基于无人机载红外-可见双光成像的土石堤坝渗漏巡查方法
2023-06-05周仁练马佳佳苏怀智
周仁练,马佳佳,苏怀智
(1.水灾害防御全国重点实验室,江苏 南京 210098; 2.河海大学水利水电学院,江苏 南京 210098)
我国土石堤坝总里程长、分布范围广,给渗漏险情排查提出了极高要求。据统计,超过三分之一的土石坝工程破坏与渗漏相关[1-4]。大量工程案例表明,若土石堤坝渗漏发现不及时,极易引起坝体的严重破坏,甚至导致堤坝溃决[5-6]。因此,及时、快速地发现渗漏对保障土石堤坝工程安全运行和长效服役具有重大意义[7-9]。
在传统监测和检测技术日臻完善的同时,近年来分布式光纤、红外热成像、声发射、雷达、水下机器人等新型技术和装备被引入无损检测领域[10-14]。为满足大规模、快速检测的需求,利用病害检测车、爬壁机器人等运载平台搭载高清可见光相机、激光雷达等数据采集装置进行巡查,已成为备受关注的检测方法[15-16]。这类方法通常具有高效探测和实时分析的优点,在混凝土建筑物的裂缝、渗水和空鼓等病害检测中得到大量应用。但这些检测方法对于土石堤坝工程渗漏巡查的实用性有限,如病害检测车对平坦路面具有很好的适应能力,但在土石堤坝坡面倾斜、起伏较大的情况下难以行进;类似地,爬壁机器人多用于表面平整且坚实的混凝土壁面作业,在布满植被的土石堤坝坡面应用受限。因此,尽管当前已涌现了诸多新型无损检测方法,土石堤坝渗漏险情的发现仍然主要依赖于人工巡视,这严重制约了土石堤坝的安全保障能力和应急处置水平。
鉴于上述背景,针对土石堤坝渗漏的强时空随机性与位置隐蔽性特征,考虑土石堤坝大体积、长线状结构特点以及复杂服役环境,本文基于无人机载红外热成像探测技术在长距离输电线路和油气管道检测等领域[17-20]的应用经验,加入高清可见光成像模式进行协同检测,开展基于无人机载红外-可见双光成像的土石堤坝渗漏快速巡查方法研究,并结合某实际堤坝工程开展野外现场巡测试验,探讨对该项技术应用于实际工程的可行性、实用性及局限性。
1 无人机载红外-可见双光成像的土石堤坝渗漏巡查模式与实现流程
1.1 无人机载红外-可见双光巡查模式
土体的比热容(约0.84kJ/kg)与水的比热容(约4.2kJ/kg)相差较大,在太阳辐射的影响下,河水与堤坝坡面通常存在温差,因而堤坝发生坡面渗漏时,渗漏出逸处通常会出现局部热异常现象;另一方面,管涌常出现在水深远小于河水水深的坑塘和水田中,河水温度与这些小水体的温度通常也是不同的,因而管涌出口通常也会出现局部热异常。借助红外热成像技术捕捉该热异常,便可实现土石堤坝坡面渗漏的间接探测和识别。
前期地面试验验证了各种自然环境条件下红外热成像探测土石堤坝坡面渗漏的可行性。研究[21]表明,渗漏出口通常在雨天和晴朗的夜间出现高温异常,而在晴朗的午后出现低温异常;并且,坡面渗漏导致的热异常区域随尾水沿坡面向下扩展,形成独特的拖尾轮廓。该轮廓特征是利用红外图像辨识土石堤坝坡面渗漏的重要信息。
