基于物联感知的检修作业全过程安全管控技术研究
2023-06-09赵晓东朱何荣
赵晓东,朱何荣
(南京南瑞继保电气有限公司,江苏 南京 211102)
0 引言
变电站防误系统是防止变电站检修操作过程中电气误操作的必备技术手段。现有变电站防误系统能有效防止变电站运行检修作业人员的误操作,避免事故与人身伤害的发生,但仍然存在以下问题:a)误入带电区域:变电站现有防误系统缺乏监测带电区域的有效手段,实际检修运维操作过程中操作人员由于各种原因,误入带电区域引发的人身伤害事故时有发生;b)设备离线导致误操作:离线设备的状态没有纳入到变电站自动化系统的监视范围内,当电脑钥匙操作打开机械锁具后无法根据自动化系统采集的一次设备位置信息确认一次设备是否已经到位,容易造成离线设备操作后因无法实时监视从而有可能造成误操作导致人身伤害;c)检修隔离缺乏技术关联:通过“工作票+现场安全隔离”来确保检修现场的作业安全,缺乏刚性技术措施制约,存在误向检修设备送电的风险;d)带临时接地线合开关:地线状态未纳入自动化系统监视,检修作业完成后,由于检修人员疏忽等原因接地线未拆除,直接进行送电操作,导致线路直接接地的恶性事故[1-4]。
本文针对现有变电站防误系统存在的不足,结合UWB(Ultra Wideband)高精度定位、LoRa(Long Range Radio)无线通信等物联感知技术,设计了一套在线式智能防误系统,进一步提升了变电站系统防误能力。实践证明,通过自动规划出安全工作区及操作隔离面,闭锁检修区域设备远方操作权限,以操作过程中对操作人员及生产设备的高精度定位,以及操作过程信息的实时信息交互,可以有效增强变电站检修作业操作全过程中的人员及生产安全性。
1 物联感知技术介绍
1.1 UWB定位技术介绍
UWB是一种新型无载波无线通信技术,无需载波调制而是利用纳秒至微秒级的脉冲传输数据,脉冲带宽覆盖3.1 GHz~10.6 GHz,极宽的带宽使得UWB 能够在短距离范围内实现数百Mbit/s 至数Gbit/s 的数据传输速率,在定位测距中能够达到分米级的定位精度[5-11]。
UWB 定位技术常采用三边定位算法,通过测量UWB脉冲信号到达参考节点的传输时间,根据圆周模型计算三者交叉点实现目标的定位。
如图1 所示,A1、A2、A3 是3 个参考节点,R1、R2、R3 是移动节点到参考节点的距离,基于圆周的定位模型的原理是根据移动节点(如图1中M)到达多个参考节点(基站,如图1 中A1、A2、A3)的测量距离,可以形成多个圆周,通过计算圆周的交点即可以估计出移动节点M的位置。

图1 UWB定位方式示例Fig.1 Example of UWB positioning method
UWB采用占空比极小(1%)的脉冲进行传输信息,脉冲持续时间0.2 ns~1.5 ns之间。无需载波调制、功率放大等信号处理,因此仅需要很小的发射功率就能实现通信,这大大延长系统电源工作时间,无载波窄脉冲通信的特点使得UWB具有极强的穿透能力和多径分辨能力等特点,具有抗干扰能力强、定位精度高、多径分辨能力强等特点,适合复杂环境下的高精度定位。
1.2 LoRa通信技术介绍
LoRa是一种低功耗广域网通信技术,基于线性调频扩频调制,保持了像FSK(Frequency-shift keying,频移键控)调制相同的低功耗特性,具有前向纠错(FEC)能力,实现了低功耗和远距离的统一,为用户提供了一种简单的能实现超远距离的大容量无线传输方案,在同样的功耗下比传统的无线射频通信距离扩大3~5倍。
LoRa 网络主要由终端(LoRa 模块)、网关(或称LoRa基站)、站端(或云端)等部分组成,实现应用数据的双向传输,具有远距离、低功耗、多节点、低成本的特点。在有遮挡物的情况下,传输距离仍然可以达到上千米;传输速率从几十到几百kbps。
LoRa采用星状拓扑(TMD组网方式),网关星状连接终端节点,但终端节点并不绑定唯一网关,相反,终端节点的上行数据可发送给多个网关。理论上来说,可以通过Mesh、点对点或者星形的网络协议和架构实现灵活组网,如图2所示。

图2 LoRa组网示例Fig.2 Example of LoRa networking
2 检修作业安全管控系统设计
2.1 系统架构
针对现有变电站防误系统存在的不足,结合UWB高精度定位、LoRa 无线通信等物联感知技术,设计了一套在线式智能防误系统,在现有变电站防误系统基础上,增加了人员及工器具实时定位、电脑钥匙实时在线、智能地线头实时在线以及检修隔离等功能,进一步提升了系统防误能力,实现了检修作业全过程安全管控,增强了人员及生产安全性[12-13]。在线式智能防误系统包括防误主机、电脑钥匙、通信适配器、无线网关、无线基站、定位标签、地线管理控制器、地线检测闭锁机构、智能地线头、五防锁具,以及检修隔离适配器、检修隔离钥匙、检修隔离锁具等。电脑钥匙、智能地线头、定位标签基于无线通信,与防误主机实时交互信息,具体架构图3所示。

