基于ARM9的菠萝采摘机械手设计与应用
2023-06-07杨娜李秀平黎骑强李基有张艳莉
杨娜 李秀平 黎骑强 李基有 张艳莉

摘 要 菠萝品质优异、香气诱人、口感独特,富含大量人体所需的膳食纤维、有机酸、维生素及多种矿物质,营养价值较高,深受消费者喜爱,市场需求量日益增大。菠萝叶带有小锯齿,比较坚硬,人工采摘时常造成工人手部受伤,采摘效率较低;而且容易在采摘过程中损伤菠萝,造成菠萝商品性降低。根据菠萝的结构特点,研究设计了一款菠萝采摘机械手,主要由控制器、剪切刀片、转动销、连杆、转轴电机、可伸缩推杆、控制按钮等组成,搭建了基于ARM9的电机PID调速系统,ARM9输出PWM信号控制电机转速,驱动转动轴电机调整菠萝采摘机械手姿态,驱动可伸缩推杆带动剪切刀片动作,完成菠萝的采摘。该菠萝采摘机械手安全可靠,操作简单,提高了菠萝的采摘效率。
关键词 菠萝;采摘;机械手;结构设计;程序设计
中图分类号:S225.93 文献标志码:B DOI:10.19415/j.cnki.1673-890x.2023.03.062
水果是人们生活中必不可少的食物之一,其中菠萝是营养丰富的热带水果,品质优异、香气诱人,具有口感独特,富含大量人体所需的膳食纤维、有机酸、维生素及多种矿物质等优点[1],营养价值较高,味道酸甜可口,深受消费者喜爱,市场需求量日益增大。菠萝原产在南美洲热带高温地区,目前约有90个国家和地区种植,我国的菠萝种植面积和产量约占世界总量的7%左右[2-3],主要种植地区为广西、云南、广东、海南、福建和台湾等[4]。随着经济的发展和人们多样化消费需求的日益增加,我国菠萝消费量快速增长,伴随北方市场的不断开拓,菠萝市场需求更加广阔,我国的菠萝种植面积与产量也在逐年增长。
采摘是水果生产链条中最耗时、耗力的环节之一。菠萝采摘作业季节性强,劳动力密集,耗时费力,并且费用高,一般只有一个半月左右的收获期,因此保证菠萝适时采收、降低菠萝采摘费用是果农增收的重要途径。我国菠萝植株不仅高度不一,而且密度大,难以用统一的收割方式完成采摘,菠萝一般生长在丘陵或山地环境中,地理环境较为复杂,并且菠萝种植面积广、产量相对较高,普通机械会对菠萝植株造成损伤,成本高昂,菠萝运输车难以进入及自由穿梭作业,容易损伤菠萝托芽,给菠萝的采摘收获带来难题与考验,考虑到菠萝采摘的复杂性,难以大规模采用自动化设备来完成采摘。目前国内绝大部分的菠萝采摘都采用人工方式进行,而菠萝的叶子边缘有很多锋利的锯齿,菠萝果皮坚硬且带有芒刺[5],人工采摘有较高的体力和技能要求,不仅成本高昂,而且有可能划破手指,降低了菠萝采摘效率[6]。面对日益严重的劳动力紧缺和成本快速上涨问题,从多方面考虑,设计了一种菠萝采摘机械手,可以实现菠萝的高效采摘,既能避免采摘人员手部与菠萝的长时间接触,避免手被刺伤,又能提高菠萝的采摘效率。
