北斗卫星反射信号岸基海面高度反演精度的评估
2023-06-10张云赵乐久孟婉婷秦瑾盛志超杨树瑚
张云,赵乐久,孟婉婷,秦瑾,盛志超,杨树瑚,*
(1.上海海洋大学 信息学院,上海 201306;2.上海海洋大学 上海海洋智能信息与导航遥感工程中心,上海 201306;3.上海航天电子技术研究所,上海 201109)
北斗卫星 导航系 统(Beidou navigation satellite system,BDS)是中国自主设计研发的卫星导航系统[1],伴随着全部卫星的发射组网,为全球导航卫星系统反射测量(global navigation satellite system reflectometry, GNSS-R)技术提供了新的机遇。
GNSS-R 技术可利用GNSS 的反射信号与直射信号之间的差异进行水面或海面高度的反演[2],现有方法主要包括码相位延迟测高[3-6]、载波相位延迟测高[7-14]、信噪比测高[15]、时延-多普勒(delay-Dopplor map,DDM)测高[16-17]等。岸基GNSS-R 海面测高相对于机载和星载平台,具有稳定性强和精度高等特点,是研究测高模型及评估测高精度的基础。对于BDS,现有岸基研究已经完成了基于码相位延迟测高、信噪比测高和载波相位延迟测高的高度反演实验。在码相位延迟测高方面,文献[6]首次使用北斗卫星B1I 信号,在浙江大洋山海域,成功反演了海面高度,精度达到亚米级。在载波相位延迟测高方面,文献[13-14]分别利用北斗地球同步轨道(geostationary equatorial orbit, GEO)卫星和倾斜地球同步轨道(inclined geosynchronous orbit, IGSO)卫星B1I信号进行反演,精度可达厘米级,长时间的连续数据符合潮位变化的趋势;文献[15]利用北斗B2a 信号进行水面高度反演实验,在30 s 非相干积分时间下反演精度达到5.9 cm。
综上所述,目前关于BDS 反射测量(BDS-R)信号,特别是利用BDSB3I 信号进行海面测高方法和反演性能分析的研究较少,缺少必要的实验成果及精度分析。北斗B3I 码作为新一代信号,与北斗B1I码载波调制方式相同,波长和抗干扰性相近,采用载波相位延迟测高方法理论上精度应处于同一等级;但其相较于B1I 码,码片宽度更窄,理论上DDM测高方法可以获得更加精确的测高精度。
本文在山东省威海市山东大学威海分校附近海域,使用双频BDS-R 接收机,利用岸基北斗B1I/B3I 双频段直射和反射信号数据,在实验当天风速波动约7~11 m/s 的条件下,开展DDM 和载波相位延迟高度反演实验,将测高结果与实测同比数据对比,对两者由于信号特性产生的测高精度差异进行实际验证,系统分析了不同测高方法的北斗B1I 和B3I 信号的海面高度反演性能。
1 岸基BDS-R 海面高度反演原理
1.1 北斗B1I/B3I 信号结构
