智能汽车发展背景下的人机协同控制研究现状分析*
2023-06-05李鹏洲高振刚蒲德全
李鹏洲 高振刚 蒲德全
(1.内蒙古工业大学机械工程学院,呼和浩特 010051;2.鄂尔多斯应用技术学院,鄂尔多斯 017000)
0 引言
近年来,随着通信技术、计算机网络技术和人工智能技术在汽车上的应用,汽车正迎来“电动化、智能化、网联化和共享化”变革趋势,智能网联汽车成为了当前研究热点。
目前,全球汽车行业有关驾驶自动化系统等级划分的权威标准是国际自动机工程师学会(SAE International,SAE)发布的SAE J3016TMAPR2021,该标准给出了驾驶自动等级分类和定义[1],将驾驶自动化系统分为L0~L5 共6 个等级。我国工信部于2020 年发布《汽车驾驶自动化分级》推荐性国家标准报批公示,意味着中国将正式拥有自己的自动驾驶汽车分级标准[2]。其中,自动化等级L0(SAE Level 0,L0)是指操作汽车全部由驾驶员完成,车辆仅能对驾驶员的指令做出响应,但可以提供有关环境的警报。自动化等级L1(SAE Level 1,L1)是汽车步入智能化的第一步,此时车辆先进驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)能够根据当前的车辆运动状态、道路信息与驾驶员意图,对驾驶员的驾驶操作输入进行修正或补偿,使车辆具备更好的稳定性及安全性。随着汽车智能化的逐步发展,ADAS 在感知、决策、控制以及适用场景方面不断增强,推动智能汽车进入自动化等级L2(SAE Level 2,L2)到自动化等级L4(SAE Level 4,L4)阶段。车辆控制权不再由驾驶员完全掌控,而是根据当前工况由ADAS与驾驶员共同分担驾驶任务,ADAS 因具有感知灵敏、决策规范、操作精准的特点,可使车辆在特定工况下获得更好性能。但在未知的复杂工况下,驾驶员自适应能力、学习能力、环境理解能力能够使车辆得到更好控制,并获得满意的性能。基于车辆ADAS 与驾驶员的各自优势,越来越多的学者开始研究如何充分利用驾驶员与车辆ADAS优势,实现2 者动态融合,达到“1+1>2”的控制目标。随着汽车智能化进一步发展,车辆ADAS 技术有望攻克未知复杂场景下的驾驶任务,实现全工况下对汽车进行自动控制,使智能汽车逐渐步入自动化等级L5(SAE Level 5,L5)。但受制于复杂环境下感知技术的缺陷及相关法律法规约束,短期内不能实现智能汽车完全自动化,在未来较长的一段时间内,智能汽车仍将处在人机协同控制发展阶段。
人机协同控制是指在车辆行驶过程中驾驶员与车辆ADAS 共同实现对车辆的控制,车辆ADAS 可为驾驶员提供有利于驾驶员做出正确操控的辅助信息,也可与驾驶员共同参与车辆相关控制,甚至在特定阶段完全接管车辆控制权。为了实现车辆有效控制,驾驶员和ADAS 必须在环境感知、决策和执行方面进行不同程度的信息共享与合作,分享车辆控制权和决策权,协同完成驾驶任务[3]。
本文通过综述人机协同领域文献,分析人机协同控制系统及其研究现状,总结归纳了人机协同控制系统中ADAS功能及关键技术问题。针对人机协同中的人机深度融合问题,分析了人机协同方式及研究现状,提出了当前学术界和汽车行业人机协同研究中存在的不足,并对未来人机协同控制研究方向提出了建议。