1菠萝采摘机械手的总体结构设计
1.1 總体结构
设计的菠萝采摘机械手工作时可由工作人员手持[7-8],按下转动轴电机按钮,可以使转动轴电机旋转,调整菠萝采摘机械手的姿态;按下推杆控制按钮,可以驱动可伸缩推杆动作,从而带动剪切刀片动作,剪切菠萝果柄;按下复位按钮,剪切刀片复位;在采摘菠萝的过程中按下停止按钮,采摘中止,通过控制器发送指令驱动电机旋转,从而实现完整菠萝果实的自动化采摘。
菠萝采摘机械手主要由控制器、剪切刀片、转动销、连杆、转轴电机、可伸缩推杆、控制按钮等组成,其大致结构如图1所示[9]。
1.2 工作原理
为了完成菠萝的采摘,考虑到菠萝叶子上有锋利的锐齿,菠萝采摘机械手的设计与人工采摘类似,需要通过菠萝采摘机械手前端的剪切刀片完成菠萝的采摘。该菠萝采摘机械手的剪切原理是通过控制器发送控制指令驱动电机动作,从而实现菠萝果柄的剪断,工作人员手持菠萝采摘机械手,调整其姿态,转动轴电机可以调整将剪切刀片移至菠萝果柄处,可伸缩推杆可以控制连杆实现剪切刀片对菠萝果柄的剪切[10]。
1.3 主要部件设计及功能分析
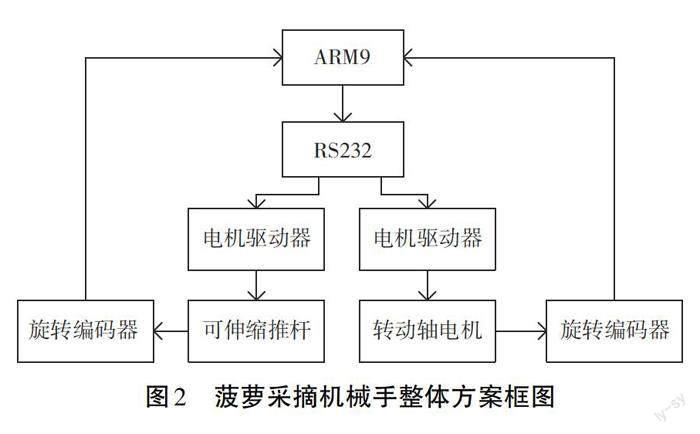
菠萝采摘机械手的整体方案框图如图2所示。在ARM9控制器中实现PID算法,ARM9控制器通过RS232串口发送指令给电机驱动器来驱动直流电机,直流电机附带的旋转编码器测量电机的转速,并且向ARM9控制器输出脉冲,该脉冲作为PID算法的反馈输入,ARM9是电路核心部件,可以驱动菠萝采摘机械手的转动轴电机和可伸缩推杆,实现菠萝采摘机械手电机旋转和可伸缩推杆动作,从而带动剪切刀片动作。
1.3.1 控制器
嵌入式系统体积小、功耗低、成本低,是目前发展较快的信息类技术之一[11],在使用时可以简化整个电路控制系统设计,提高系统的可靠性与稳定性。ARM嵌入式系统可以直接调节输出PWM波的占空比和频率,从而控制电机的运转。ARM嵌入式系统与传统的电路和单片机控制的PWM波形相比,效率、精度更高,响应速度更好,成本更低,功耗较小[12],ARM处理器在操作性能方面具有非常大的优势,是高性价比嵌入式处理器的突出代表,具有非常好的应用前景,目前已经深入到农业、工业控制、电子产品、网络应用等各个领域,将来会应用更加广泛。菠萝采摘机械手的控制器设计使用了基于ARM9的核心处理器,ARM9微处理在高性能和低功耗特性方面性能最佳。
1.3.2 连杆设计
因连杆所在平面与推杆铰接处平面间距离较小,近似为平面四杆机构,当连杆绕转动销转动一定角度时,连杆会带动剪切刀片转动,从而完成对菠萝茎部的剪切。该过程能快捷剪断菠萝茎部,又能保证切口平整,这样可以轻松地将菠萝采摘下来,从而实现菠萝的采摘[13]。