BDS 采用L 波段右旋圆极化(right-hand circular polarization, RHCP)信号,由I、Q 两个支路的测距码和导航电文正交调制在载波上构成B1、B2、B3 信号[18]。北斗B1I 和B3I 信号对比如表1 所示。

表1 北斗B1I 和B3I 信号对比Table 1 Comparison of Beidou B1I signals and B3I signals
北斗B1I 和B3I 信号均采用BPSK 调制,B1I 信号带宽为4.092 MHz,标称载波频率为1 561.098 MHz;B3I 信 号 带 宽 为20.46 MHz,标 称 载 波 频 率 为1 268.52 MHz。B1I 信号的伪码速率为2.046 MHz,码片宽度为0.489 µs,约为150 m;B3I 信号的伪码速率为10.23 MHz,码片宽度为0.098 µs,约为30 m。
1.2 岸基海面高度反演模型
卫星反射信号为经过反射面反射后到达接收机的信号,相对于直射信号存在路径延迟[19]。假设反射面(海面)为水平,不考虑地球曲率,构造岸基BDS-R 海面高度反演模型,如图1 所示。
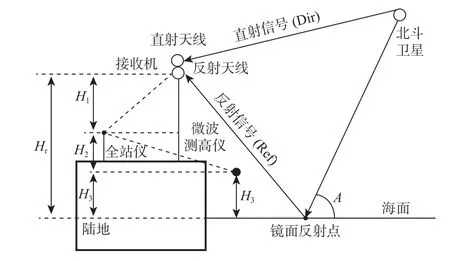
图1 岸基BDS-R 海面高度反演示意图Fig.1 Schematic diagram of shore-based BDS-R sea surface height retrieval
反射天线到海面的高度为Hr,北斗卫星与接收机之间的直射延迟为 Dir,在海面上的反射信号延迟为 R ef,有
式中:Delay 为北斗卫星与接收机在海面的反射信号相对于直射信号的路径延迟;c为光速。
可得出反演海面高度Hr,measured为
式中:A为镜面反射点的BDS 卫星仰角。
1.3 DDM 高度反演原理
DDM 中的时间延迟可用于描述反射信号相对于直射信号的延迟关系。图2 为本次BDS-R 接收设备输出的B1I 频段和B3I 频段的DDM(含15 组多普勒频偏,每组频偏具有48 路延迟相关)。
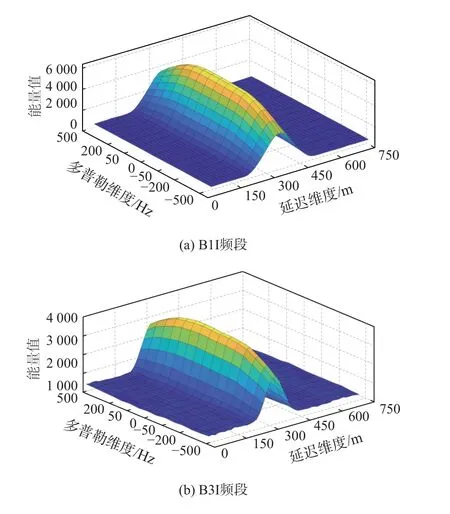
图2 B1I 频段和B3I 频段生成的DDM 相关功率图Fig.2 DDM correlation power diagram generated by B1I and B3I frequency bands
在岸基实验中,由于接收机固定,利用时延一维功率谱实现海面高度反演。由于接收机距离海面较近,以北斗B3I 信号为例,在时延一维功率谱中,反射信号波形能量最大值相对于直射信号波形能量最大值的延迟距离(约0.15 个码片宽度)小于波形跟踪窗口宽度(时延维度距离,约7 个码片宽度),因此,直射信号自相关峰与反射信号互相关峰均落在波形跟踪窗口内。
