C-NCAP2021法规中对二轮车场景AEB性能满分要求分析及试验验证
2023-06-14詹厚顺罗华平
詹厚顺,罗华平,袁 英,邓 晶
C-NCAP2021法规中对二轮车场景AEB性能满分要求分析及试验验证
詹厚顺,罗华平,袁 英,邓 晶
(江铃汽车股份有限公司,江西 南昌 330001)
2022年1月1日正式实施了中国新车评价规程(CNCAP)2021版标准,新增了中国独有的对二轮踏板车的自动紧急制动(AEB)试验要求。基于CNCAP2021版中对二轮踏板车的AEB试验要求,结合车辆制动系统特性,分析并计算出为满足该场景试验得满分的要求,AEB系统触发需要的碰撞时间(TTC),并实车测试验证该TTC时间。根据所需要的碰撞时间,结合实际二轮电动车与车辆的碰撞场景,及二轮电动车的制动性能,分析并实际模拟测试,得出了AEB系统在实际使用中,不能完全与CNCAP完全一样的策略,需要根据实际的复杂情况细化场景中车辆及二轮车的各种参数及二轮电动车驾驶行为,以提高车辆触发AEB的客户体验。
CNCAP2021;二轮踏板车;自动紧急制动;实际道路场景
自动紧急制动(Autonomous Emergency Break, AEB)系统利用现代传感器技术实时对车辆的周围环境和车辆行驶状态进行探测,并根据算法预判当前环境的危险程度,当检测到前方有潜在碰撞危险时,系统发出报警并进一步提供制动力,通过自动制动等主动介入方式来避免碰撞事故的发生或减轻碰撞事故的严重程度[1]。随着技术的发展及法规的完善提升,市场上的车辆对辅助驾驶的装配率越来越高,尤其是与安全相关的前碰撞预警(Forward Collision Warning, FCW)及AEB功能。据调查数据显示,2020年国内乘用车AEB装配量超过600万辆,同比增速为50%[2]。
2020年下半年,中汽研发布CNAP2021版的管理规则[3],并于2022年1月1日正式实施,其主动安全试验中,新增了中国独有的对二轮踏板车的AEB试验要求,二轮踏板车以20 km/h的速度横穿,而试验车辆以20~60 km/h不等速度行驶,在测试车辆及二轮踏板电动不做任何措施时最终于车辆中心点碰撞二轮车前轮最前端。该试验场景的选取,在随后公布的主动安全研究报告[4]中已经明确说明,根据国内事故的数据统计后得出,切合中国现有道路行驶及事故实际,与不少文献研究相符[5-7]。该项试验在主动安全试验中满分为4分,4个速度分为6分权重,具体如表1所示。
表1 二轮踏板车AEB试验得分权重分配
自车车速/(km/h)权重得满分时碰撞车速/(km/h) 3020 4020 501<30 601<40
至2022年8月末,根据中汽研官网公布的信息显示,有11款车型抽取试验但却未正式公布结果[8],实际得分并不清楚,数据不足,参考少。在学术研究中也多是AEB算法、模型、软件模拟等的研究,极少数如郭风虎等[9]基于轿车二轮车的事故,进行模拟仿真并分析AEB系统参数的影响。