1.3.3 剪切刀片设计
剪切是将菠萝在果柄处剪断,是一个非常重要的动作,菠萝采摘机械手剪切菠萝果实的果柄,可以将果实与植株分离。菠萝采摘机械手完成菠萝果柄的剪断需要刀片配合,采摘机械手最前端装有剪切刀片,剪切刀片的运动形式有两种,一种是刀片既有固定剪,也有活动剪,对菠萝定位精度要求较高,否则会降低采摘效率;另一种是刀片都为活动剪,采摘菠萝时比较灵活,由于菠萝的果柄较短且粗,剪切刀片应该选择合理,如果采用平刃剪切刀片剪切果柄,可能会在剪切过程中出现滑动现象,这样就无法剪断菠萝果柄[14],同时降低菠萝采摘的效率,本设计采用两刀片均为活动剪的锯齿形剪刀片,如图1所示。菠萝采摘机械手中的可伸缩推杆可以控制连杆实现剪切刀片对菠萝果柄的剪切,采摘机械手可以可靠、稳定地完成菠萝采摘。
1.3.4 工艺流程
菠萝采摘机械手能够完成菠萝的采摘,同时避免了对采摘者的伤害,该菠萝采摘机械手工作时需要人工手持,减轻了工作人员的工作量,提高了菠萝采摘的效率,提升了经济效益。菠萝采摘机械手的操作工艺流程如图3所示。
菠萝种植地多为丘陵或者山地,田间的活动空间有限,考虑到菠萝采摘现场复杂的环境及对菠萝的损伤,从目前菠萝果园采摘机械发展的总体情况看,本文设计的菠萝采摘机械手体型合适,机械结构紧凑,可以灵活地在茂密的菠萝地里完成采摘,能降低菠萝果农的采摘作业强度,减少菠萝的损伤,提高采摘效率。
2程序设计
2.1 PID算法设计
在过程控制中,PID(比例P、积分I和微分D)控制是一种最常用的经典过程控制方法,比较容易实现,适用范围广[15],参数选定较为简单,控制参数相互独立,可以满足大多数过程控制的响应性、准确性、稳定性需求,PID控制器也被称为PID调节器,是一种最优控制,其参数整定方式简便,根据不同需求,可以灵活改变其结构,比如PI、PD、PID。为了保证菠萝采摘机械手电机控制系统的稳定性,把比例、积分、微分三种作用组合起来,形成PID调节器,其基本传递函数为:
[u(t)=Kpe(t)+1Tie(t)dt+Tdde(t)dt] (1)
式(1)中,u(t)为控制器输出,e(t)为控制器输入,调整比例系数Kp、积分时间常数Ti、微分时间常数Td,可以使菠萝采摘机械手电机控制系统动静态稳定。
2.2 ARM9程序設计
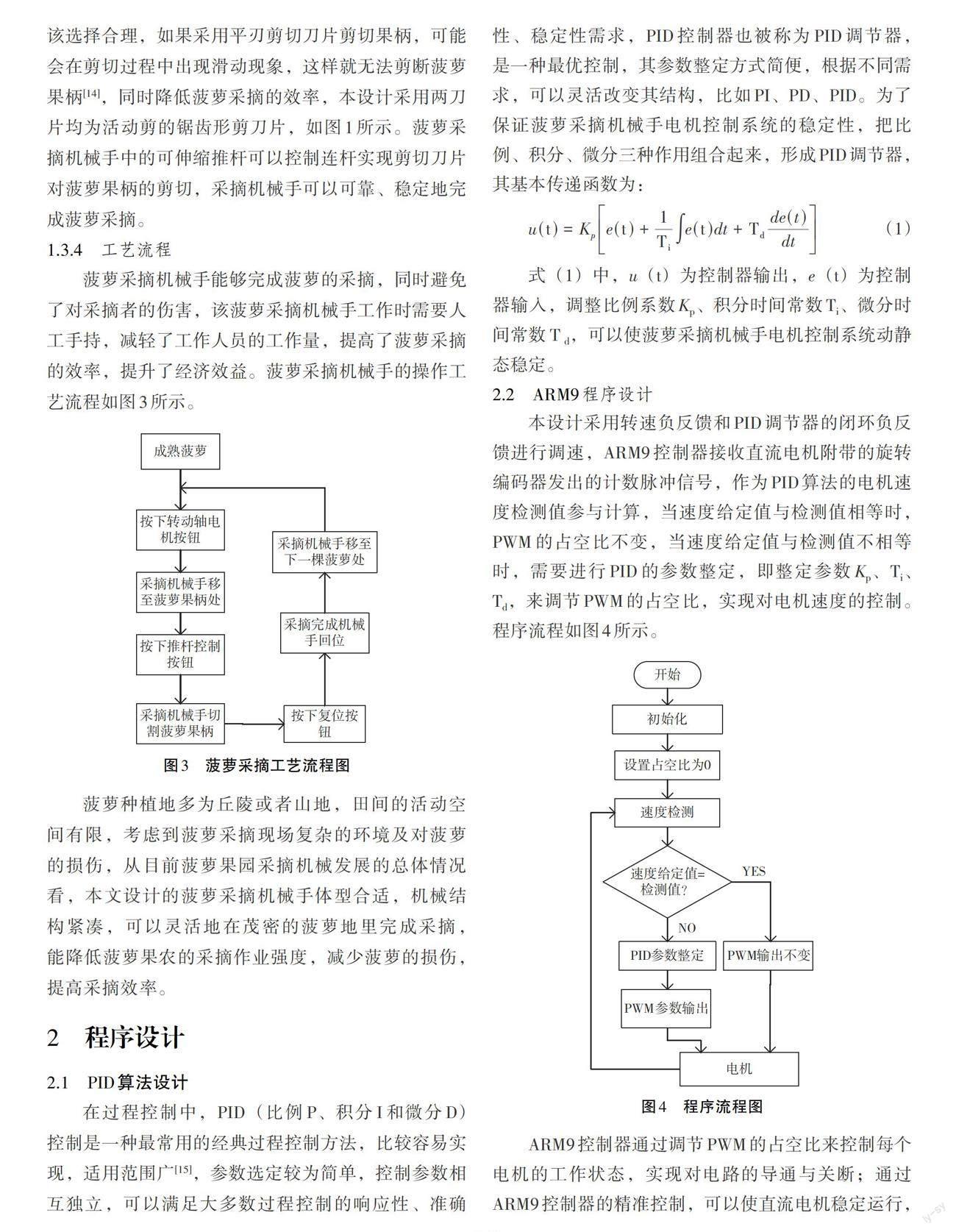
本设计采用转速负反馈和PID调节器的闭环负反馈进行调速,ARM9控制器接收直流电机附带的旋转编码器发出的计数脉冲信号,作为PID算法的电机速度检测值参与计算,当速度给定值与检测值相等时,PWM的占空比不变,当速度给定值与检测值不相等时,需要进行PID的参数整定,即整定参数Kp、Ti、Td,来调节PWM的占空比,实现对电机速度的控制。程序流程如图4所示。