基于DDM 的高度反演,首先通过计算直射信号PRN 码自相关峰与反射信号PRN 码互相关峰的码相位延迟来计算路径延迟[20]。分别提取B1I 频段和B3I 频段DDM 中多普勒维度为0 的时延一维功率谱切片,如图3 所示。由于北斗B3I 信号单个码片的分辨率较高,其时延一维功率谱中延迟维度的精度更高。对比图3 中的横轴可以看出,在波形跟踪窗口内的B3I 频段跟踪窗口宽度(约250 m)远小于B1I 频段跟踪窗口宽度(约750 m),在进行延迟距离的计算时,理论上可以获得比北斗B1I 信号更精确的结果。
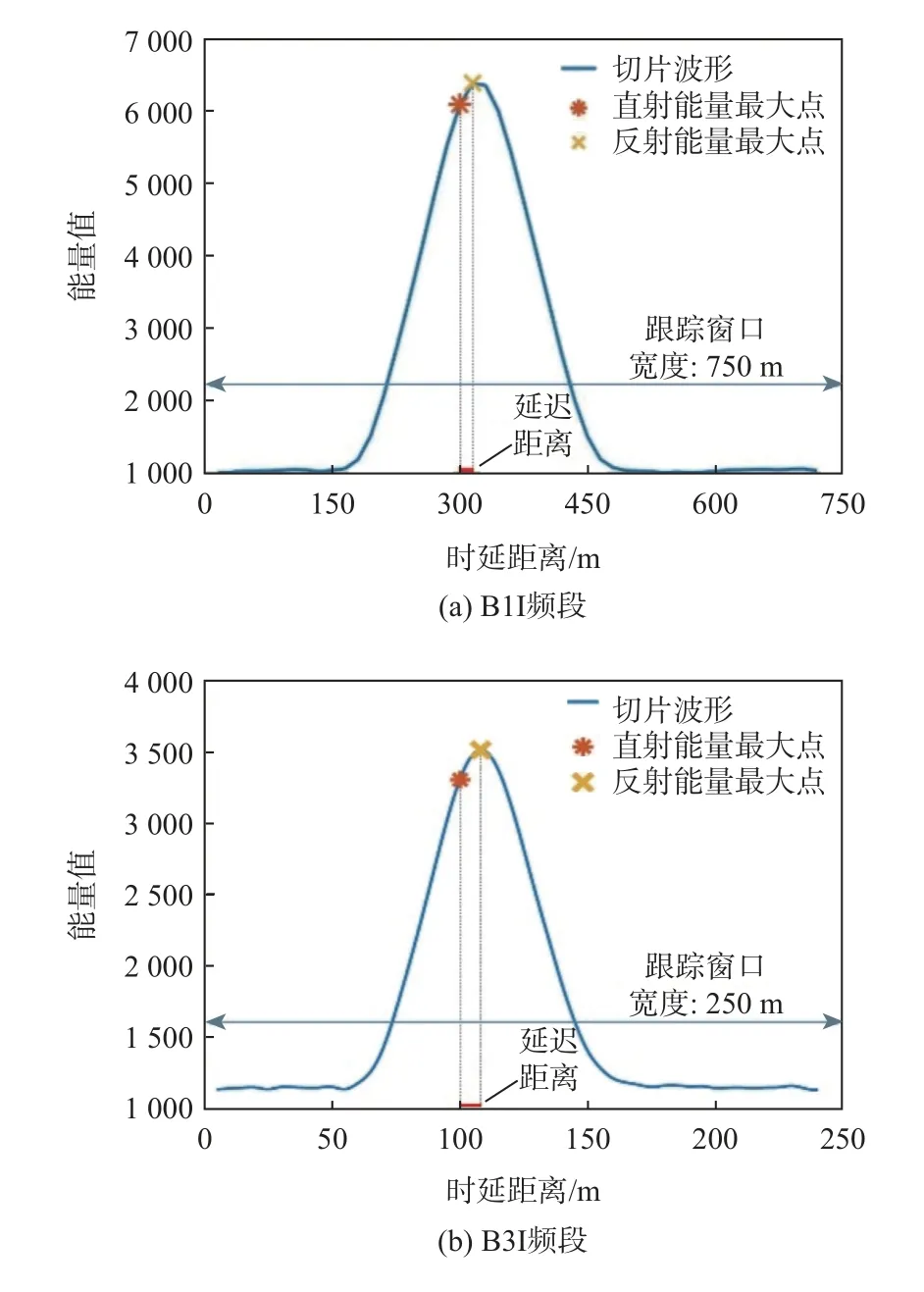
图3 B1I 频段和B3I 频段DDM 多普勒维度为0 的时延一维功率谱切片Fig.3 Slice of B1I and B3I frequency bands DDM time-delay one-dimensional power spectrum when Doppler is 0
反射信号能量最大值为DDM 多普勒维度为0 切片中峰值所对应的位置(见图3),计算该切片中峰值能量对应的延迟距离(Delaymax),将其与直射信号能量最大值(见图3)所对应的延迟(Delaydir)做差,可以得到两者的距离差(Delaycorr),即为反射信号与直射信号的延迟距离[21]。结合式(1)与式(2),可得反演后的接收天线距离海面的高度Hr,measured。图4 为基于DDM 测高方法的岸基BDS-R 海面高度反演方法流程。
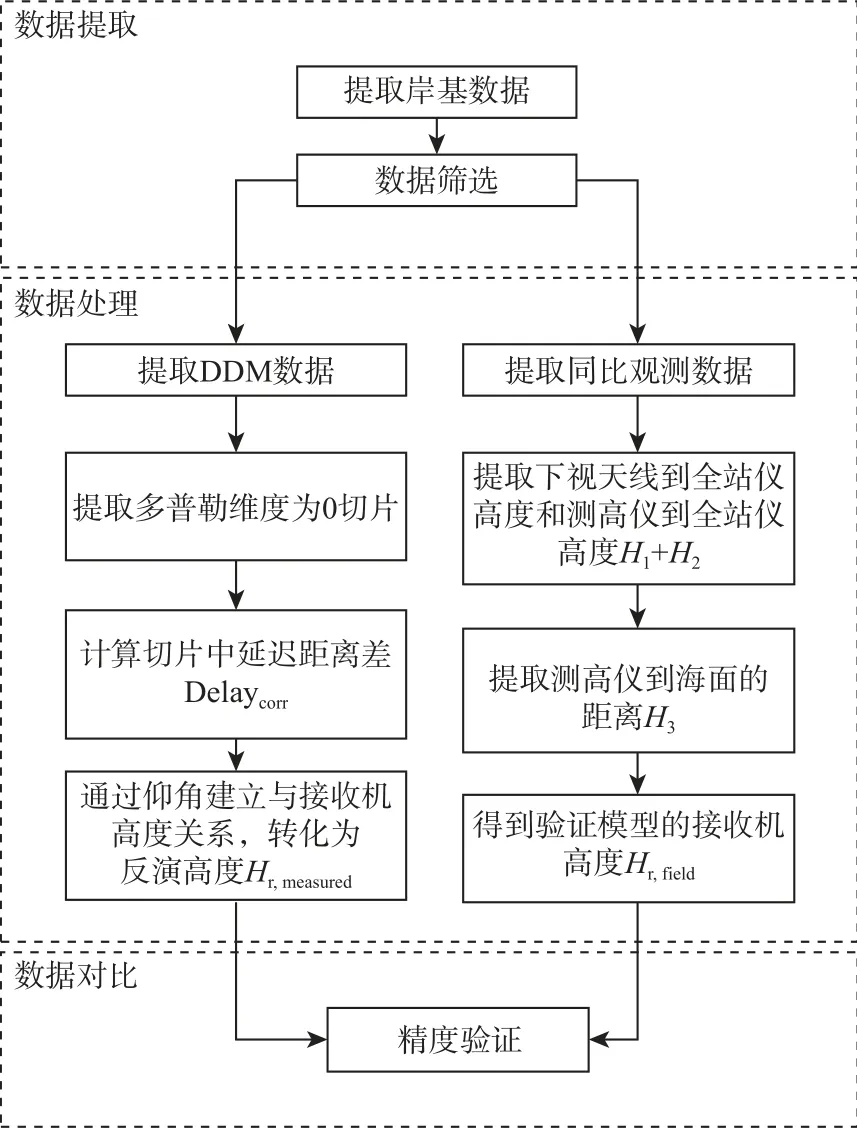
图4 岸基BDS-R DDM 海面高度反演方法流程Fig.4 Flow chart of shore-based BDS-R DDM sea surface height retrieval method
1.4 载波相位延迟高度反演原理
基于BDS 混合星座的设计,对于不同轨道类型的卫星,可将载波相位延迟高度反演方法分为GEO相位测高方法[13]和IGSO/MEO 相位测高方法[14],本文实验采用北斗IGSO/MEO 卫星的B1I/B3I 信号数据。以北斗B3I 信号为例,对数据处理流程进行说明。
软件接收机利用锁相环对采集的原始数据进行处理,使输入信号与本地载波的相位差逐渐趋于收敛,实现相位的稳定跟踪[22]。
经过接收机跟踪后得到的原始数据,每1 ms 获取一组相干结果。图5 为经过跟踪后,选取中心时延lag,生成的直射/反射相关IQ 功率波形(1 200 ms),即直射信号场Ed和 反射信号场Er。将Ed和Er结合,构造相干复数场CI,提取相干相位观测量 φI。
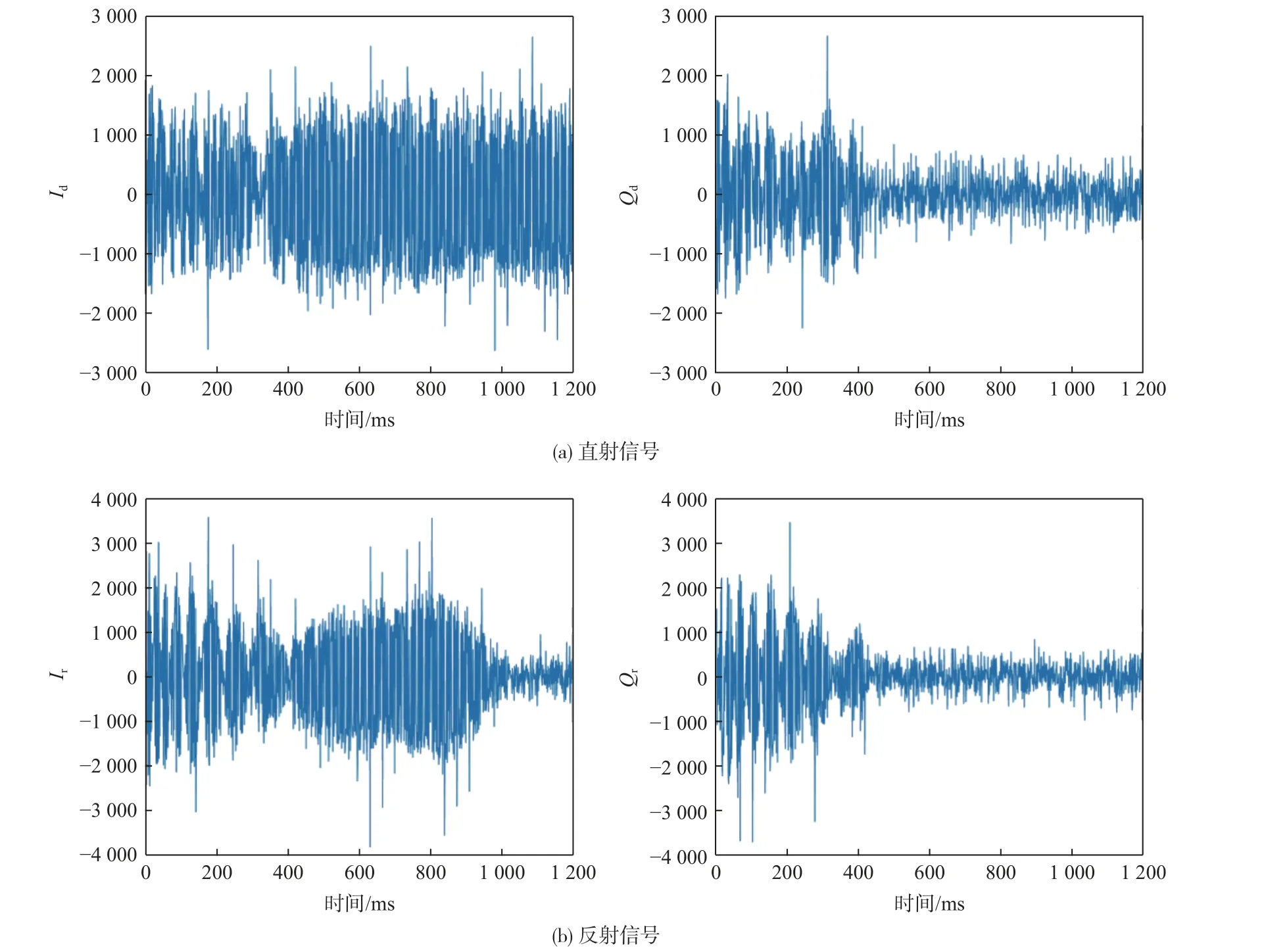
图5 B3I 频段直射和反射I、Q 相关支路波形Fig.5 Waveforms of I and Q related branches of direct and reflection in B3I frequency band