本文以中国新车评价规程(China New Car Assessment Program, CNCAP)2021版试验要求中的AEB对电动踏板二轮车场景得满分为目标,分析计算车辆的AEB系统触发时的碰撞时间(Time To Collision, TTC),其计算及定义等相关信息详见文献[10-11]要求,并使用AEB测试用二轮电动踏板车假车、拖拽牵引系统、驾驶机器人、差分全球定位系统(Global Positioning System, GPS)等设备,按CNCAP中相关测试要求,实车测试相应的TTC参数时AEB对二轮电动踏板车的表现。随后,进一步分析,以相同TTC参数及策略在实际场景中遇到电动车时的表现,并使用设备模拟测试对应的场景,以验证参数及策略的适用性,为AEB针对二轮车的实车开发及标定提供参考。
1 试验参数及设备
在实际场景模拟分析之前,先假设试验参数的边界及范围。
在试验过程中,要求路面的摩擦系数超过0.9[3],即在该路面上试验,理论上车辆AEB稳定时的最大制动力可以达到0.9以上,实际试验时最大减速度瞬时峰值会大不少,但平均减速度值却会小不少。图1为AEB触发时的制动减速度示意简图,即按试验要求对应图中的0的值小于-9 m/s2,实际大部分AEB制动时稳态减速度会落在-7 m/s2至-9 m/s2之间,如福特领睿平均为 -8.5 m/s2,本文稳态制动减速度0设为-8.5m/s2。
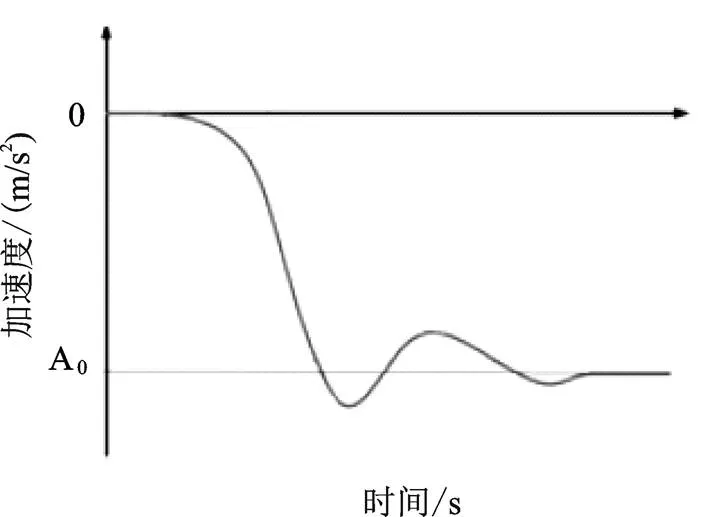
图1 车辆AEB制动减速度典型曲线示意图
在AEB过程试验及实际触发中,系统探测到可能存在碰撞后,会将AEB的请求通过控制器局域网(Controller Area Network, CAN)信号发送至车身电子稳定控制(Electronic Stability Controller, ESC)系统,ESC系统驱动电机建压并制动减速,整个过程时序如图2所示。现市面上对二轮车的AEB,未有分级制动策略,都是触发AEB后全力制动。整个触发及制动过程中,有两段延迟时间即通讯延迟时间及制动响应时间,定义如下:
通讯延迟时间,即从探测系统发出请求到ESC接收到请求的时间,一般不会超过0.1 s(如福特领睿一般情况下为30~60 ms),下文中该时间固定取0.1 s。
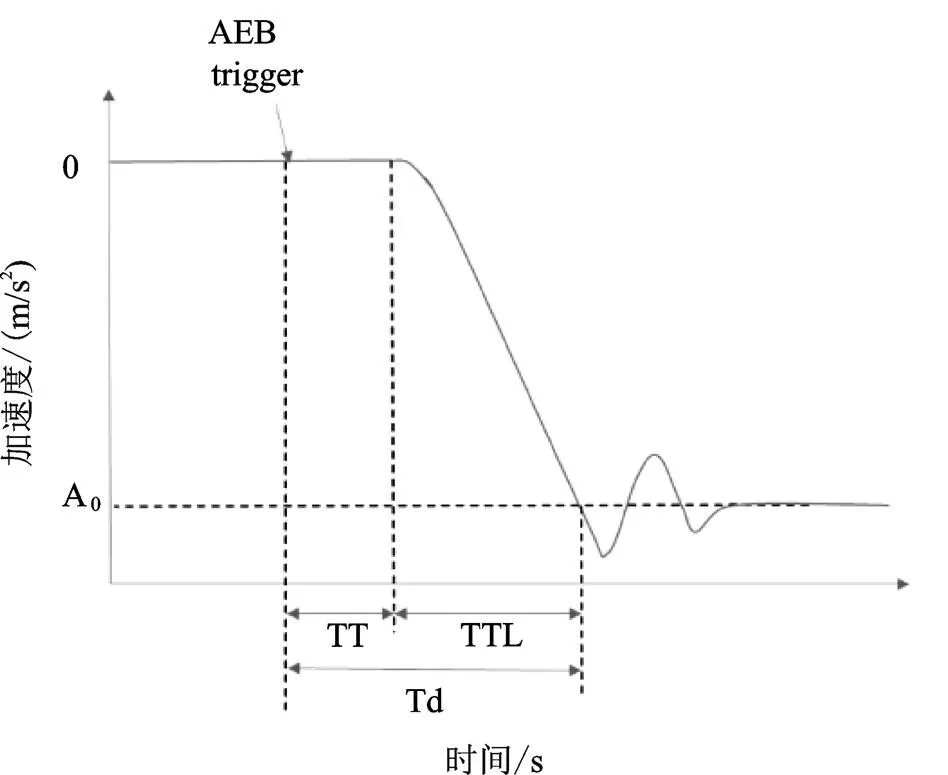
图2 AEB制动过程时序示意图
制动响应时间,即ESC系统从接收信号到制动接近抱死或达到-9 m/s2的制动响应阶段的时间,采用液压制动系统的响应时间为0.2~0.9 s[12]。
另外,再引入一个制动响应延迟时间的参数。制动响应延迟时间,定义为从探测系统发出请求到制动接近抱死的时间,即上述的通讯延迟时间+制动响应时间,为整个系统的延迟时间。