红外图像能形象直观地呈现渗漏引起的热异常,提供渗漏辨识所需要的直接信息。然而因红外图像分辨率较低,导致其难以提供人眼所熟悉的真实空间感,不利于渗漏的空间定位。因此本文综合利用可见光相机高分辨率、红外热像仪的热异常捕捉以及无人机快速飞行的优点,通过可见光相机、红外热像仪与无人机的综合利用,提出土石堤坝渗漏无人机载红外-可见双光巡查模式。该模式利用无人机搭载可见光相机和红外热像仪对土石堤坝背水坡进行快速连续探测,从而获得全面覆盖土石堤坝的可见光图像和红外图像,再通过机载图传系统将所采集的图像实时传输至地面站,从而实现土石堤坝渗漏的远程快速探测和实时辨识(图1)。

图1 无人机载红外-可见双光成像的堤坝渗漏巡查模式示意图
1.2 综合考虑双光设备成像效果的无人机航高设置
本文采用大疆Mavic 2行业双光版四旋翼无人机,搭载一个高清可见光镜头和一个FLIR红外热成像传感器,可同时采集同一视野下的红外图像和可见光图像。机载红外探测器和可见光探测器的主要参数见表1、表2。

表1 机载红外探测器主要参数
表2 机载可见光探测器主要参数
1.2.1 地物分辨能力限制的航高
地面采样间隔(ground sampling distance,GSD)[22]表征了图像中单一像素代表的真实地物尺寸。无人机图像的地面采样间隔G与无人机航高H、探测器像元尺寸δ和镜头焦距f之间的关系为
δH=fG
(1)
可见,当成像设备选定后,其像元尺寸δ和镜头焦距f也就相应确定,G与H正比,即高度越高,地物分辨能力越低。因此应综合考虑探测目标大小和双光设备的性能参数合理设置无人机航高。
本文的主要目的是借助红外热成像技术探测渗漏引起的热异常从而实现堤坝渗漏识别,因此无人机航高的选择因重点考虑机载红外热像仪的探测效果。
a.红外图像地物分辨能力限制的航高。以顶视为边长10cm的正方形积水盒为试验探测对象,采用前述无人机载成像设备采集其在不同航高下的红外图像和可见光图像,探测过程中双光镜头垂直向下。该红外探测器的分辨率为160×120像素,数字图像导出分辨率为640×480像素。由图2可知,当航高在10m以内,该水盒的方形边缘特征肉眼可辨;当航高大于10m后,方形边缘轮廓特征逐渐模糊;当航高大于25m后,即使将红外图像放大,该地物仍然难以通过肉眼辨识。故欲使投影面积等同于边长为10cm正方形的渗漏区被该设备有效探测,航高不宜大于25m。

图2 不同航高下被探测物的红外图像
b.可见光图像地物分辨能力限制的航高。本文采用的可见光探测器的分辨率远高于红外探测器。由图3可知,在航高25 m条件下,该积水盒在可见光图像中仍清晰可辨。故对本研究所用的探测设备而言,地物分辨能力限制的航高主要取决于红外探测器。

图3 不同航高下被探测物的可见光图像
需要说明的是,目前民用热像仪的分辨率普遍远低于可见光相机。民用领域目前可获得的热像仪最高分辨率为1024×768像素,而与普通可见光相机相比,该分辨率依然较低。因此,对于可见-红外双光巡查模式,地物分辨能力限制的航高通常都取决于红外探测器。
1.2.2 红外测温误差限制的航高