不同时间段内接收天线到海面的垂直高度Hr,measured可 以通过 φI与 干涉路径延迟 ρI计算得出。对Hr,measured进行首次估计,将实验开始时通过微波测高仪测得的高度值作为首次估计值,表示为H~r,measured,两者之间存在高度变化量 ∆H。将H~r,measured与不断变化的卫星仰角 θ构造路径延迟的估计值ρˆI,与连续的相位观测量 φI生成剩余干涉相位∆φI。图6 显示了B3I 频段岸基反演获得的150 s 的码延迟和相位延迟。可以看出,相对于伪码延迟,相位延迟具有非常高的精度。

图6 B3I 频段码延迟和相位延迟对比Fig.6 Comparison of code delay and phase delay in B3I frequency band
对获得的剩余干涉相位进行高频噪声滤波、平滑处理,通过相位解缠解除相位的缠绕现象。经处理过的∆φI进行最小二乘线性拟合,可求得剩余干涉相位的斜率m。
式中:∆ϕI,N为连续时间区间内的剩余干涉相位;θˆN为第N秒的卫星仰角读数。
式(3)中计算得出的解向量x,包含常量a和剩余干涉相位的斜率m,m与 高度变化量 ∆H存在如下关系:
式中:λ为载波波长。
将 ∆H与理论估计高度值H~r,measured相加,得到接收机距离海面的反演高度Hr,measured,如下:
图7 为基于载波相位延迟方法的岸基BDS-R海面高度反演方法流程。

图7 岸基BDS-R 载波相位延迟海面高度反演方法流程Fig.7 Flow chart of shore-based BDS-R carrier phase delay sea surface height retrieval method
2 岸基BDS-R 海面测高实验
2.1 实验场景
2020 年9 月7 日在山东省威海市山东大学附近海域(37°32′2.483 9″N, 122°2′44.154 4″E)进行岸基BDS-R 海面高度反演实验,表2 为实验相关参数。

表2 实验相关参数Table 2 Experimental parameter
图8 为本文实验场景,在栈桥上架设用于接收北斗卫星直射/反射信号的探测天线和接收设备。直射天线和反射天线的垂直高度为5.45 m,反射天线倾角为42°,天线架设朝向为南偏西200°。DDM数据采集时间区间为2020 年9 月7 日08:18—10:41(LT),原始中频数据采集时间区间为2020 年9 月7 日08:18—10:13(LT)。

图8 实验场景Fig.8 Experimental scene
2.2 实验相关配置
实验采用的硬件为上海航天电子技术研究所设计制造的微型BDS-R 接收机,由左旋圆极化(left-hand circular polarization,LHCP)下视相控阵天线、宽波束RHCP 上视天线和硬件接收机3 部分组成,设备能够同时接收和处理北斗B1I/B3I 信号,同时双频段的设计可以有效消除电离层误差。