1 车辆驾驶辅助系统和研究现状
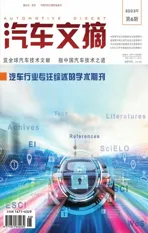
智能汽车自动化等级处于L1~L4 属于人机协同控制阶段(表1)。人机协同控制中ADAS 与驾驶员是参与车辆控制的2 个主体(图1),驾驶员生理状态变化是影响人机协同控制策略的重要因素,本节以目前研究较广的驾驶员疲劳监测(Driver Fatigue Monitoring,DFM)系统为目标,从数据采集策略到数据处理算法对现有研究展开论述。横向驾驶辅助系统是ADAS 的重要组成部分,横向驾驶辅助系统主要包括车道偏离预警(Lane Departure Warning,LDW)系统、车道保持辅助(Lane Keeping Assist,LKA)系统、车道变换辅助(Lane Change Assist,LCA)系统以及车辆避障辅助(Obstacle Avoidance Assistance, OAA)系统。本节针对人机协同中横向驾驶辅助系统工作环境、工作方式、核心算法和待解决的关键技术问题展开论述。
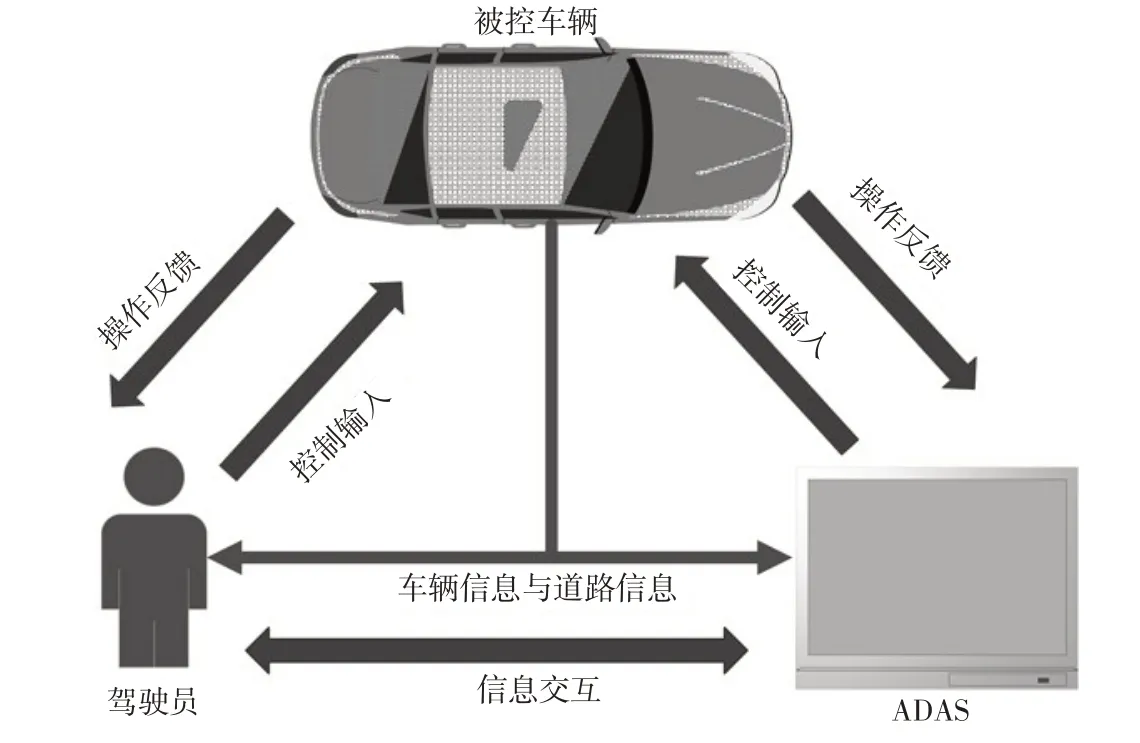
图1 人机共驾原理[3]

表1 SAE汽车驾驶自动化等级[1]
1.1 驾驶员疲劳监测系统
驾驶员疲劳监测(DFM)系统是一种观测驾驶员状态的驾驶辅助系统,它可以实时监测驾驶员生理特性、面部表情和操控状态,结合车辆状态信息,通过提取关键信息,利用算法对信息进行处理,评估驾驶员疲劳等级并在必要时对驾驶员进行提醒,实现驾驶员疲劳预警,其控制原理如图2所示。

图2 驾驶员疲劳监测原理
在DFM系统研究中,采集表征驾驶员疲劳的有关信息是关键。目前,利用视觉手段采集图像信息来判断驾驶员疲劳状态是较为普遍的研究方法。也有学者利用生理监测设备或传感器对驾驶员生理状态信息进行采集,同时结合车辆状态信息,判断驾驶员是否处于疲劳状态。其中,基于视觉采集与车辆状态信息的驾驶员疲劳监测方法属于非侵入式监测方法,对驾驶员影响较小。基于生理监测设备的疲劳预警方法侵入性较大,但其预警精度要优于前2种策略。文献[4]和文献[5]利用Dlib 开源库中的人脸识别算法与数据模型中人脸的68个特征点,计算出眼睛、嘴巴长宽比,并与设定的阈值进行比较,以此统计驾驶员打哈欠次数。通过头部姿态估计(Head Pose Estimation,HPE)算法计算驾驶员点头次数,根据获取的4个参数分析驾驶员疲劳状态。该方法采用非侵入式疲劳预警,输入参数较多,疲劳预警精度较高,但生物遮挡、驾驶员转身、佩戴眼镜和佩戴口罩动作都会对信息提取造成一定干扰。文献[6]为解决面部遮挡问题,采用了卡尔曼滤波算法对面部信息进行处理,当发生面部遮挡或者驾驶员转身导致面部信息检测失败时,卡尔曼滤波算法通过获取当前有效信息,可以对含有不确定信息的动态系统进行预测。