节能环保型小麦精准施肥播种机设计
2023-06-07孙友谊朱雪峰刘炳雷
孙友谊 朱雪峰 刘炳雷

摘 要 小麦机械化播种过程中,拖拉机车轮对土壤的碾压会导致种子播种深度差异较大,严重影响小麦的发芽率和成活率,从而降低小麦产量。针对此问题,设计了一种具有局部旋耕、土壤整平、肥料与种子深度和下播量有机协同且实时调节的小麦精准施肥播种机。为有效保障小麦种植的精准性及有效性,该小麦精准施肥播种机只对拖拉机所压的车辙区域进行旋耕,降低了施肥播种机的动力需求,实现了旋耕节能;通过智能平地仪实现旋耕后的耕地平整;通过施肥播种流量与重量闭环控制系统,实现播种机速度与肥料、种子流动速度的有机协同,精准控制田地的施肥和播种量。
关键词 小麦播种机;局部旋耕;土壤整平;精准控制
中图分类号:S223.2 文献标志码:A DOI:10.19415/j.cnki.1673-890x.2023.03.061
小麦产业发展直接关系到国家粮食安全和社会稳定,小麦的播种方式、播种质量都对小麦产量有重大影响。播种机械是农业机械的重要组成部分,播种机械的播种质量直接影响农作物的产量和质量,因此研制高质量的播种机械是加快实现现代农业的迫切要求。尽管我国大部分地区早已实现播种机械化,但目前播种机械的播种质量仍存在诸多问题。近几年虽出现了精密播种机、精少量播种机等,但只在一定范围内得到推广应用,主要原因是其结构和制造工艺复杂,整机成本高,制造和使用技术要求较高。生产实际中,小麦播种机仅虽可进行条播,但未根据农民现有的农业装备和播种存在的问题进行设计和改进。为针对性提高播种均匀性,本文在现有小麦播种机的基础上进行改进设计,研究节能环保型小麦精准施肥播种机。
1 整机的创新设计
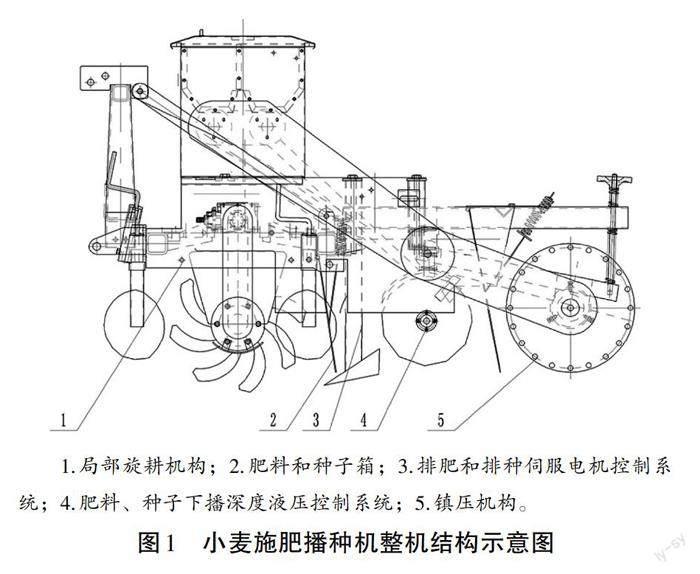
本项目主要从功能方向和技术方向进行设计开发。1)功能方向。施肥播种机围绕旋耕、施肥、播种等功能,实现车辙旋耕系统的节能、施肥量和播种量的闭环控制、施肥和播种深度的自适应调节、施肥与播种过程的状态监测与智能监控。2)技术方向。围绕提高播种质量和规范化种植水平,以精准播种、定向施肥、智能高速为主要目标,研发小麦智能化多功能播种机械,实现种肥分施、同步镇压等一体化作业,具备作业信息采集传输、播种质量智能监控等功能。整机结构如图1所示。
1.1 车辙旋耕系统的节能设计
中小马力拖拉机牵引的播种机无旋耕部分,拖拉机的两轮车辙压实土壤导致车辙区域内播下的种子不能满足播种深度要求,甚至种子未播到土壤中。由于采用拖拉机带动施肥播种机工作,拖拉机车辙处的土壤比其他位置土壤低且坚硬,因此若不进行旋耕,将会严重影响小麦的发芽和产量。车辙旋耕系统由拖拉机动力驱动,通过传动轴、减速机减速带动旋耕轴转动,旋耕轴上两侧各装有多把旋耕刀。旋耕轴是旋耕车辙的关键部件,采用三维仿真和平衡试验相结合的方法确定旋耕轴的技术参数,确保旋耕轴径向跳动最小,使车辙旋耕后达到与之前旋耕机旋耕土壤的高度和松软程度一致。
1.2 施肥量和播种量的闭环控制设计
传统施肥播种机上的种子和肥料下落是以镇压辊的转动为动力,通过链传动分别带动播种轴和施肥轴,播种轴和施肥轴上分别装有若干个槽轮,在槽轮上分别对应装有播种盒和施肥盒,播种盒和施肥盒分别成一排装在种子箱和肥料箱下方,播种轴和施肥轴的转动带动槽轮分别拨动种子和肥料沿管道下落到土壤中。由于镇压辊的转速与拖拉机的行走速度有关,所以播种量和施肥量基本上不能调整。