实验的其他主要器材为手持GPS 定位接收机、全站仪、微波测高仪、手持便捷式测风仪等。手持便携式测风仪每间隔0.5 h 进行一次风速监测并记录(风速单位:m/s)。
全站仪分别测量直射天线、反射天线和测高仪的相位中心,计算获得天线相位中心与测高仪之间的距离;微波测高仪实时获取海面与高度计之间的距离。如图1 所示,将全站仪与接收机反射天线相位中心的距离记为H1,全站仪与微波测高仪之间的距离记为H2,微波测高仪测量的实时海面高度记为H3,有
验证模型高度Hr,field为实测的接收机反射天线到海面的实时高度,作为本文实验的同比数据,用于验证DDM 测高方法反演结果Hr,measured(见式(2))和载波相位延迟测高方法反演结果Hr,measured(见式(5))的精度。
表3 为手持便携式测风仪测得的实验当日的风速数据(约15 min 采集一次),整个数据采集过程中风速维持在较高状态,后段时间(09:11—10:33,LT)较前段时间(08:13—09:11, LT)风速出现了较大幅度的上升。
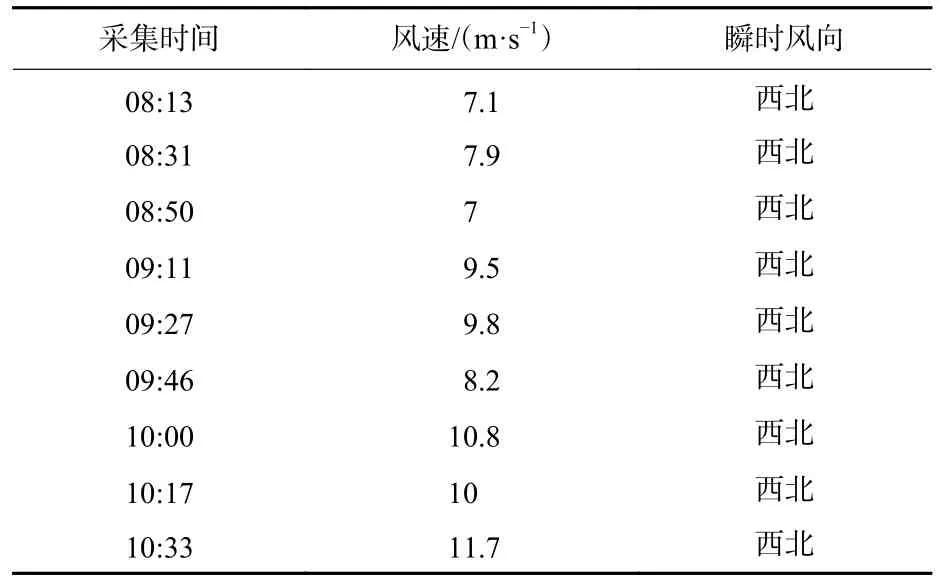
表3 实验风速数据Table 3 Experimental wind speed data
2.3 卫星数据筛选
图9 显示了实验当天07:00 时刻所选取实验卫星的天顶图和仰角变化图(07:00—11:00)。岸基实验中,由于直射/反射天线位置固定,高度不变,且反射天线方向固定朝向海面,根据天线波束角范围,确定接收卫星方位角范围为110°~290°(以天线朝向的方位角为中心加减90°),即图9(a)的白色明亮区域。由于低仰角卫星信号受到多径效应,海面粗糙度和观测噪声等的影响较大,为确保接收信号的质量,选择仰角范围高于30°的北斗IGSO 和MEO 卫星,本文实验选取C10(IGSO)卫星、C13(IGSO)卫星、C19(MEO)卫星和C22(MEO)卫星。图10 为实验卫星的镜面反射点移动轨迹。在DDM高度反演过程中,由于反射信号的接收特性,镜面反射点在信号传播过程中受到障碍物影响,会出现明显偏离轨迹,投射在陆地(见图10 中灰色栈桥区域)的情况,导致接收到的DDM 观测波形产生明显异常,需对相应的数据进行筛除。此外,在载波相位延迟高度反演过程中,结合上述筛选策略,还需对软件接收机中捕获到的卫星信号强弱进行判断,筛选信噪比较高卫星进行反演。
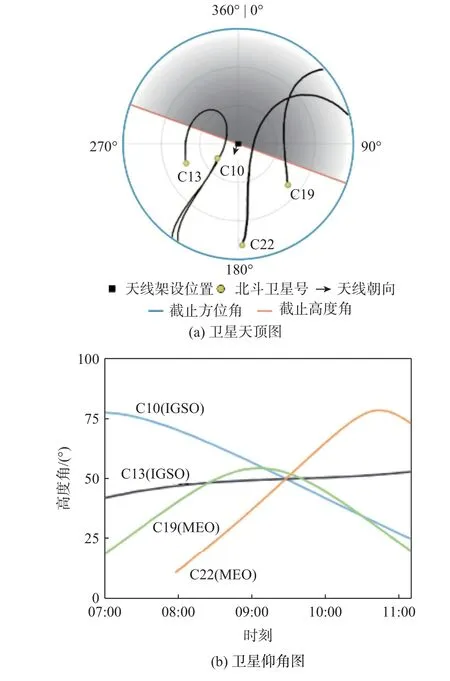
图9 实验卫星天顶图和卫星仰角图Fig.9 Experimental satellite zenith and elevation angle
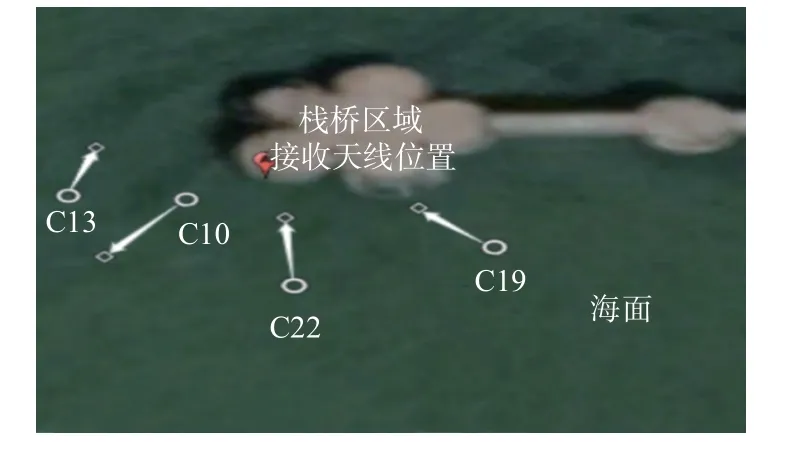
图10 镜面反射点移动轨迹Fig.10 Movement trajectory of specular reflection points