文献[7]提出一种利用机器视觉对驾驶员疲劳状态进行监测的方法,基于自适应增强(Adaptive Boosting,Adaboost)算法提取出驾驶员面部和手部关键信息,并利用尺度不变特征变换(Scale Invariant Feature Transform,SIFT)进行特征点匹配,以获得眼部、嘴部和手部SIFT 特征点,将眼睛、嘴巴和面部朝向以及手部运动状态输入反向传播(Back Propagation,BP)神经网络,并结合动量梯度下降(Gradient Descent with Momentum,GDM)法与贝叶斯优化(Bayesian Optimization,BO)方法改进了传统BP人工神经网络训练在计算精度上的不足,提高了驾驶员疲劳识别精度,但是该算法较为复杂。
在驾驶员疲劳监测研究中,不断追求高识别精度会引起算法复杂的问题。文献[8]提出一种同时结合卷积神经网络(Convolutional Neural Network,CNN)与贝叶斯优化算法的驾驶员状态监测策略,引入了迁移学习与自动化调参算法,降低了计算复杂性。文献[9]针对传统图像采集信息不集中的问题,提出了利用深度学习提取驾驶员脸部信息的方法,该方法减少了图像中不必要的信息,降低了计算复杂程度。文献[10]选择YoloV4算法从初始图像中提取驾驶员面部信息,并利用改进的分散注意力网络(Split-Attention Networks,ResNeSt)分类算法对图片信息进行分类,针对数据集类型不均衡问题,采用了新型超分辨率算法(Photo Upsampling via Latent Space Exploration,PULSE)还原对焦失败的图片,完善图像数据信息。文献[11]为了节省内存和提高计算效率,将多个局部图片集成到一幅图像中,并与全局人脸图像并行送入双流网络,该方法解决了传统的基于多粒度疲劳检测方法中计算量大的问题。
基于生理参数监测的驾驶员疲劳状态监测方法监测精度较高,也在许多学者中获得广泛应用。文献[12]提出了一种实时提取驾驶过程中驾驶员脑电图信号并自动识别疲劳的方法,该方法利用相位滞后指数和深度学习方法的功能性脑网络,设计了一个多通道脑电图(Electroencephalography,EEG)信号识别驾驶员驾驶疲劳监测系统。文献[13]设计了一种基于无线多模态信号采集的驾驶员疲劳监测系统,该系统通过摄像头获取驾驶员面部信息以及眼睑闭合程度,对驾驶员疲劳状态进行预评价,使用自主研发的生理信息采集系统对驾驶员脑电、心电、眼电信号进行采集,利用非线性变换提取脑电信号三频段差分熵特征、差分法提取心电中的心率特征,对驾驶员体征和疲劳状态进行实时监测与分析。该方法输入参数较多,监测精度较高,但是需要驾驶员佩戴各种生理信息采集设备,采集信息较为繁琐,容易影响驾驶员驾驶操作。
上述2种方法在驾驶员疲劳监测中都有其各自的优势,但穿戴式生理监测设备会增加驾驶员驾驶负荷。文献[14]提出了一种利用转向盘转角判断驾驶员疲劳状态的方法,该方法共分为4层。
(1)第1层为输入层,对转向盘转角的时间序列采用近似熵测度来分割,将分割好的时间序列作为输入。
(2)第2 层由统计神经元组成,对15 项与驾驶员疲劳监测有关的指标进行统计。
(3)第3 层利用长短期记忆探索各个驾驶员疲劳指标间的耦合关系,从而可以更好地表征驾驶员疲劳特性。
