基于液压控制的密炼机料斗翻转特性影响因素研究
2023-06-08李楚


摘要:传统密炼机料斗翻转由蜗轮蜗杆驱动,粉尘污染极易导致电机负载增大而烧毁或限位开关失灵,存在料斗卡死现象。采用液压缸驱动料斗翻转既可解决该问题,又便于维修。鉴于此,提出了一种基于液压控制的密炼机料斗翻转PID控制系统,对其闭环控制方法进行了分析;基于AMESim搭建了料斗翻转角度控制系统仿真模型,对料斗翻转特性及其影响因素进行了仿真,获得了料斗转动惯量、旋转阻尼和PID微分项系数对料斗翻转启停振动的影响规律。研究结果表明,减小料斗转动惯量、增大旋转阻尼可有效消除料斗翻转振动;料斗旋转阻尼大于400 N·m/(r/min)可有效控制料斗翻转振动;选取微分项系数为0.1时,料斗翻转稳态误差基本消除。
关键词:密炼机;料斗翻转;PID;翻转角度;振动
中图分类号:TQ330.4 文獻标志码:A 文章编号:1671-0797(2023)11-0057-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.11.015
0 引言
传统密炼机料斗翻转力由蜗轮蜗杆提供,机器在密闭空间内长时间工作,极易产生粉尘污染,导致电机负载增大进而严重烧毁电机或出现限位开关失灵现象,影响橡胶熔炼安全、成本和进度。
基于此,对料斗翻转拟采用液压缸驱动代替蜗轮蜗杆传动;为提高料斗卸料率,需精确控制料斗翻转角度,故引入闭环控制技术[1]。结合相关机械翻转理论技术[2-3]和PID调节控制理论[4],本文提出了一种基于角度控制的密炼机料斗翻转闭环控制系统,基于AMESim软件搭建了密炼机料斗翻转角度PID闭环控制系统,研究了基于翻转液压缸角度的PID闭环控制特性,重点分析了基于料斗翻转角度控制特性的影响因素,仿真了料斗转动惯量、翻转阻尼及PID控制器微分系数对翻转角度波动程度的影响,对密炼机料斗翻转装置研制及系统优化设计具有指导意义。
1 基于角度控制的密炼机料斗翻转液压系统
基于角度控制的密炼机料斗翻转机构示意图如图1所示,此时翻转液压缸活塞处于缩回状态,密炼机料斗已翻转卸料。设定密炼机料斗翻转角度为θ。
密炼机料斗翻转角度PID控制液压系统如图2所示[5-8],使用角度传感器及其传输通道构成翻转角度闭环控制液压系统,设定密炼机料斗翻转角度目标值为θ0。
图2中电机带动定量泵工作,泵提供液压缸动作流量和压力,比例换向阀换至左位,液压缸活塞缩回,料斗逆时针旋转卸料;比例换向阀换至右位,液压缸活塞伸出,料斗顺时针旋转至待装料状态。
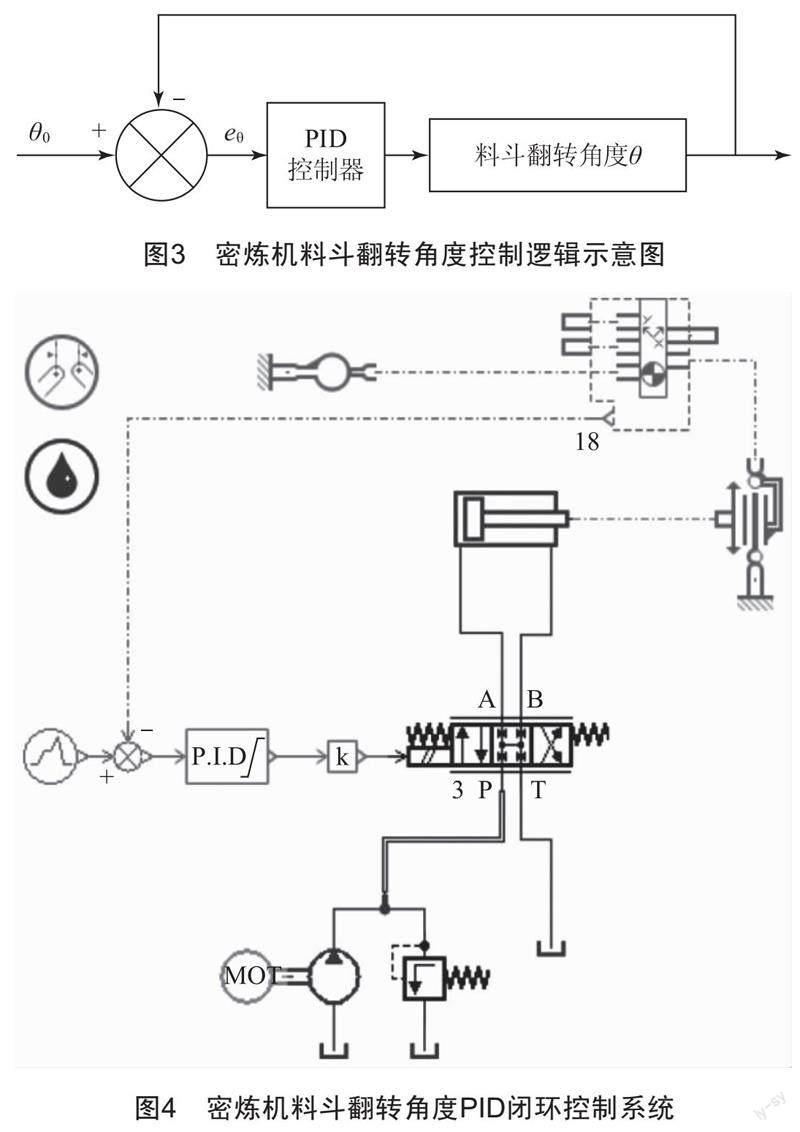
料斗翻转角度闭环控制逻辑图如图3所示。
密炼机料斗翻转角度闭环控制:密炼机翻转液压系统通过角度传感器实时输出料斗翻转角度θ,通过反馈通道到达求和运算器,与其目标角度值θ0比较输出角度误差eθ,eθ传输到PID控制器控制阀芯实时动作,直至料斗翻转角度逼近目标角度值。
2 基于角度控制的料斗翻转液压系统建模
基于AMESim软件的液压库搭建如图4所示的基于角度控制的密炼机料斗翻转闭环控制系统仿真模型,系统仿真参数如表1所示。
3 基于角度控制的翻转控制特性仿真分析
在基于角度控制的密炼机料斗翻转PID闭环控制系统仿真模型中,设置料斗理想目标角度值为132°,输入PID参数值:kp=10、ki=0.05、kd=0.01,时间间隔0.01 s,仿真3 s得到如图5所示的基于角度闭环控制的料斗翻转控制特性曲线,其中图5(a)为基于角度闭环控制的料斗翻转角度及液压缸位移变化曲线,图5(b)为基于角度闭环控制的料斗翻转角速度及液压缸速度变化曲线。