3 海面高度反演结果与分析
3.1 B1I/B3I 双频段DDM 反演结果
LHCP 下视天线同时接收北斗B1I 和B3I 的反射信号,通过硬件接收机生成相关DDM 输出文件(4 通道采集,输出间隔1 s)。将全部DDM 数据经过信噪比筛选及异常波形的筛除后,选取符合条件的DDM 切片进行反演。
图11 为利用2.3 节筛选方法获得的4 颗卫星的DDM 数据,根据DDM 测高方法,分别在B1I 和B3I 频段进行海面高度反演的结果。由于硬件接收机的数据处理机制,部分连续时间段内跟踪处理的并非同一颗卫星。例如,在时间区间09:00—09:45(LT)中,硬件接收机间断处理C10 和C13 卫星,导致卫星反演获得的DDM 数据反演结果不连续。此外,结合2.3 节卫星数据的筛选机制,将不符合镜面反射点等相应筛选标准的数据,予以筛除,故图11中出现部分数据空置的情况。
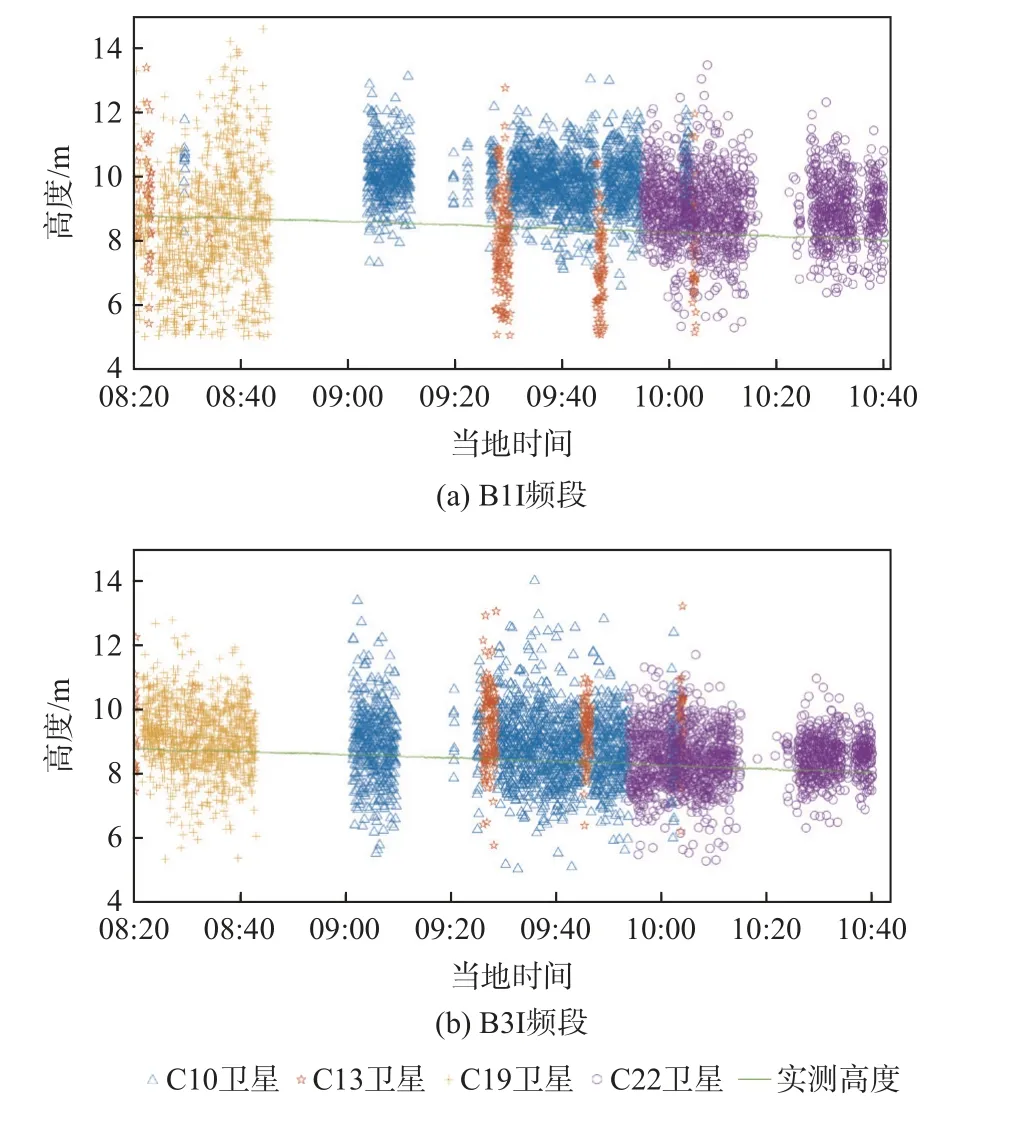
图11 2020 年9 月7 日08:18—10:41(LT)时刻C10、C13、C19、C22 卫星B1I 和B3I 频段DDM 反演与同比数据对比结果Fig.11 Comparison of B1I and B3I frequency bands DDM retrieval results and measured heights of C10, C13, C19 and C22 satellites at 08:18—10:40 September 7, 2020 (LT)
图11 中实线为实验同比数据,本文实验采用平均绝对误差(mean absolute error, MAE)和均方根误差(root-mean-square error, RMSE)作为评价指标验证海面反演精度。将DDM 测高方法反演结果与同比数据对比,精度验证结果如表4 所示。
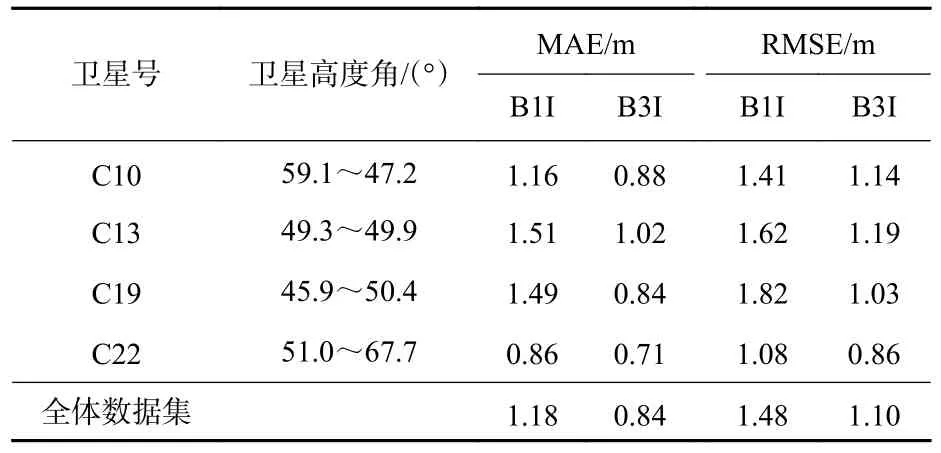
表4 DDM 测高方法B1I 和B3I 频段卫星精度分析Table 4 DDM height measuring method for B1I and B3I frequency bands accuracy analysis
3.2 B1I/B3I 双频段载波相位延迟反演结果
在原始数据采集过程中,每6 min 获取一组数据。由于反射面具有较大粗糙度,以及硬件接收机本身引起的噪声,为避免剩余干涉相位波形的失真,需对接收机在信号捕获过程中的门限值进行合理设定,对接收机处理获得的相位观测量进行判断,筛选出信噪比较高的数据进行反演。
图12 为利用筛选卫星的原始数据,根据载波相位延迟测高方法,在B1I 和B3I 频段进行海面高度反演的结果。图12 中实线为实验同比数据,在08:24—10:07的观测区间内,B1I 和B3I 频段数据基于载波相位延迟测高方法的精度验证结果如表5所示。