(4)第4层输出驾驶员疲劳状态,该方法解决了侵入式疲劳监测弊端,但是该监测系统的输入参数较少,仅考虑转向盘转角会产生监测精度不高的问题。
此外,传统疲劳监测算法只考虑当前驾驶员状态,没有考虑驾驶员前一时刻的疲劳状态,导致疲劳监测性能较差。针对这一问题,文献[15]提出了基于卷积神经网络和长短时记忆(Convolutional Neural Networks-Long Short Term Memory,CNN-LSTM)的实时驾驶员疲劳监测方法,基于CNN-LSTM的驾驶疲劳监测方法以驾驶员在前导周期内的疲劳状态和当前特征参数作为输入,可以获得更高的监测精度。
目前,针对驾驶员疲劳监测的研究已较为成熟,但是仍然存在一些不足之处(表2)。基于车辆状态的疲劳监测法侵入性最小,但是容易受到路面、侧向风、驾驶员风格系数以及天气状况影响,导致监测精度不高。基于侵入式生理信息的疲劳监测方法监测精度较高,反应疲劳状态较为直接,但是需要佩戴各种生理信息采集设备,容易对驾驶员的正常驾驶造成影响。基于非侵入式生理信息的疲劳监测方法相较于基于车辆状态的疲劳监测算法精度较高,但是容易受到光照,外部遮挡因素的影响,导致监测精度下降。从算法上来讲,基于驾驶员生理状态或车辆状态设定阈值,并对当前状态进行分析得到一个疲劳程度值,最后将疲劳程度值与阈值进行比较,这种算法结构简单、占用内存小、实时性较好,在大部分情况下识别精度比较高,但该方法鲁棒性较差,容易受到路面、驾驶员风格影响。基于深度学习的算法可以同时处理较多的输入参数,不需要建立复杂的数学模型,还能够从数据中提取出许多关键信息,该方法的计算精度较高,但是深度学习算法的计算量较大、实时性较差,对控制器要求较高。

表2 DFM方法优劣性对比
1.2 车道偏离预警系统
车道偏离预警(Lane Departure Warning,LDW)系统是当驾驶人疲劳、注意力不集中状况下对车辆偏离轨道状况提出警告,提醒驾驶员及时回归安全车道,防止或减少因车道偏离而发生交通事故[16]。
车道检测技术是车道偏离预警系统的基础。当前,对车道线检测技术研究方法可以分为2类:
(1)传统方法;
(2)机器学习方法。
其中,传统方法又可以分为基于特征的检测方法和基于模型的检测方法。文献[17]基于OpenCV 软件开发了一种直道车道线识别技术,首先对车道图像进行处理,通过坎尼(Canny)算子提取车道边线,最后通过霍夫变换(Hough Transform)对车道线进行拟合,完成直道车道线识别。文献[18]为提高大曲率车道线检测精度,将车道线分割为多区域,并利用Hough 变换对直道线进行识别,最后利用直线与贝塞尔曲线对间隔较大的直线段进行连接,完成对大曲率车道线检测。上述2种车道线检测策略容易受到光照、遮挡和阴影影响,导致检测精度下降。与传统方法相比,机器学习方法在复杂工况下仍能保持较高的检测精度,但同时计算也更加复杂,实时性较差。为解决机器学习算法实时性差的问题,文献[19]提出一种改进重参数化视觉几何图形组(Re-param Visual Geometry Group,RepVGG)网络的车道线检测算法,在传统检测算法基础上增加了注意力机制,提升作用较大的特征点,抑制作用较小的作用点,以此减小算法复杂性。