小麦施肥播种机拟采用两台伺服电机分别带动播种轴和施肥轴,播种轴和施肥轴上的槽轮分别拨动播种盒中的种子和施肥盒中的肥料下落入土壤,伺服电机的转速可与施肥播种机行走速度协调控制,实现播种和施肥的速度控制。拟在播种盒与施肥盒上安装称重装置,计量播种盒与施肥盒内的种子与肥料重量,与施肥和播种伺服系统相结合,构建施肥与播种过程的闭环控制系统。
1.3 施肥和播种深度的自适应调节设计
小麦播种深度和施肥深度根据土壤的条件不同需要调节,本项目设计的小麦施肥播种机的播种横梁和施肥横梁采用液压缸升降调节高低,需对结构进行三维仿真,确定液压缸的作用力,精确控制播种深度和施肥深度。
1.4 施肥与播种过程的状态监测与智能监控设计
施肥播种机人机交互系统包括施肥播种状态监测系统和过程控制系统。1)施肥播种状态监测系统。通过采集伺服電机运行速度、播种机行走速度、播种盒与施肥盒重量等信息,形成施肥播种机的状态监测,实现施肥播种的距离、播种面积和每
667 m2播种量等参数的实时显示。2)施肥播种过程控制系统。通过过程控制系统界面,可对施肥播种过程参数(施肥量、播种量和施肥播种深度等)进行设定,提高施肥播种机运行过程控制的自动化、数字化与智能化。
2 整机主要结构的设计开发
2.1 节能车辙旋耕系统
1)拖拉机动力连接装置及减速系统的设计。动力连接装置按输入扭矩设计计算四方轴和十字滚轴轴径尺寸。2)旋耕轴的设计开发。根据旋耕刀旋耕阻力设计计算旋耕刀轴参数。3)旋耕系统的动平衡研究。对旋耕刀和旋耕刀轴外形和结构动平衡动态进行模拟实验。4)旋耕刀的选用。动态仿真模拟不同形状和规格的旋耕刀对土壤的破碎率。
2.2 施肥量和播种量闭环控制系统
1)施肥和播种流量的闭环控制研究。设计施肥口和播种口流量检测装置,检测数据低于或高于设定值自动报警并显示流量值。2)每667 m2施肥量、播种量的控制研究。设计播种机行走速度和施肥、播种电机自匹配控制。
2.3 施肥和播种深度自适应调节
1)小麦播种平地仪的设计开发。设计土壤平整机构和检测系统,局部平整率在95%以上。2)基于地况信息的施肥和播种深度的自适应调节研究。在各个施肥和播种器安装高度检测仪,液压系统根据检测数据自动调整施肥和播种。3)基于施肥与播种深度精准自适应调节的电-液系统研究。将高度检测仪反馈的数据转换为电控数据,控制液压系统调整高度。
2.4 施肥播种机人机交互系统
1)施肥与播种的数据采集及状态监测。设计数据存储模块,每667 m2施肥量、播种量、施肥深度、播种深度存储和数据导出。2)播种机人机交互界面的开发。开发液晶触摸显示屏,各数据实时显示和数据调整。3)施肥与播种参数的调控及运用。通過显示屏调整施肥与播种参数。
2.5 整机主要技术指标
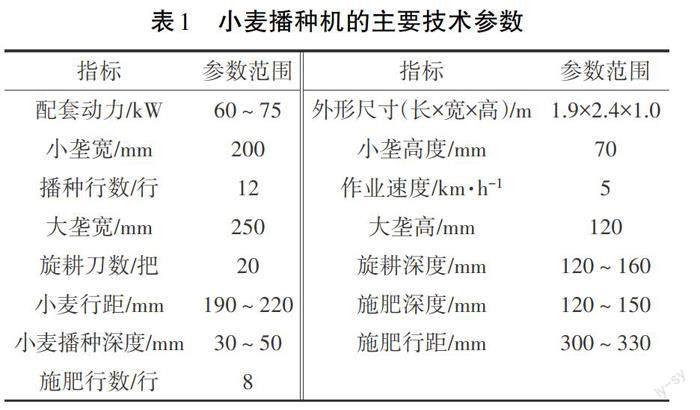
小麦播种机的主要技术指标如表1所示。
3 旋耕结构离散元仿真分析
3.1 旋耕结构的仿真参数