实际上不同的车辆,制动响应延迟时间差别比较大,受车辆的类型、重量、制动管路布置及制动类型、ESC电机能力、制动器能力等影响,一般的乘用车其值会在0.3~1 s之间。以江铃公司生产汽车为例,其中制动响应延迟时间为0.3 s左右的多为新能源车,燃油乘用车因系统及成本等约束一般都在0.5 s以上,如福特领睿平均值为0.59 s(对应制动响应时间为0.49 s),而皮卡及轻卡则会更长一些,空载时达到0.8 s以上,有的甚至会在1 s以上。
表2 测试设备列表
设备名称生产厂型号作用及备注 试验车辆江铃汽车福特领睿测试车辆 二轮踏板假车长沙立中CNCAP2021版两轮踏板车测试碰撞目标 转向机器人ADBSR30控制测试车辆方向及车速 踏板机器人ADBCBAR600 差分GPS定位系统OXFORDRT3002定位及测量相对距离、速度
试验设备包括二轮踏板电动假车及其拖拽模块、驾驶机器人、GPS差分定位设备等,具体详见表2。
2 试验场景分析及模拟测试
2.1 标准场景分析
在试验中,二轮踏板车从驾驶员侧匀速横穿,试验车辆匀速行驶,并最终在车辆不做任何措施处理时,车辆中心点碰撞二轮踏板车前轮最前端,如图3所示。
在试验中,需要所有试验项得满分,在30 km/h及40 km/h两个试验场景,要么在碰撞线之前车辆制动并停车,要么提前制动并让二轮踏板车先穿行后车辆再通过;50 km/h及60 km/h的试验场景,要么在碰撞线前速度降超过20 km/h后以较低车速碰撞二轮踏板车,要么提前制动并让二轮踏板车先穿行后车辆再通过。因实际使用场景中,肯定不期望以任何车速发生碰撞,故不对车速降20 km/h以上的情况做分析计算及模拟测试,只对完全刹停或二轮车穿过而发生避撞的情况分析。下文将针对如上述的4个场景的不同结果进行模拟分析,并得出其进入AEB制动时的TTC时刻点及需要提前多远系统开始发送制动请求。
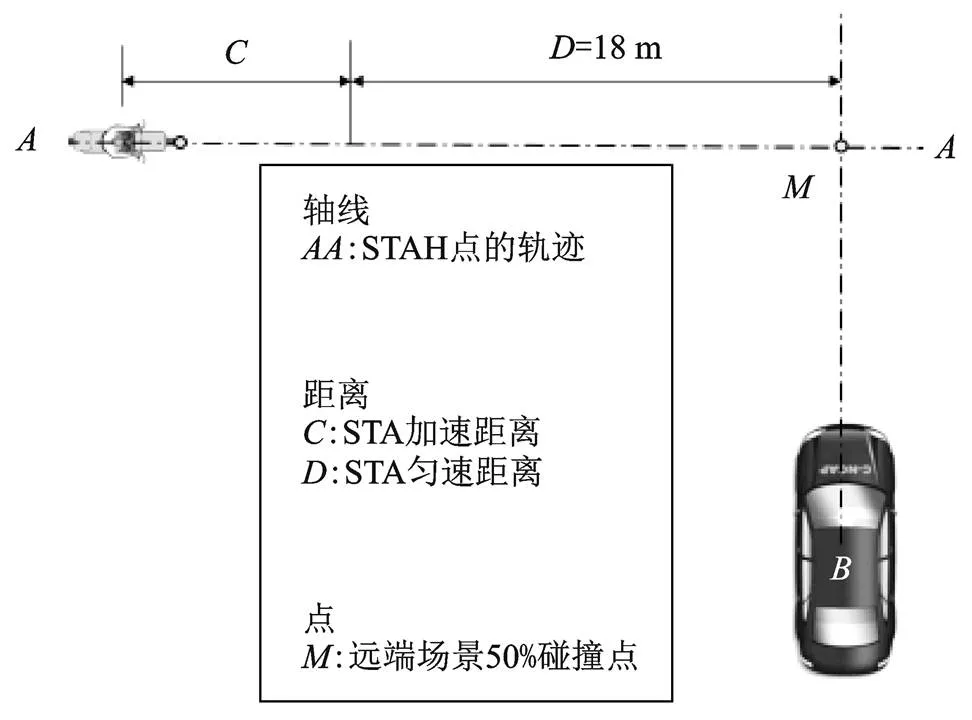
图3 二轮踏板车自动紧急制动场景示意[13]
先计算分析在碰撞线之前,车辆已经刹停或速度降超过20 km/h的情况,按如下公式并将其相关的信息代入:

将式(1)变形转换成:

式中,为制动响应时间;0为AEB制动平稳阶段的减速度平均值,前文0取-8.5 m/s2;1为车辆经过碰撞线时的车速,即碰撞车速。按标准要求,30 km/h与40 km/h的两个试验场景该值为0 km/h,50 km/h试验场景该值为30 km/h,60 km/h试验场景该值为40 km/h,方能得满分。0为制动响应完成时的车速,即制动响应阶段及平稳阶段切换点时的速度,对应上图2中TD的车速。

再根据上述的计算,可以计算提前制动的距离:
式中,V即为响应制动阶段的任一时刻的车速。该式可以做一些变化以简便计算,如文献[14]中的推导及式(8)。