文献[20]为了实现机器算法高精度与轻量计算的平衡,提出一种轻量级实时性语义分割(Efficient Residual Factorized ConvNet,ERFNet)优化的车道线检测算法,通过引入通道分离与通道重组降低了模型计算量,并在编码器末端添加特征融合模块,提取多尺度的车道线特征,提高车道检测精度。
LDW 系统的另一个关键问题是如何判定车辆有偏离车道的趋势。目前,主要包括基于跨道时间、跨道距离、基于未来偏移量和基于当前位置的方法。文献[21]提出一种车辆将穿越车道边界线时间与未来偏离量的联合预警模型,有效结合了未来偏移量(Future Offset Difference,FOD)模型和时间跨道(Time To Lane Crossing,TLC)模型优点,同时在划分预警区域时,不同行驶速度可选择不同的预警区域。因FOD与TLC都是假设车辆在未来一段时间内的运动状况不变,这种假设容易带来错误的报警,此外使用固定的TLC阈值在实际行车中有其自身缺陷。文献[22]为解决车道偏离预警中使用固定阈值准确度低、鲁棒性差的问题,提出了考虑驾驶员个性的车道偏离动态预警模型,将车辆行驶状态、驾驶员风格参数输入到模糊控制算法中,输出动态车道偏离预警阈值,结合驾驶员转向盘力矩和转向灯开启状态,综合判定是否开启预警系统。文献[23]提出了一种基于可拓模型对车道偏离风险的评估方法,提取横向偏差与方向偏差形成二维可拓集,可拓集包括经典域、扩展域和无域,3个区域分别表示车道偏离风险的大小,实现对车道偏离预警。文献[24]利用摄像头获取车道线图像信息,提出了一种自适应车道偏离预警算法,该方法通过对车辆行驶状态进行分类,并依此选择合适的算法,直道行驶状态下使用偏离判断基准线法,弯道行驶状态下使用基于触线时间阈值法,这种算法既保证了计算速度,又保证了计算精度。
当前,针对车道检测技术的研究大多建立在车道线识别技术基础上,但在恶劣天气、车道线磨损以及无车道线情况下,车道线检测系统不能发挥精准识别车道线作用。未来应加强极端天气与特殊路段下的车道检测技术研究,积极推动车道检测技术多元化发展,全面提升车道线检测技术水平。目前,TLC 与FOD算法仍是车道偏离预警的主流方法,当前的算法研究缺乏对算法阈值的动态最优调节机制,导致算法在不同工况下的适应性不强,未来应将驾驶员驾驶风格、天气情况、路面状况因素融入阈值分配算法,增强车道偏离算法的精度与适应性。
1.3 车道保持辅助系统
车道保持辅助(Lane Keeping Assist,LKA)系统是一种高级驾驶辅助系统,它可以维持车辆在预定车道上行驶。当车辆即将偏离车道且预警后驾驶员没有第一时间作出反应时,LKA系统将通过电子控制与执行元件介入车辆转向控制,帮助车辆回归安全车道,其工作原理如图3所示。

图3 车道保持系统原理