土石堤坝渗漏排查均是在露天野外作业,红外辐射在传播过程中会被大气及大气中的尘埃和水汽等物质吸收,导致红外探测器所接收的热辐射损失量会随着探测距离的增大而增大[23]。因此,红外热像仪的探测效果除应考虑地物可辨性外,还需考虑红外测温误差。
以某水闸上下游连接处的河道为探测对象,通过户外测试确定红外测温误差所限制的探测距离。测试时的环境条件为晴天,气温12~13℃,该水闸正在过流。如图4(a)所示,以该水闸为界,河道表层水体被分为静水区和动水区两大区域。利用前述机载红外热像仪进行探测,无人机距水面垂直距离为(55.1 ±0.1)m。同时在地面利用校准后的接触式温度探针和点式测温枪测量河道表层水体的水温。
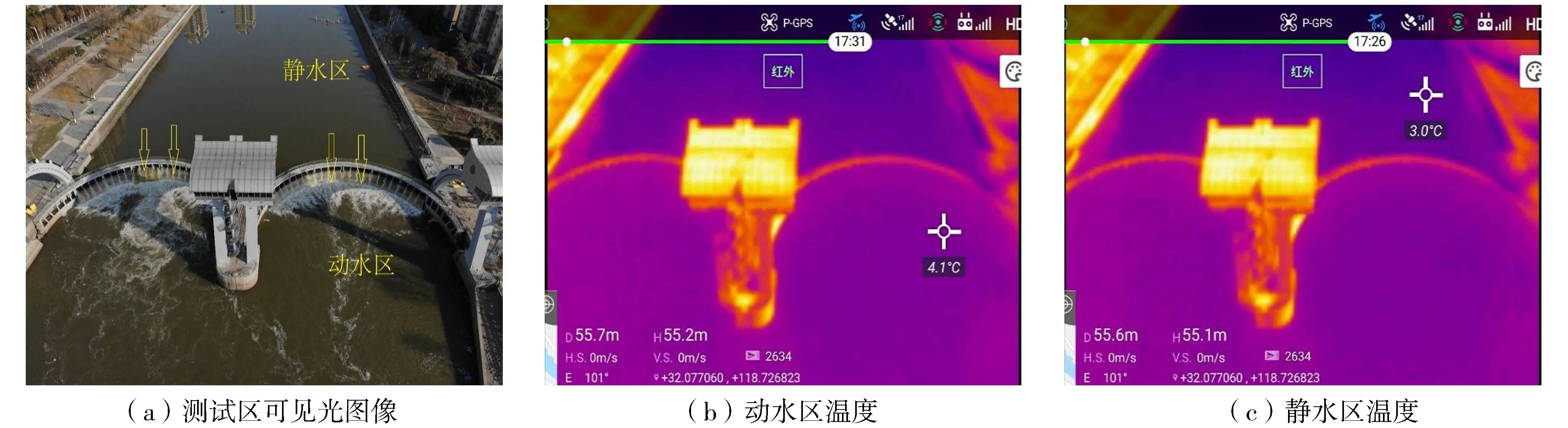
图4 机载红外热像仪的测温结果
如图4(b)(c)所示,红外测温结果显示该水闸上游静水区水温约3℃,而由于动水区与空气热量交换较多,下游动水区温度比静水区温度高1.1℃。接触式温度探针和点式测温枪测得相应水面上多个点位的水温平均值分别为:静水区3.1℃;动水区4.25℃。可见在航高55m的探测距离下,该红外热像仪的测温绝对误差在0.2℃以内。在汛期夜间,河水与堤坝坡面的温差能达到4℃左右,并且晴朗的午后该温差更大[21]。因此,0.2℃的测温误差对实际工程渗漏探测可接受。
综上可知,本文所用装备的航高主要受红外探测器的分辨率所限制。欲使投影面积等同于边长为10cm的正方形的渗漏区被该设备有效探测,航高应控制在25m以内。
1.3 土石堤坝渗漏巡查实现流程
无人机飞行作业应满足CH/Z 3001—2010《无人机航摄安全作业基本要求》和CH/Z3005—2010《低空数字航空摄影规范》的相关规定。利用无人机搭载可见光相机和红外热像仪开展实际土石堤坝工程渗漏巡查的流程如下:①起飞前准备。在作业现场进行指南针和磁罗盘校准;确保各指示灯显示正常;确保螺旋桨无破损且安装牢固,桨叶和机臂完全展开;确保各零部件完好,手动转动电动机无卡滞现象;检查无人机及遥控器电池剩余电量,确保两者电量充足;确保可见光相机和红外热像仪可正常采样;检查并确保飞行控制系统和荷载控制系统的通信链路畅通;检查GPS信号,确保与无人机成功连接的定位卫星不少于4颗。②参数设置。观察并估测作业区最高地物高度,为无人机设定高于此高度的返航高度;综合渗漏探测任务、工程地面条件状况和无人机续航能力,合理规划航线和设置成像设备的采样频率;校正红外热像仪中的发射率参数。③探测作业。由取得相应飞行资格的无人机驾驶员操控无人机从位于安全区域的起飞点飞行至首个作业目标航点。调整双光镜头角度,切换至自动任务飞行模式,开启双光设备采样。作业过程中密切关注无人机的飞行姿态、剩余电量、飞行速度、飞行高度、航线完成情况以及数据传输状态。水利专业分析人员通过图传系统接收无人机采集的堤坝红外和可见光图像,实时分析堤坝渗漏情况。④无人机回收。探测作业完毕,无人机驾驶员操控无人机至位于安全区域的降落点着陆;备份采集的可见光和红外数据;对无人机进行部件损坏情况检查;依次关闭无人机、遥控器和地面站软件的电源。⑤填写飞行记录。记录起飞与降落的位置和时间,记录作业时段气温等气象条件。总结并记录飞行过程中的异常情况。