V=+At(5)
式中,A为响应制动阶段的任一时刻的加速度值,其值可由式(6)得到:

再根据的定义,可得到车辆的碰撞时间1:
按上述的公式,代入对应场景的数据及江铃福特领睿的制动响应延迟时间参数,可以得到如表3所示的车辆碰撞时间及提前制动距离1的结果。
表3 碰撞线之前刹停的TTC1与S1值
试验车速V/(km/h)TTL时间/sAEB过程时间T/s提前制动距离S1/m碰撞时间TTC1/s 300.31.236.140.74 0.491.336.870.82 11.588.731.05 400.31.5610.010.90 0.491.6511.010.99 11.9113.571.22 500.31.8814.791.06 0.491.9816.051.16 12.2319.331.39 600.32.2120.471.23 0.492.3122.001.32 12.5625.991.56
如果车辆制动时间较长,在未达到碰撞线之前,二轮踏板车就已经穿过了车辆行驶区域,车辆与二轮踏板车也不会产生碰撞,也是满分。这种情况下,车辆触发AEB制动时到达碰撞线的时间,与未触发AEB制动时到达碰撞线时间的差值1,大于二轮踏板车穿行车辆行驶区域的时间2。
1=-1(8)
乘用车辆的车宽一般在1.6~2 m之间,考虑到一定的安全余量,此处取车宽=2 m。按CNCAP的要求,二轮踏板车的长度=1.72 m。
式中,2为二轮踏板车的行驶速度,即20 km/h;计算得到二轮踏板车穿行时间2=0.49 s。
表4 二轮踏板车提前穿行的TTC1与S1值
试验车速V/(km/h)TTL时间/sAEB过程时间T/s提前制动距离S1/m碰撞时间TTC1/s 300.31.226.140.74 0.491.326.870.83 11.548.721.02 400.31.389.870.89 0.491.4710.870.98 11.6913.381.20 500.31.5114.201.02 0.491.6015.451.11 11.8318.641.34 600.31.6319.061.14 0.491.7220.561.23 11.9624.431.46
如果1大于2,则说明二轮踏板车已经穿行过去;否则,则说明车辆已经到达碰撞线而二轮踏板车未完全穿行过去而产生了碰撞。重新计算表3的结果,将1=2代入后,再次计算、1及1值,与表3的结果取小值,即为车辆得满分实际需要的AEB制动时间,更新如表4所示。
对比表4与表3可以看出,所有场景下,按表3的时间触发AEB,都可使二轮踏板车先穿过行驶区域后车辆才到达碰撞线的。故所有的场景所需的时间,都可以进一步降低至表3中的值。
2.2 标准场景试验模拟