图3 系统架构图Fig.3 System architecture diagram
2.2 系统功能
2.2.1 人员管理
智能防误系统根据操作票信息自动生成安全工作区,借助定位技术形成电子围栏,采用主动式防误技术,通过在管理系统设置虚拟电子围栏,可实现“越界预警、滞留预警、长时间静止预警”等功能,防止人员误入带电间隔、防止检修人员误出安全边界、检测检修人员与监护人员安全距离等[14-18],如图4所示。

图4 人员管理示例Fig.4 Example of personnel management
针对变电站运维的巡视管理,在巡视路线上设置虚拟边界,巡视人员一旦离开巡视区域,便可通过各种报警方式提醒平台和巡视人员,确保安全巡视。
针对倒闸操作、带电检测、消缺等业务,均可设置虚拟安全区、危险区等虚拟电子围栏实时监控、提醒,确保人员安全。
2.2.2 工器具管理
针对变电站运维班的安全工器具等重要设备可以配置资产标签、定时监测归位情况以及使用情况。随着国家电网有限公司逐步加强运维班作为最基层战斗单位的作用,这些重要的设备和工具将会越来越多。
例如,临时接地线与两票操作的配合,在变电站检修操作执行过程中,如果操作有误,例如接地线出现在不应该出现的区域;在两票操作完成情况下,接地线未归位到工具室等,各种异常下均可报警提示操作人员。
2.2.3 紧急救援
当检修作业过程中发生意外事故(火灾、爆炸等)或者人身伤害等紧急情况时,时间就是生命,能否第一时间得到有效救援至关重要。检修作业人员通过随身佩戴的定位卡片上的“一键求助”可以进行及时求助,此时定位系统软件进行声光报警并第一时间通过短信或微信通知相关人员,并可结合定位系统快速锁定报警人员位置,实现快速救援。
2.2.4 历史追溯
基于UWB定位技术,可随时查看被定位目标在某一时段的历史轨迹,在防误系统监控主机实现直观的回放,比如查看不同巡视人员、在某区域的停留时间等数据,一旦发生突发情况,可通过历史轨迹查询来实现事件追溯。
2.2.5 实时在线
电脑钥匙具备无线通信功能,在进行检修作业时,电脑钥匙离开通信适配器后,通过LoRa无线通讯网络保持与防误主机实时数据交互,实时回传电脑钥匙的操作信息至防误主机,由防误主机根据电脑钥匙操作信息以及本次操作相关设备状态变化情况判断后续操作步骤条件是否满足,并将判断结果通过LoRa无线实时传输至电脑钥匙。当出现相关设备状态变化导致防误系统判断出电脑钥匙操作条件不满足时,也可借助无线通讯自动闭锁电脑钥匙的操作权限,防止出现误操作[19-22],实时操作校验过程如图5所示。
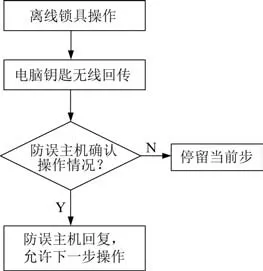
图5 实时操作校验过程示意Fig.5 Schematic diagram of real-time operation verification process
例如,间隔停电检修过程中,操作人员完成隔离刀闸分闸操作后,隔离刀闸未能正确分开,防误系统检测到隔离刀闸状态错误,闭锁后续接地刀闸操作,并将判断结果实时传输给电脑钥匙,提示操作人员并闭锁电脑钥匙后续操作。传统防误系统电脑钥匙传票后,到现场操作,即使防误系统主机检测到隔离刀闸状态错误,此时也不能闭锁电脑钥匙下一步操作,仅能展示操作步骤,存在安全风险。传统防误系统与智能防误系统对比如图6所示。

图6 防止误分合操作界面展示图Fig.6 Presentation of anti-erroneous switching-on/off interface
2.2.6 检修隔离
依据变电站内一次主接线图及检修操作前设备实时状态,构建异构拓扑网络。根据检修范围通过深度学习技术自动识别关联设备形成隔离面,由运行人员对隔离面设备闭锁,防止误向检修面送电,为检修隔离作业管控提供安全可靠的支撑。
防误主机在形成对应设备操作票后,根据需要操作的对象,在防误主机形成检修工作区以及检修隔离区。现场根据防误主机形成的检修隔离区,采用检修锁具及附件,在检修工作区外围形成一道检修隔离面,如图7圈定区域所示。