图12 2020 年9 月7 日08:55—10:07(LT)时刻B1I 和B3I频段载波相位延迟反演与同比数据对比结果Fig.12 Comparison of B1I and B3I frequency bands carrier phase delay retrieval results and measureed heights at 08:55—10:07 September 7, 2020 (LT)
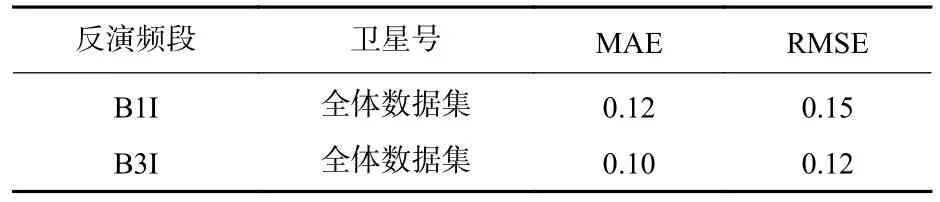
表5 载波相位延迟测高方法B1I 和B3I 频段卫星精度分析Table 5 Carrier phase delay height measuring method for B1I and B3I frequency bands accuracy analysis m
3.3 测高结果分析
在实验当天总体维持较高风速的情况下,利用08:18—10:41(LT)观测时段区间内的DDM 数据进行了海面高度反演,通过分析表4,得出如下结论:B1I 频段全体卫星数据集得到的每秒反演结果与实测数据的MAE 为1.18 m,RMSE 为1.48 m,B3I 频段全体数据集得到的每秒反演结果与实测数据的MAE 为0.84 m,RMSE 为1.10 m。B3I 频段相较B1I频段,反演的MAE 提高了0.34 m,RMSE 提高了0.38 m,具有更为精确的反演结果,验证了1.4 节的理论分析。
对于单颗卫星的反演结果,C22 卫星(BDS-3)相 较 于C10(BDS-2)、C13(BDS-2)和C19(BDS-2)3 颗卫星,BDS-3 反射信号的海面反演精度最优,原因可能是BDS-3 卫星的数据完整率与信噪比均高于BDS-2,同时系统偏差等方面优于BDS-2 卫星[23]。但是由于实验缺乏更多的BDS-3 卫星和BDS-2 卫星对比结果数据集,不能对BDS-3 卫星和BDS-2 卫星之间的反演精度差异展开更加全面的分析。
对于载波相位延迟反演,实验每6 min 可以获得一组反演结果,相较于先前开展的海面高度反演实验[14],在时间分辨率上有了较大幅度提升。对08:24—10:13(LT)时间区间的C19 和C22 卫星B1I/B3I 双频段数据进行分析,从表5 中得出结论:在载波相位延迟海面测高实验中,B1I 频段数据反演结果与同比数据的MAE 和RMSE 分别为0.12 m 和0.15 m,B3I 频段数据反演结果与同比数据的MAE和RMSE 分别为0.10 m 和0.12 m。与DDM 测高方法相比,载波相位延迟测高方法反演结果更加精确,总体维持在较高水平(厘米级)。
从结果上看,B3I 频段精度略优于B1I 频段,但并不明显,这主要是由于两者载波调制方式相同,波长相近,抗干扰性大致相同,没有DDM 测高方法中由于信号特性所导致的对反演精度起到较大影响的差异性因素。