根据上述的分析计算,按表4中为0.59 s的(即为0.49 s)要求写入领睿的AEB控制器中,作为之后试验时AEB的触发值。然后按文献[3]的要求进行试验准备,再进行AEB对二轮电动踏板车的测试,每个车速测试5次,记录数据及结果,如图4所示。对未发生碰撞情况,通过GPS测量二轮踏板假车通过碰撞区域时,车辆与碰撞线的距离;或者在发生碰撞情况下,测试车辆刹停时离碰撞线的距离,并用负数表示。

图4 对二轮电动踏板车的AEB模拟测试
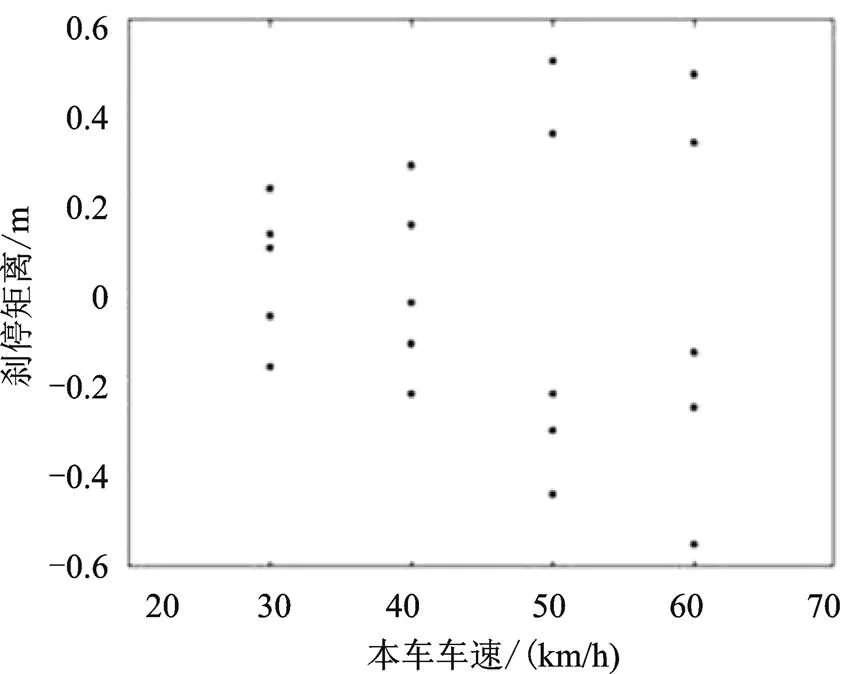
图5 测试结果-刹停距离
从结果来看,上述的分析计算与测试结果相符,结果如图5所示。各车速场景的刹停距离平均值都接近0 m,与理论分析计算基本相符。
3 实际道路场景分析
3.1 道路场景分析
在车载AEB系统识别到二轮车(包括二轮踏板电动车、二轮跨骑电动车等)的前提下,实际道路场景与试验场景的最大差异在于二轮电动车穿行时车速会变化,如在电动车发现车辆时会有提前减速以避让车辆;极少数时也会出现二轮电动车先减速但同时发现车辆也减速且车速较低后,二轮车主发现危险解除,再匀速或加速并以期望提前通过车辆行驶区域。
实际道路场景中,不考虑车辆的行为下,有以下几种二轮车横穿正碰的情况:二轮车很早就发现了车辆,并提前减速后停止于车辆行驶区域前,避让行车辆,让车辆先行通行;二轮车初始时未发现车辆,并保持匀速行驶,随后发现车辆后,或减速或来不及减速,最终与车辆发生碰撞;二轮车保持匀速或略微减速行驶,并通过车辆行驶区域后,车辆才到达碰撞线。实际中二轮车与车辆还有斜切碰撞等情况[5],与CNCAP场景有较大差异,下文不做分析论证。实际中,第一种与第三种场景是最多的,即未发生事故,发生碰撞事故的占极少数。
横穿正碰的场景,后两种分别对应上文中试验场景的在碰撞线之前刹停或二轮车提前穿行的场景的要求,可直接套用测试场景相对应结果及AEB触发的时间要求,下文对第一种情况做分析计算。
市面上的电动车,因结构、制动器磨损程度、胎压等不同,制动能力有较大的差异,其中最低要求为GB 17761电动自行车安全技术规范中规定的,前后闸一起平均减速小于-3.44 m/s2,其对应的制动距离0分别为7 m[15];最高的实际可达到甚至小于-9 m/s2。本文取-8.5 m/s2,按制动响应时间0.2 s算[16],不考虑二轮车上人员的反应时间的情况下,按式(4)算约为2.36 m,基本与文献[17-18]对应。对应CNCAP2021版中的测试二轮车穿行速度车速5.56 m/s(20 km/h),假设二轮车提前减速并在车辆行驶区域前停止,分别计算制动时刻2:

2=0.50(11)
代入二轮车的制动距离0,即可计算出二轮车提前减速的时间2,如表5所示显示二轮车不同制动距离下的提前制动时间2。