图7 防误主机检修隔离面形成图Fig.7 Diagram of maintenance & isolation scope of anti-maloperation host
检修隔离适配器接收到防误主机发送的检修任务后,自动将检修任务与检修授权钥匙绑定,而该检修任务所包含设备的操作权限就被自动“闭锁”,仅当与该检修任务绑定的授权钥匙返回,确认检修工作结束后,才会解除对该检修任务包含设备的闭锁,实现被检修设备操作权由检修人员掌握,保证检修人员安全。
2.2.7 临时地线管理
智能地线管理系统由智能地线管理控制器、地线检测闭锁机构、智能地线柜、智能地线头、智能地线桩、智能网关、无线基站等组成,系统结构如图8所示。

图8 智能地线管理系统架构图Fig.8 Architecture of smart ground wire management system
地线管理控制器通过网络方式与防误主机进行数据交互,上送当前地线状态以及执行防误主机解锁/闭锁命令,实现各个地线检测闭锁机构的统一管理。在进行挂接临时地线的操作任务时,操作人员通过防误主机解锁所选择的临时接地线,其他未被选择的地线则仍处于闭锁状态。
每根临时接地线的智能地线头上安装有对应该地线的RFID识别码片,作为该地线的唯一编码。地线检测闭锁机构安装在智能地线管理柜内,机构上安装有RFID码片识别回路和闭锁机构,当智能地线头挂到检测闭锁机构指定的卡位上时,检测闭锁机构上的RFID码片识别回路即读取到对应的RFID码值,从而识别智能地线身份并能将正确的地线闭锁。当防误主机授权后,检测闭锁机构可以将已闭锁的地线解锁或将还回来的地线闭锁。
当临时接地线挂接到地线桩上或拆除离开地线桩时,智能地线头上的RFID 码片识别电路开始工作,把所挂接或者拆除的地线桩RFID码值通过LoRa无线通信方式传输给防误主机,防误主机获得当前所有接地状态,并直观展示在防误主机的界面上。同时,防误主机根据实时回传的临时接地线状态判断临时接地线挂接或拆除的正确性,以及是否可以进行后续操作,并给出提示,当临时接地线状态不符合要求时,防误主机将禁止下一步操作,从而从根本上解决了临时接地线的错误挂接、漏拆除等难题,采用技术手段杜绝了带临时接地线送电等恶性误操作事故的发生。
3 工程实例
本文提出的基于UWB 高精度定位、LoRa 无线通信等物联感知技术的检修作业全过程管控方案及产品已在多个变电站投入使用,下面以江苏常州110 kV博瑞变电站智能防误系统为例进行介绍。
江苏常州110 kV 博瑞变电站智能防误系统架构如图9所示,左侧虚框实现传统五防系统功能,右侧虚框实现实时高精度定位及电脑钥匙无线通信功能。

图9 博瑞变电站智能防误系统架构图Fig.9 Architecture of smart anti-maloperation system in Borui Substation
大屏幕左侧展示操作票信息及当前操作步骤情况、右侧展示操作人员实时位置信息、下侧小屏幕显示实时视频信息,全面展示操作过程及状态信息,如图10所示。

图10 大屏显示示意图Fig.10 Demonstration of large screen display
防误系统生成操作票的同时根据操作内容自动规划出安全工作区及操作隔离面,形成虚拟电子围栏。现场检修作业过程中,操作人一旦离开规划区域,即会收到主动告警,防止误入非工作区域。同时,操作隔离面以内,检修任务所包含所有设备的远方操作权限均被自动“闭锁”,避免检修作业过程中,误向检修设备送电。
临时接地线加装定位标签,防误系统实时监视临时地线的位置信息,并根据临时地线的位置信息,判断接地线是否拆除,实现开关/刀闸操作闭锁。
电脑钥匙通过无线通信模块与防误主机实时通信,实时回传操作信息并获取各步骤操作结果,防误主机根据相关设备状态的变化确认是否可以继续操作,并将判断结果实时传输给电脑钥匙,实现了设备操作全过程管控。
4 结语
传统变电站防误系统可有效预防误操作,防止人身伤害,但是依然存在误入带电区域、设备离线导致误操作、检修隔离缺乏技术关联、带临时接地线合断路器(隔刀)的风险。
本文提出了基于UWB 高精度定位、LoRa 无线通信等物联感知技术的检修作业全过程安全管控方案,并设计了一套完整的变电站智能防误系统。首先依据变电站一次主接线图及变电站空间位置建模数据,构建异构拓扑网络,根据检修需要自动形成虚拟电子围栏,指定作业范围,闭锁作业范围内所有设备远方操作权限;作业过程中,通过无线通信网络实现高精度室内外定位,实现对操作人员实时定位管控;通过无线网络实现电脑钥匙及智能地线实时在线,保障操作过程实时管控,地线状态实时感知,最终实现对检修作业的全过程安全管控。
现场实践证明,该系统可以有效解决误入带电区域、设备离线导致误操作、检修隔离缺乏技术关联、带临时接地线合断路器(隔刀)的问题,提高变电站检修作业安全可靠性,将检修作业现场安全管理由“被动发现”变为“主动预防”,有效提升变电站安全管理水平。