LKA 系统的控制目标是减小车辆与车道中心线横向偏差,始终保证车辆能够跟踪车道中心线,同时应考虑车辆状态平稳性,提升乘坐舒适性。文献[25]提出了一种基于人机协同控制的车道保持辅助系统,该系统建立了2自由度车辆动力学模型,利用最优线性二次型调节横向控制算法得到最优前轮转角,并通过调节参数可保证车辆回归车道的同时提升车辆稳定性。文献[26]针对单点预瞄中车道横向偏移量与转向盘转矩之间关系无法准确描述的问题,设计了人机协同控制的模糊观测器,在此基础上提出了考虑安全域的车道偏离决策算法,但是该算法在复杂工况且存在边界约束条件情况下控制效果并不理想的问题。文献[27]提出一种基于多点预瞄的车道保持辅助系统,通过选择多个预瞄点来建立仲裁规则,以车辆偏离车道中心线的预瞄点当作误差输入,并设计了前馈控制结合反馈控制的车辆横向控制方法,但预瞄最优控制算法在复杂工况下控制效果并不理想。文献[28]针对传统预瞄跟踪最优控制算法问题,提出一种基于模型预测控制的车道保持转向控制策略,该方法把车辆前轮转角求解分为2个阶段。
第1 阶段利用预瞄跟踪最优控制算法,计算出车辆前轮转角。
第2 阶段通过构建车路模型,设计模型预测控制器(Model Predictive Control,MPC),计算出所需的补偿转向角,从而得到前轮转角最优解。
文献[29]和文献[30]采用了3段式LKA控制方法,利用车速传感器、电动助力转向系统(Electric Power Steering,EPS)与无比视(Mobileye)传感器,获取车辆在行驶状态下的车速、转向盘转角、转向盘转矩、车辆与左右车道线距离和车身方位角,并对这些参数进行优化,计算出最优的LKA 辅助转矩并输出到EPS 单元,通过调整车辆在车道中的位置,维持车辆在车道线内行驶。文献[31]提出一种基于模糊逻辑的车道保持系统控制策略,该方法可以始终维持车辆在车道中心线行驶。通过分析驾驶员在车辆偏离车道时的反应以及处理方式,确定了以预瞄点偏差、当前点偏差和车速动态修正转向角作为模型输入,并提取了驾驶经验丰富的驾驶员操作特点,建立了模糊规则数据库,最后通过仿真分析表明该策略具备较好的适应性,在不同工况下都可以获得较好的控制效果。文献[32]提出了一种基于模型预测控制的车道保持控制策略,在车辆动力学和状态方程基础上,开发了基于模型预测控制的车道保持控制策略,进行仿真验证,验证结果表明该控制策略始终能使车辆保持在道路中间行驶,具有较好的控制效果,在一定程度上改善了车辆的操纵稳定性,提升了车辆安全性与舒适性。文献[33]提出一种基于比例、积分、微分(Proportion Integration Differentiation,PID)反馈与前馈的车道保持控制策略,该策略利用摄像头识别车道线,并规划出车辆期望行驶轨迹,这种控制算法在期望行驶轨迹上分别设定远、近预瞄点,针对每个预瞄点使用PID 控制器计算转向盘转角控制量,并根据曲率计算前馈控制量,求取各部分转向盘转角控制量加权和,得到最终的转向盘控制量,但该控制策略过于依赖PID 参数调节,缺少对应的PID参数自动调节方法。
当前,车道保持辅助系统算法已开展了大量卓有成效的研究,但在验证其控制效果方面,大部分研究仍然停留在虚拟仿真层面,真实的人-车-路闭环试验验证仍不多。对于车辆在高速、低附着系数路面的紧急情况下,如何避免车辆偏离车道,以及如何增强回归车道时的车辆平稳性成为未来主要研究目标。