从表5结果显示,如果取最好的刹车性能,并以最大的能力制动,二轮车只需要提前碰撞0.60 s 制动即可,比表4车辆的1所有值都要短些。即表明,如果车辆以在CNCAP对二轮踏板车的所有试验场景得满分的策略及时间,原封不动地运用于实际道路上,往往会出现二轮车晚于车辆AEB触发的时刻点制动,但停止在了行驶区域之前不会与车辆碰撞,而车辆却早早地进入AEB制动并带来不好的体验,加大误制动的概率。
表5 二轮车制动停止于车辆行驶区域外的TTC2及S2值
二轮车的制动距离S0/mTTC2/s提前制动距离S2/m 2.360.603.36 71.408
3.2 道路场景试验模拟
按表4及表3中的参数调整AEB控制器的触发时间参数,按表5中的2.36 m的制动距离设置二轮踏板假车的相关运动参数,使二轮踏板假车在碰撞区域前停止。同样按文献[3]的要求进行试验准备,再进行AEB对二轮电动踏板车的测试,每个车速测试5次,记录数据及结果。
测试发现,所有的场景都是车辆先触发AEB,二轮踏板车后制动减速;除了自车车速为30 km/h的场景,在其他车速的场景时,车辆都会在AEB制动一段时间后中断AEB制动请求,图6为各场景下车辆穿过碰撞线时的车速(即中断AEB时的车速)。

图6 二轮车刹停在安全区时车辆的车速
从上述分析及模拟测试结果看,CNCAP的试验毕竟是实际道路场景的模拟简化,AEB系统如果只考虑使用全力的AEB制动及CNCAP满分TTC的参数而不做实际道路场景分析及区分,针对二轮车穿行,AEB系统在实际道路中,其适用性及客户体验不会太好。AEB系统在针对实际道路场景时,需要根据实际的复杂情况细化场景中车辆及二轮车的各种参数及二轮电动车驾驶行为,以提高二轮电动车场景中,车辆触发AEB的客户体验,如过滤部分会出现误制动的情况,或同时采用一些策略如分级制动等。
同时,从上述的分析也可以得出,针对二轮车横穿甚至其他场景,车辆驾驶员不能完全依靠FCW、AEB等驾驶辅助系统,应在发现可能存在危险时,主动鸣笛、降速、让行等操作,排除危险。
4 结论
1)分析CNCAP中AEB对二轮踏板车的试验场景,结合车辆的制动特性及相关响应延迟参数,得出了满分通过试验的要求下,AEB系统触发的碰撞时间值。
2)根据满分通过试验的AEB系统触发所需要的碰撞时间,进一步结合实际二轮电动车的碰撞冲突场景与二轮电动力制动性能,得出针对二轮车穿行,AEB系统在实际道路中,其适用性及客户体验不会太好。AEB系统在针对实际道路场景时,需要根据实际的复杂情况细化场景中车辆及二轮车的各种参数及二轮电动车驾驶行为,以提高二轮电动车场景中,车辆触发AEB的客户体验。同时,车辆驾驶员应主动鸣笛、降速、让行等操作,排除危险。
[1] HULSHOF W, KNIGHT I, EDWARDS A,et al.Auto- nomous Emergency Braking Test Results[J].Enhanced Safety Vehicles,2013(5):1-13.
