2.1.1 3P(4S)并联机构位置反解
通过分析该并联机构一个分支即可分析其位置反解。动平台上球铰Ai点在固定坐标系中的向量A'可通过矢量关系表示出来,见式(1)。
姿态矩阵见式(2)。
分支简图中的矢量关系可表示为:
是中:Pi为移动副的位移量;Hi为杆长向量。
根据位姿坐标变换矩阵可计算该机构中动平台上3 个点相对于固定坐标系的坐标,分别为:
将各个坐标关系代入式(4)后平方计算,整理后可得移动副的位移见式(5)。
2.1.2 3P(4S)并联机构位置正解
采用数值法或解析法解决并联机构的正解问题[14]。设定平台三角形外接圆半径为R,动平台虚线三角形部分外接圆半径为r,点Oa的坐标为Oa= (x,y,z),可求得3 个移动副中心点坐标为:
动平台中虚线三角形各顶点坐标为:
4S 支链杆的长度为l,可得到一个三元二次方程组,见式(8)。
解此方程组可得到x,y,z的值即得位置正解。
2.2 工作空间分析
本文用数值法分析工作空间[15]。
1)移动副的运动距离。移动副的运动范围应介于最大值和最小值之间,见式(9)。
2)球铰的转角约束。k1和k2是球副两端的2 个向量,则两连杆间的夹角,可表示为:
且转角介于最大值与最小值之间,见式(11)。
3P(4S)并联机构定平台和动平台半径分别为1 722、100 mm,连杆长度均为1 500 mm。利用Matlab采用边界搜索法绘制工作空间,如图9 所示。

图9 工作空间Fig.9 Workspace diagram
每个线辊的位置坐标如表2 所示。
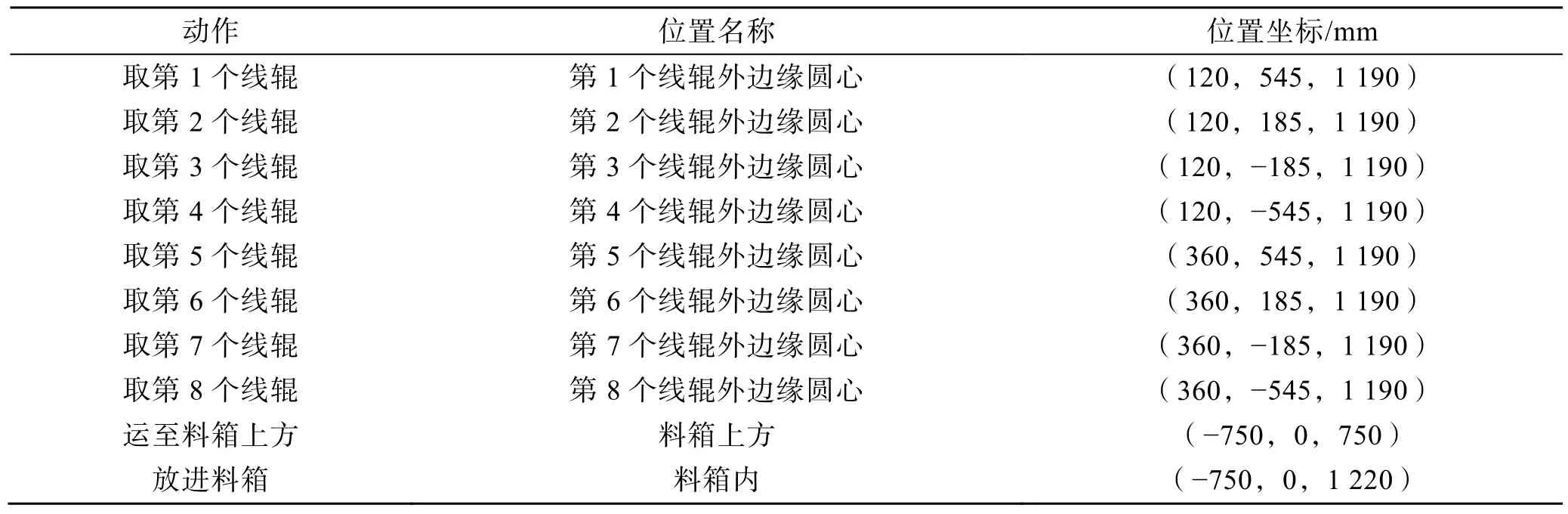
表2 工作空间关键位置点Tab.2 Key location points of workspace

表3 构件参数Tab.3 Component parameters
如图10 所示,并联机械手在其工作过程中的极限点的位置都在所描绘的工作空间范围内。
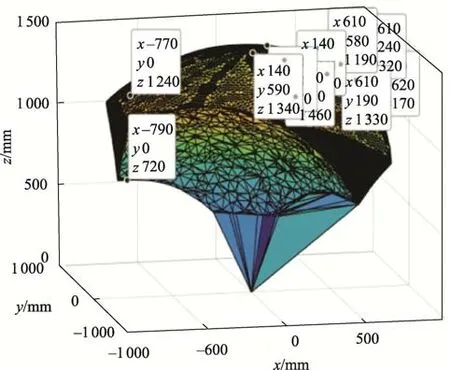
图10 位置点图Fig.10 Map of positions
3 并联机械手运料模块动力学分析
3.1 动力学建模
位置反解关系式的两端同时对时间t求导可得:
用vp表示输入速度,v表示输出速度,则输入速度与输出速度之间的关系可表示为:
vP=G⋅v(13)
通过求导可得到G:
J为并联机构的雅可比矩阵,见式(16)。
滑块速度vp与广义速度vq之间的关系为vp=Gvq,求解支链杆的速度,并进行速度分析,如图11 所示。