由图5可知,基于翻转角度闭环控制的料斗翻转系统,料斗翻转角度逼近目标值的响应时间约1.6 s,滞后0.2 s,实际料斗翻转角度为132.4°,料斗翻转过程中液压缸活塞缩回速度可达0.44 m/s,滞后位置控制系统0.04 m/s,料斗翻转速度约为11.14 r/min,滞后位置控制系统0.9 r/min,料斗翻转启动和结束时冲击振动严重。
4 翻转特性影响因素研究
通过减小料斗转动惯量消除翻转启停冲击,设置料斗转动惯量分别为20、40、60、80 kg·m2进行基于角度控制的料斗翻转仿真,得到如图6所示的料斗转动惯量对料斗翻转角度的影响。
由图6可知,减小料斗转动惯量对减小料斗翻转角度具有明显的效果。
在实际中可设计料斗形状使其装料重心与旋转铰接点尽可能小,进而减小料斗转动惯量,降低料斗翻转振动。
通过增加阻尼消除翻转启停冲击,设置料斗旋转阻尼为100、400、700、1 000 N·m/(r/min)进行仿真,得到如图7所示的料斗翻转阻尼对翻转角度的影响。
由图7可知,当料斗翻转阻尼为400 N·m/(r/min)以上时,料斗翻转停止波动基本消除。
设置PID控制器微分项系数分别为0.01、0.1、1、5进行仿真,得到如图8所示的PID微分项系数对翻转角度的影响。
由图8可知,增大PID微分项系数,料斗翻转停止冲击逐渐消除,当微分项系数为0.1时,料斗翻转波动得到有效控制。
5 结论
传统密炼机料斗机械翻转驱动力由电机带动蜗轮蜗杆传动装置提供,机器长时间工作会因粉尘污染导致负载增大,进而造成蜗轮蜗杆传动卡死,烧坏电机。针对此不足,采用液压控制油缸提供料斗翻转驱动力,设计了一种密炼机料斗液压翻转角度PID闭环控制系统,对料斗翻转角度、翻转速度、液压缸位移及液压缸速度变化情况进行了仿真,重点研究了基于角度控制料斗翻转特性的影响因素及其规律,对液压控制式密炼机料斗翻转装置研制具有理论指导意义,主要得出以下结论:
(1)减小料斗转动惯量、增大料斗旋转阻尼,料斗翻转振动得到有效控制;
(2)PID微分项系数选取0.1,料斗翻转角度曲线稳态误差较小。
[参考文献]
[1] 石磊,高春生,郭津津,等.翻转机构节能型液压系统设计与分析[J].机床与液压,2017,45(14):90-92.
[2] 王明迪,刘国栋,王正,等.基于PID控制的舱压调节系统设计[J].液压与气动,2019(10):104-108.
[3] 于保军,于文函,李健,等.一种驾驶室翻转液压缸试验台的控制系统设计[J].液压与气动,2018(5):98-101.
[4] 陆志.全自动液压翻转机构优化实例分析[J].液压与气动,2013(12):132-135.
[5] 何刘宇,李运华,卢绍伟,等.模块举升车液压控制系统设计与研究[J].机床与液压,2017,45(15):101-105.
[6] 朱鹏程,吴庆和,陈吉安,等.基于PLC与PID自整定算法的高精度调平系统设计[J].机床与液压,2019,47(17):133-136.
[7] 谢海波,杜泽锋,卢俊廷,等.基于优化函数的PID参数整定技术在液压振动台上的应用[J].液压与气动,2019(2):24-30.
[8] 毛尾,纪朱珂,韦海利,等.电液比例伺服系统模糊PID复合控制应用研究[J].液压与气动,2019(1):95-99.
收稿日期:2023-03-02
作者简介:李楚(1992—),女,江苏徐州人,硕士,助教,主要从事机械设计与液压传动科研教学工作。