[2] 佐思汽车研究.2020年中国乘用车主要ADAS功能装配数据年报[R].2021-01-18.
[3] 中国汽车技术研究中心有限公司.C-NCAP 管理规则(2021年版)[S].天津:中国汽车技术研究中心,2021.
[4] 中国汽车技术研究中心有限公司.C-NCAP主动安全研究[S].天津:中国汽车技术研究中心,2021.
[5] 罗俊任,张道文,张友,等.汽车VS二轮车十字路口事故场景研究[J].汽车电器,2021(4):26-30,33.
[6] 李霖,朱西产,刘颖,等.涉及骑车人的典型交通危险场景[J].同济大学学报(自然科学版),2014,42(7): 1082-1087.
[7] 周华,张巧玉,母尧尧,等.十字路口乘用车与二轮车典型危险场景聚类及推演[J].中国安全科学学报,2020,30(4):100-107.
[8] 中国汽车技术研究中心有限公司.C-NCAP测评通知及评价结果列表[Z/OL].https://www.c-ncap.org.cn.
[9] 郭风虎,钱宇彬,汤苏敏.轿车-电动两轮车事故中AEB系统关键参数优化[J].农业装备与车辆工程, 2020,58(1):34-38.
[10] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.智能运输系统车辆前向碰撞预警系统性能要求及测试规程:GB/T 33577[S].北京:中国标准出版社,2017.
[11] 杨良坤,靖苏铜,陈传阳,等.不同车型FCW试验中TTC安全时间阈值分析[J].交通节能与环保,2019,15 (2):16-17,76.
[12] 刘建平,郑望晓,郑阳.AEB系统性能与碰撞时间关联性研究[J].汽车技术,2018(8):51-53.
[13] 中汽研汽车工程研究院有限公司.C-NCAP 管理规则(2021年版)[S].天津:中汽研汽车工程研究院有限公司,2021:30.
[14] 戴志诚,孙刘杰.车辆防碰撞路侧预警模型的研究[J].农业装备与车辆工程,2020,58(7):38-44.
[15] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.电动自行车安全技术规范: GB 17761—2018 [S].北京:中国标准出版社,2018.
[16] 陈东,刘梦洋,徐朋朋,等.电动自行车整车制动检测平台的仿真研究[J].机械设计与制造,2021(2):121-125.
[17] 段福斌,潘双夏.电动自行车制动性能检测的研究与实践[J].机电工程,2004(6):20-22.
[18] 何烈云,傅李罡.电动自行车滑动附着系数实验测量与分析[J].中国人民公安大学学报(自然科学版), 2020,26(2):36-40.
Analysis & Verification Test for AEB to Two-Wheel Electric Bicycle Test of CNCAP 2021
ZHAN Houshun, LUO Huaping, YUAN Ying, DENG Jing
( Jiangling Motors Company Limited, Nanchang 330001, China )
January 1st 2022, the standard CNCAP 2021 edition has implemented, and there is a Chinese unique scenario test that autonomous emergency braking (AEB) to two-wheel electric bicycle. Based on the requirement of the test, and combined the character of the vehicle brake system, analyzed and calculated the requirement of full score of the test, and produced the result of the AEB trigger TTC. And then verified the TTC by real vehicle test. Accorded the TTC and AEB trigger strategy, and combined the collision scenario of the two-wheel electric bicycle and vehicle, and the character of the two-wheel electric bicycle brake system, furtherly produced the result form analysis and test that, it doesn't fit very well that use the strategy and TTC of AEB in the real road scenario. It needs more meticulous strategy based on the complex scenario of the character of the vehicle and the two-wheel electric bicycle and the operation of the two-wheel electric bicycle, to improve the customer experience of AEB system.
CNCAP2021; Two-wheel electric bicycle; Autonomous emergency braking; Real road scenario
U467.1
A
1671-7988(2023)10-40-07
10.16638/j.cnki.1671-7988.2023.010.008
詹厚顺(1983—),男,硕士,工程师,研究方向为辅助驾驶开发、设计、标定等,E-mail:hzhan@jmc.com.cn。