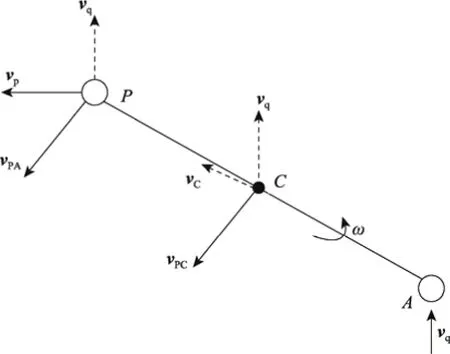
图11 分支速度关系图Fig.11 Branch speed diagram
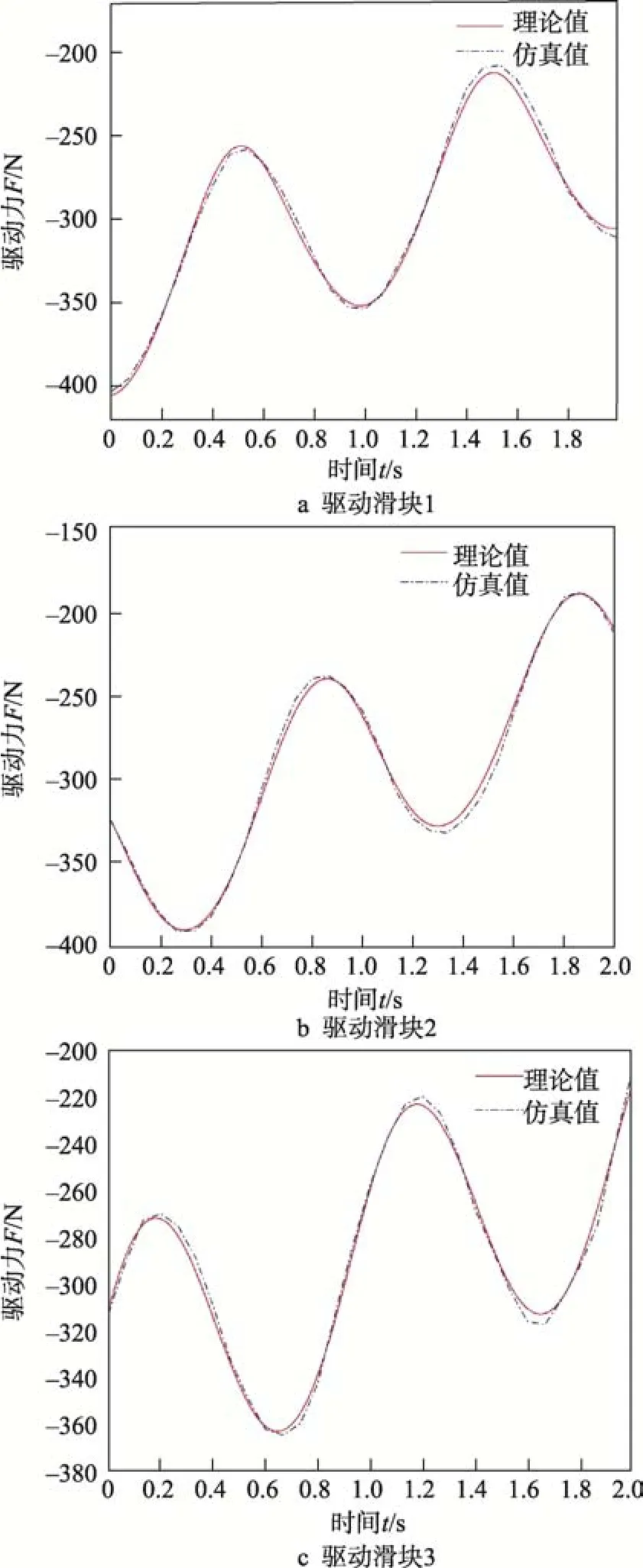
图12 滑块驱动力对比Fig.12 Comparison of driving force of slider
假设连杆向上做平面运动,滑块运动方向和动平台运动方向见图11,求解连杆质心C点运动速度。
质心相对P点的速度为:
根据分析的各构件速度,以拉格朗日动力学建模方法为理论基础,求解L函数,分析系统总能量[16]。
1)动能分析。3P(4S)并联机构在工作过程中的所有活动构件包括3 个滑块、6 根支链杆和动平台,分析各个构架的动能如下。
滑块的动能:
式中:1m为滑块总质量;vP1、vP2、vP3分别为滑块的移动速度。
连杆动能:
式中:I为支链杆转动惯量;ω为支链杆转动角速度;2m为6 根支链杆总质量;vC为支链杆质心速度。
动平台动能:
式中:3m为动平台总质量;vx、vy、vz分别为动平台质心3 个移动方向的运动速度。
综上,可得3P(4S)并机构系统的总动能为:
2)势能分析。以定平台为零势能面,并联机构的总势能见式(23)。
式中:1z、z2分别为平行四边形支链杆质心和动平台质心到零势能面的位置矢量。
3)广义力分析。拉格朗日动力学方程见式(24)。
式中:L为拉格朗日因子,L=M−E;iq为广义坐标;iq˙为广义坐标的一阶导数;iQ为广义力。
根据虚功原理,总虚功为:
广义力为:
同理可得其他2 轴方向的广义力,联立3 组广义力方程和雅可比矩阵可得广义力与驱动力的关系为:
由式(27)可求解出滑块驱动力唯一解,可通过给定动平台的负载以及运动参数求解滑块的驱动力。
3.2 动力学仿真
将动力学方程在Matlab 软件中进行编程,给定动平台的参数及轨迹方程,动平台运动轨迹参数方程见式(28)。
4 包装线仿真分析
在UG NX–MCD 仿真平台中建立线辊包装生产线虚拟样机模型。仿真流程如图13 所示,将模型导入机电概念设计模块中,添加各模块物理属性,定义包装生产线模型运动行为特性,添加控制执行器与传感器使产线完整地进行仿真运动。在Simulink 中添加OPC 服务器组件,输入与输出信号通过OPC 进行传递与交互。根据并联机构及各个驱动需要到达的位置建立相应关系。其中,根据并联机构末端位置建立时间与速度关系式,如表4 所示。

表4 并联机械手轨迹路线Tab.4 Parallel manipulator trajectory route