根据现实土壤物理性质和研究数据成果,建立颗粒模型参数值并使其接近土壤的现实状况是保证仿真分析准确性的必要条件。本项目所用土壤的各物理指标包括:鲁中地区的壤土,土壤的泊松比0.3、土壤密度2 650 kg·m-3、土壤剪切模量1 MPa、土壤颗粒碰撞恢复系数0.6、土壤颗粒间的静摩擦系数0.33、土壤颗粒的动摩擦系数0.14。
旋耕刀材料采用45号锻钢调制处理,其耐磨性、刚度、强度等均能满足要求。旋耕刀密度7 850 kg·m-3、剪切模量7.85×1010 Pa、泊松比0.28。旋耕刀与土壤静摩擦系数0.3、旋耕刀与土壤动摩擦系数0.13、土壤颗粒碰撞恢复系数0.54。
整机作业速度5~6 km·h-1时作业效果最佳,超过6 km·h-1属于高速播种机,播种效果受惯性和振动影响较大。按照作业速度1.67 m·s-1,旋耕刀轴转速为1 600 r·min-1,旋耕刀采用旋耕刀21(旋耕刀安装中心刀前尖距离210 mm),相邻两排旋耕刀间距为100 mm设计和动态仿真,实际的旋耕刀轴和旋耕刀结构见图2。
3.2 仿真分析
旋耕机构的动态仿真如图3所示。旋耕结构总体宽度1 800 mm,分为左右旋耕结构,各旋耕宽幅500 mm,旋耕深度190 mm,仿真在2 000 mm×1 200 mm×300 mm的虚拟土壤中进行,生成520 021个颗粒和128 293个bonds键,时间为2.2 s。旋耕后bonds键破坏数量为110 021个。碎土率=fB1/B2=0.96×110 021/128 293=82.33%,其中,f为bonds键破坏相对土壤破坏的比例系数;B1为bonds的破坏数量;B2为bonds总数量;bonds键为颗粒相互黏结生成的黏结键。根据旋耕机整机验收,参数满足其要求。
4 结论
1)针对拖拉机车轮压实土壤问题,设计研究车辙土壤旋耕装置,解决施肥、播种深度不均匀问题,提高小麦出苗率与单位面积产量,同时降低拖动系统的功率,达到小麦播种农艺要求,实现节能环保。
2)施肥、播种流量与施肥播种机行走速度相结合,构建施肥、播种过程的闭环控制系统,实现播种量和施肥量的精准控制,实现小麦播种和施肥精细化。
3)基于土壤平整条件,研发小麦施肥播种机的播种横梁和施肥横梁的自适应电-液调节系统,实现精确控制施肥和播种深度。
4)通过对施肥与播种过程参数控制与数据采集,构建施肥播种机人机交互系统,实现施肥和播种过程的自动化、数字化及智能化。
参考文献:
[1] 张小丽.2BXJF-12型小麦播种机的试验研究[J].保定:河北农业大学,2016.
[2] 周利明,张小超,苑严伟.小麦播种机电容式排种量传感器设计[J].农业工程学报,2010,26(10):99-103.
[3] 赵淑红,蒋恩臣,闫以勋,等小麦播种机开沟器双向平行四杆仿形机构的设计及运动仿真[J].农业工程学报,2013,29(14):26-32.
[4] 雷声媛,于丽丽.基于PLC的小麦机械播种量控制系统开发[J].农机化研究,2021,43(10):87-90.
[5] 张咪.基于线阵传感器的小麦播种机播量监测系统的设计与试验[J].山东农业大学学报,2020,51(1):134-136.
[6] 刘伟.基于排种流量信息的小麦播种机播种量监测调控技术研究[D].镇江:江苏大学,2020.
(责任编辑:张春雨 丁志祥)