ARM9控制器通过调节PWM的占空比来控制每个电机的工作状态,实现对电路的导通与关断;通过ARM9控制器的精准控制,可以使直流电机稳定运行,转动速度满足运行标准。在实际电机运行过程中,电机的启动、停止和速度控制都由程序定义,如果要实现电机的速度控制,则需要改变PWM信号的占空比,借助菠萝采摘机械手上设置的按钮,可以完成对菠萝的采摘。
3 发展趋势
3.1 便携式菠萝采摘机械手
菠萝种植地的活动空间有限,如果设计的菠萝采摘机械手质量或者体积较大,工作人员在使用过程中会造成不便,严重影响菠萝采摘的效率,因此菠萝采摘机械手在设计时应考虑体型大小、机械结构轻便性,本文设计的菠萝采摘机械手在满足要求的前提下外形尺寸尽量小,质量尽量轻,使用更方便,可以降低生产成本,减少果农的经济负担,提升经济效益。菠萝采摘机械手小型化有利于在茂密的菠萝地里灵活作业,可以进行实时调整与控制[16],便携的菠萝采摘机械手,可以代替原有的人工采摘,又能防止菠萝叶被损害,能有效提升菠萝采摘效率、降低采摘成本,增强了该领域的农用机械控制技术研发实践力度,具备较高的推广应用价值。
3.2 自动化、智能化菠萝采摘机械设备
随着我国农业发展进程不断加快,农业机械自动化技术的应用和推广也在不断地完善,机械化、自动化、智能化水平也得到了进一步提高。由于菠萝成熟后,叶片相互交错,较难通过人工手段完成菠萝的采摘,迫切需要借助自动化、智能化控制手段来实现菠萝的自动化采摘。在实现菠萝自动化采摘的过程中,可以实时监控和准确统计菠萝的采摘角度和采摘力矩[17],自动化、智能化的菠萝采摘机械设备可以利用自动控制系统更精确地计算并灵活调节机械手的位置,以增加菠萝采摘的成功率和降低菠萝果实的损伤程度,尽量避免采摘机械设备损伤菠萝表皮,智能化菠萝采摘机械设备可以更加准确地识别菠萝的外观状态及成熟程度,从而为菠萝的自动化采摘提供精准判断根据[18]。
4结论
随着经济的发展,人们对菠萝的需求日益增加,菠萝市场有很大的发展空间[19],而我国菠萝收获大部分是人工采摘,采摘自动化程度较低,采摘作业复杂,工作量大,费用高,采摘效率低;由于菠萝作物的特殊性,菠萝的叶子边缘有很多锋利的锯齿,果皮带有芒刺[20],人工采摘容易给采摘人员带来伤害。考虑到菠萝生长的自然环境,以及在成熟时的生长状态,从人性化和实用化的角度出发,设计了一种适宜田间作业的菠萝采摘机械手,还可以与休闲农业相结合,增强采摘人员的体验感和趣味性,同时安全可靠,避免了人与菠萝的直接接触,减少各方面因素对操作人员的伤害,大大降低了采摘人员的工作强度,提高了采摘效率,提升了经济效益,采摘过程中菠萝不受损伤,为菠萝自动化采摘机的进一步优化设计奠定了基础[21]。
参考文献:
[1] 邓祥丰.菠萝采摘机关键部件的设计与分析[D].成都:成都大学,2020.
[2] 金琰.我国菠萝市场与产业调查分析报告[J].农产品市场,2021(8):48-49.
[3] 张日红,张权,区建爽,等.自走式高地隙菠萝催花机设计与控制[J].机电工程技术,2022,51(6):18-21.
[4] 邓祥丰,鄢强,陈代玉,等.菠萝采摘机械的研究现状与发展趋势[J].林业机械与木工设备,2019,47(9):4-8.
[5] 张星.菠萝采摘机械手的设计[J].安徽科技,2015(2):50-52.
[6] 杜泽亮,张梅,张伊阳,等.便携式菠萝采摘机械手设计[J].南方农机,2018(23):76.
[7] 李道义,陈雷,尚小龙,等.菠萝采摘机械手结构设计[J].农业工程,2019,9(2):1-5.
[8] 吴沛晟,华京.菠萝采摘机器人的实用化设计[J].兰州工业学院学报,2016,23(3):58-61.
[9] 廖劲威,朱余清,罗阔,等.菠萝采摘机械化的发展探索[J].现代农业装备,2014(5):56-59.
[10] 马兴灶,连海山,弓满锋,等.菠萝采摘机械手结构设计与试验[J].山东农业大学学报(自然科学版),2020,51(4):727-732.
[11] 王亚庭.基于ARM与FPGA的高速数据采集技术研究[D].北京:北京交通大学,2007.
[12] 刘灿伟.基于ARM的直流电机调速系统的研究[D].北京:华北电力大学,2007.
[13] 辛宝英,施俊侠,廖湘湘,等.菠萝采摘机械手结构设计[J].农业技术与装备,2014(7):12-14.
[14] 张西成,张燕.菠萝采摘机械手的设计[J].农机化研究,2014(11):130-132,136.
[15] 杨晨阳,王舒憬,王刚.基于ARM的直流电机控制系统设计[J].自动化与仪器仪表,2011(1):57-59.
[16] 刘子杰,陈海标,王贺莹,等.跨越式菠萝采摘车机械结构设计研究[J].粮食科技与经济,2019,44(3):96-98.
[17] 胡君易.菠蘿采摘机械研究进展[J].农业技术与装备,2021(2):22-23.
[18] 赵华成,姚宁,许赵慧,等.菠萝自动采摘机构的结构设计与有限元分析[J].浙江水利水电学院学报,2020,32(3):67-71,89.
[19] 邓春梅,李玉萍,梁伟红,等.我国菠萝产业发展现状及对策[J].山西农业科学,2018,46(6):1031-1034.
[20] 吴思宇,张雨佳,王一函.菠萝辅助采摘机械臂[J].科技与创新,2019(5):150-151.
[21] 张日红,施俊侠,张瑞华.菠萝自动采摘机的结构设计[J].安徽农业科学,2011,39(16):9861-9863.
(责任编辑:易 婧)