2 实际工程现场巡测试验验证
某均质土堤位于安徽滁州境内,堤长约4km,堤顶平均高出堤脚约15m,迎水面坡降约为1∶1.25,高出堤脚0~8m的背水坡坡降约为1∶1.5,高出堤脚8~15m的部分坡降约为1∶1.2(图5)。该堤就地取材而筑,堤身材料主要为粉质黏土,局部分布杂填土。因填筑质量和防渗性能欠佳,渗漏问题突出,堤脚多处常年有渗水,并常在汛期出现坡面渗漏和管涌险情。

图5 渗漏巡测试验的堤坝
2.1 巡测方案与过程
选取该堤坝长1325m的范围进行无人机巡测试验。该堤坝下游坡面较平整,无高大乔木、建筑物等高耸障碍物。因此,采用图6所示的航线规划,无人机从堤顶公路起飞,尽可能平行于堤坝轴线在其背水坡上空飞行,作业完成后回到起飞点着陆。由于堤坝轴线非直线,故在巡测航线中设置了5个航点。

图6 无人机野外巡查渗漏的航线规划
按图6所示的航线以不同飞行速度和航高对该堤坝进行多次巡测。巡测过程中,通过图传系统传输的红外图像实时检查堤坝的渗漏情况。并将疑似存在渗漏的红外图像及其对应的可见光图像提取出来,做进一步分析判断。必要时采用手动飞行模式对疑似存在渗漏的区域进行精细探测。
由于试验在非汛期开展,堤坝现场无真实渗漏险情,仅堤脚有不影响堤坝安全的清澈水体缓慢渗出。故采用虹吸法在如图7所示的地理位置处人工模拟了两处渗漏。具体做法是采用直径为10mm的橡胶水管,将水从堤后引至堤坝背水坡及堤脚。

图7 堤坝现场模拟的坡面渗漏和管涌
如图7(a)所示,坡面渗漏出口设置于堤脚以上0.5m的坡面上,该处在非汛期亦有持续的自然渗水。切开原土体,将水管出口埋于坡面以下5cm处再将土体复原。考虑管涌常发生于覆盖层薄弱且充满水的坑塘和水田中,如图7(b)所示,模拟的管涌设置于堤脚的水田中,管涌出口淹没在水下10cm处。为探究复杂地面条件对本方法探测管涌的影响,所选水田表面布满了秸秆和杂草。
2.2 巡测结果分析
在红外图像中,堤坝坡面和堤脚等区域应视为图像背景,而渗漏是待发现的目标,即图像前景。该堤坝在晴朗午后和雨天的可见光图像及其红外图像(图8)与地面模型试验结果[21]一致,由于河水的水体较大且比热容较土石材质大,河水温度与环境温度相差较大;而坡面及水体相对较小的坑塘,其温度更趋近于环境温度。因而晴朗午后,河水温度较堤坝坡面温度和堤脚坑塘中的水温更低,渗漏将在背景中呈现低温异常;而晴朗的夜间和整个雨天,河水温度更高,渗漏将在背景中呈现高温异常。

图8 堤坝与河流在不同环境下的图像
利用本文巡测方法在晴朗午后和晴朗夜间探测到的坡面渗漏图像(图9)显示,由于堤脚自然渗水的存在,堤脚在午后呈现出较正常坡面更低的温度,而在夜间呈现出较正常坡面更高的温度。但由于该处自然渗水是缓慢的,其温度异常现象不及所模拟的渗漏明显。这表明渗漏的流量和流速对渗漏的发现有影响。流量和流速越大,渗水引起的温度异常越不易被堤表的环境温度所同化,温度异常越明显,越有利于渗漏的发现。