此外,由于载波相位本身的特性,对反射面的镜面性要求较高,实验当天受到7~11 m/s 的海风及海潮的作用,海面粗糙度较大,数据反演结果存在一定误差。结合图11 和图12 进行分析,在实验前半段08:00—09:00(LT)的时间区间内,风速的测量值维持在7 m/s 左右,海面相对平静,载波相位反演结果与实测高度值较为接近;在实验后半段09:00—10:30(LT)的时间内,风速呈现一定程度的上升趋势,最高可达11.7 m/s,反演结果受到风速影响,与实测数据出现了一定程度的偏离,这一现象在B1I 和B3I 频段载波相位延迟高度反演结果中均得以体现。由于实验风速非实时动态测量,没有进一步定量评估风速数据对实验精度的影响。实验结果证明了利用北斗B3I 信号在较高时间分辨率下(6 min)进行高精度载波相位延迟海面高度反演的可行性。
4 结 论
本文利用北斗B1I 和B3I 信号双频段的原始中频和DDM 数据,采用2 种BDS-R 海面高度反演方法,于2020 年9 月7 日在威海开展了约2 h 的岸基实验,从信号特性和反演方法2 个维度评估了反演性能,得到如下结论:
1)采用DDM 海面高度反演方法时,由于B3I信号具有比B1I 信号更窄的码片宽度和分辨率,在时延一维功率谱上具有更加精细的延迟分辨率。B3I 频段反演结果的MAE 和RMSE 分别为0.84 m和1.10 m,相较于B1I 频段,MAE 提高了29%,RMSE提高了26%。
2)采用载波相位延迟海面高度反演方法时,由于B3I 信号载波调制方式与B1I 相同,波长和抗干扰性相近,B3I 频段和B1I 频段的反演结果相较于同比数据的MAE 和RMSE 分别为0.10 m、0.12 m和0.12 m、0.15 m,B3I 信号的反演精度略优于B1I信号。
3)北斗卫星B1I 和B3I 频段的数据都能够有效地用于岸基海面高度反演,B3I 频段的数据整体表现优于B1I 频段。
4)DDM 海 面 高 度 反 演 方 法 的 精 度 在1 m 左右,但其对信号质量的要求不高,能够适应不同的海面状况;而载波相位延迟海面高度反演方法的精度在10 cm 左右,但其对数据的质量要求较高,海面风速和海潮的变化都可能影响反演结果甚至影响载波信号的连续接收导致无法反演。在一般风速(7~11 m/s)下,能够实现较高时间分辨率(6 min)的高精度载波相位延迟高度反演。
本次实验受到环境限制及天气的影响,时间共持续了不到 3 h,缺少实时的动态环境数据,因此,只定性分析了其中风速变化因素对反演精度的影响,对于精确的定量评估分析,将在今后的实验中进行进一步探究。同时在未来将开展结合DDM 和载波相位延迟海面高度反演方法的优势,实现适应性更广的高精度海面高度反演研究。
致谢 感谢北京航空航天大学的杨东凯教授和王峰博士,以及上海航天电子技术研究所的周勃高级工程师对反射信号接收机及反演模型方面提供的建议,感谢山东大学的高凡博士对本次实验提供的帮助。