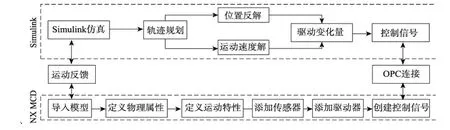
图13 联合仿真流程Fig.13 Joint simulation process
虚拟样机模型按照设定运行,包装线整体依次进行转运线辊、翻转线辊、线辊套袋装箱、料袋整形、传送线辊、抽真空等流程[17]。包装工艺流程如图14所示。
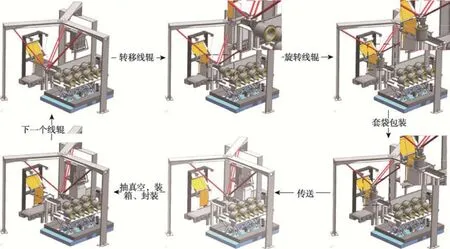
图14 包装工艺流程Fig.14 Process flow of packaging
并联机械手转运模块:并联机械手按规划轨迹运动,运动至第1 个线辊口—伸进线辊内部—撑起线辊—翻转线辊并运至料箱上方—套袋放进箱—上升复位—机械手复位,共耗时27 s。
套袋机模块:并联机械手模块将线辊放进箱后复位过程中,2 个旋转拨杆进行袋口整形,随后气缸推指夹住两边袋口,在直线模组驱动下与传送带同步运动至抽真空工位。抽真空机开始工作,气缸推指复位,复位后套袋机提供料袋至料箱内,封切刀将新的料袋上端连接处封口,下端切开,吸板将袋口撑开,为下一周期开始做准备。
各部分运动连续,并联机械手模块运动稳定并到达所需位置,整个易损类线辊包装生产线完整、连续,并联机构按规划的轨迹运动,其轨迹如图15 所示,与设定的规划轨迹一致。

图15 整体运动仿真轨迹Fig.15 Overall motion simulation trajectory
对易损类线辊包装线整体的虚拟仿真过程中,从运料车运动至指定位置且运料板也上升到指定位置开始,并联机械手搬运第1 个线辊,到并联机械手开始搬运第2 个线辊停止,完成1 个线辊包装流程。该过程共耗时约46 s,提高了包装效率,验证了并联机构功能设计的正确性。
5 结语
本文针对表面易损类线辊线辊,设计了自动化包装生产线,并基于三平动并联机器人技术对该包装线进行了分析与研究,通过联合仿真证明了设计的可行性。得到如下结论:
1)提出了一种与并联机械手配合工作的套袋方法,实现线辊的自动化包装,3P(4S)并联机构实现了易损线辊稳定搬运。
2)利用矢量分析法完成了3P(4S)并联机构正反解分析,利用数值法对并联机构的工作空间进行求解,证明所设计的机构满足工作要求。分析了并联机构中各构件间的速度关系,利用拉格朗日动力学建模方法建立了动力学模型,求解出各驱动滑块的驱动力,并由仿真分析验证了动力学分析的正确性。
3)基于MCD 与Simulink 对包含有并联机器人模块的易损类线辊包装生产线进行了联合仿真,实现了易损类线辊包装生产线整体虚拟运动仿真,验证了并联机械手模块的性能以及整体包装线的可行性。