图9 不同环境下探得的坡面渗漏
对比图9中的可见光图像和红外图像可知,红外图像能形象直观地呈现渗漏引起的温度异常,而可见光图像可展现渗漏尾水,并提供人眼更加熟悉的空间感,有利于渗漏的辅助判断和空间定位。
值得一提的是本文巡测方法在夜间工作性能良好。从图9(b)可知,夜间人工借助灯光照明难以发现渗漏,即使发现堤脚的水体,也难以区分是正常积水还是危险的渗漏。而通过红外图像可以看出,暴露于环境中时间越长的积水,其温度越接近于环境温度,而渗漏出口的温度异常最明显,因而可较好地发现渗漏出口所在。
本文巡测方法在晴朗午后和雨天探得的管涌图像(图10)表明,因管涌出口淹没在水下,从可见光图像中无法察觉管涌的存在,说明即使人工靠近该管涌,也几乎不能通过肉眼发现出口如此小的管涌。而实际情况下,由于坑塘和水田充满水体,人工巡视甚至难以覆盖这些区域。与之相比,晴朗和雨天的管涌出口都在红外图像中呈现出明显的温度异常区,表明本文探测方法对探测早期管涌有效。
以上野外试验结果表明,利用无人机搭载可见光相机和红外热像仪的巡测方法在实际堤坝工程探测渗漏中可行,且该方法操作简便、探测效率高、可在雨天和夜间正常工作、探测结果形象直观,对大体积、长线状堤坝工程具有很好的实用性。尤其是对于坑塘、水田等人工难以接近的区域,该方法仍可以进行探测,实现堤坝渗漏的全覆盖式排查。
2.3 巡查方法应用于实际工程的局限性
野外试验在验证本文巡测方法的可行性和实用性的同时,也表现出一些局限性。
2.3.1 复杂地面条件的影响
如图9(a)和10(a)所示,不同于精细制作的试验模型,实际堤坝工程表面通常都不平整,在强烈的太阳辐射作用下,堤坝表面本身的温度分布也不均匀,常在红外图像中呈现类似于渗漏引起的温度异常区。由于坡面渗漏导致的温度异常区通常沿坡面向下扩展,形成独特的拖尾特征,该影响相对较小。而复杂的地面条件对本文方法探测和识别管涌的不利影响很大。图10(a)中,仅绿色箭头示出的温度异常区为管涌所致,而从红外图像中难以区分正常的温度分布不均和管涌引起的温度异常。
复杂的地面条件对利用本文方法探测和识别渗漏的不利影响主要出现在太阳辐射强烈的情况下。而夜间和雨天,这种影响将会更小。如图10(b)所示,雨天不仅有识别渗漏所需要的温差,而且降雨对整个堤坝表面温度起到均匀化作用,使得渗漏引起的温度异常在背景中更加突出。汛期夜间气温通常会降至露点温度以下,使得夜间具备与雨天类似的探测效果。
2.3.2 温度不断变化的影响
本文方法的核心思想在于利用红外探测器捕捉渗漏引起的局部温度异常,再结合温度异常区的特征识别渗漏。渗水与背景之间的温差是探测效果的决定性因素。然而由于太阳辐射和地表微气候的作用,河水与堤坝坡面和坑塘之间的温差不断变化。例如,通常在日出后和日落后2 h左右的时段里,渗漏出口与其周围背景物之间的温差较小,探测效果不佳。为说明该问题,如图11所示,将渗漏出口埋设于含水量较低的堤坝坡面上,日出后1h左右的探测结果表明,从可见光图像中可清晰发现渗漏引起的土体湿润,而由于此时缺乏所需的温差,从红外图像中无法发现渗漏。这进一步表明,可见光视角不仅能提供人眼更加熟悉的真实空间感,辅助渗漏的判断和空间定位,而且在一些情况下也能直接为渗漏判断提供依据。进一步说明可见光和红外双光成像的渗漏探测模式是必要且科学的。

图11 日出时探测的坡面渗漏
探测效果除了与温差相关,也与红外探测器的热灵敏度相关。经验上,若利用本文所用红外探测器(热灵敏度50 mK),1℃以上的温差才能保证良好的人眼辨识效果;采用热灵敏度20 mK的红外探测器,对温差的需求可降至0.5℃;采用热灵敏度120 mK的红外探测器,对温差的需求则在2℃左右。
现场作业时对所需温差的判断极为重要。在正式巡测作业前,手动操控无人机至较高高度,使河水、堤坝及被关注的堤脚区域出现于同一视窗中(如图8所示)。此时若存在理想的温差,则进行探测作业;否则等待几小时,直至理想的温差出现再用本方法开展巡测。
除以上局限性外,作为一种非接触式被动感测方法,红外热成像不具备穿透堤坝内部及水体的能力,即只有当渗漏引起的温度异常抵达堤坝表面或坑塘的水面,该探测方法才有效。然而,目前汛期主要依赖的人工拉网式巡视方法也只能发现已出逸的渗漏,并且难以对坑塘和水田等区域开展巡查。与人工巡视相比,该探测方法具有高效、形象直观、覆盖面广、夜间工作性能良好等优点,即使短期内不能完全代替人工巡视,也无疑可作为堤坝渗漏巡查手段的有力补充。
3 结 语
红外-可见双光巡查模式需要综合考虑双光图像的地物分辨能力及红外探测器的测温误差来确定合适的探测距离。由于目前红外探测器相对于可见光探测器分辨率普遍更低,有效的极限探测距离通常取决于红外探测器的分辨能力。
红外热成像能形象直观地反映堤坝渗漏引起的温度异常,在晴朗、雨天等常见天气环境中探测实际堤坝工程渗漏是可行的。
利用无人机搭载红外热像仪进行渗漏巡测,具有操作简便、高效、夜间工作性能良好等优点,对大体积、长线状堤坝工程渗漏巡查具有很好的实用性。尤其是对于坑塘、水田等人工巡视难以接近的区域,该方法仍可覆盖,实现堤坝渗漏的全覆盖式排查。
可见光图像不仅能提供人眼更加熟悉的真实空间感,辅助渗漏的判断和空间定位,而且在一些情况下也能直接为渗漏判断提供依据。可见光和红外相结合的双光探测模式是科学且实用的。
在取得上述发现的同时,现有工作仍存在不足。例如本研究虽然在渗漏的探测环节实现了快速化和自动化,然而在渗漏识别的环节却还是需要人眼观察图像实现渗漏辨识,这不仅需要渗漏判断人员具有扎实的专业基础和丰富的野外探测经验,而且当探测区域较大时,对人工持续稳定的判断力和体力也有很高要求。因此,为进一步推动堤坝渗漏识别环节的智慧化,研究渗漏自动辨识算法和模型是亟须解决的问题。鉴于堤坝渗漏的红外图像具有鲜明的轮廓特征和亮度特征,可考虑将渗漏辨识问题转化为红外图像的分类问题。在图像分类问题上,深度学习领域已积淀了大量可供参考的先进成果。利用已有预训练深度神经网络开展迁移学习是值得考虑的研究方法。