1.4 换道辅助系统
车辆换道过程中,因涉及前车、后车、道路状况与驾驶员驾驶风格的影响,换道决策失误极易引起交通事故。因此,有必要通过建立换道决策模型,以提高车辆换道安全性。换道辅助系统研究的关键问题是换道行为的决策方法,目前较为常用的决策方法有博弈论、神经网络、深度学习和模糊理论方法。
1.4.1 基于博弈论的换道辅助决策方法
博弈决策模型种类较多(图4),可以根据换道类型及工况选择适合的博弈决策模型。博弈决策模型模拟人类自然竞争与合作行为的过程,更加贴合车辆之间的信息交互方式,且博弈车辆之间的信息交互更为频繁,与其它经典模型相比更能做出准确换道决策。

图4 博弈模型分类
文献[34]建立了基于完全信息静态、非合作博弈的换道模型决策系统,结合空间收益与时效收益定义了收益函数,融入了驾驶员驾驶风格系数,并利用博弈矩阵与划线法求解了特定工况下的换道决策。但在实际换道过程中,车车通信尚未普及的情况下,基于完全信息过于理想化,在实际换道过程中非完全信息仍占据主导地位。文献[35]提出了基于非完全信息静态博弈的换道决策系统,利用海萨尼转换(Harsanyi)将不完全信息博弈转换为不完美信息,将“自然”模型引入到博弈中,由“自然”模型先做出选择,将强制换道与自由换道分开,利用换道车辆与滞后车辆的换道策略做出博弈树,根据各个策略的收益列出博弈矩阵,进行纳什(Nash)均衡求解,实现非完全信息下的车辆换道辅助决策。在实际换道过程中,车与车之间的信息交互是动态变化的,因此静态博弈在换道决策中有其自身局限性。文献[36]提出基于动态重复博弈的方法对换道进行决策,定义了换道临界位置与换道时域,将换道时域进行分割,在每一时刻对博弈车辆的车辆信息进行观察,并结合了驾驶员风格系数、路面信息和天气状况,在每一个时刻对博弈模型进行重复求解,获得更为精准的换道决策。文献[37]提出了考虑周车特性的博弈论换道决策方法,该方法通过获取周围车辆信息来判断周围车辆的“攻击性”因子,通过“攻击性”因子对车辆未来行动做出预判,寻找合适的换道时机与环境,这个决策系统拟合了人类驾驶员在换道时的决策思路。与文献[37]观点相类似,文献[38]同样提出了对周围车辆行为进行预测的思路,根据周围车辆信息,提出“礼貌程度”概念,并结合斯塔克伯格博弈论(Stackelberg Game)对换道过程做出决策。文献[39]提出一种基于博弈论和深度学习的车辆换道行为预测模型,利用博弈论理论,分析目标车辆与周围车辆之间的相互作用,并将多辆车辆的车辆状态导入数学模型中,计算车辆换道意图,采用深度学习算法,将车辆行驶状态与行驶意图相结合,准确预测车辆换道行为。文献[40]提出以合作博弈论来解决车辆换道问题,建立了2车合作的纳什讨价还价博弈模型和3车合作博弈模型,该模型将换道车辆与周围车辆视为一个整体,通过合作博弈模型,求解出相应的Nash 讨价解与夏普利(Shapley)值,使每一个参与车辆收益都得到提高。但在实际行车过程中由于驾驶员驾驶风格不同,激进型驾驶员合作换道的可能性较小,而更追求自身的行驶利益。
1.4.2 基于智能学习算法的换道辅助决策方法
智能学习算法因具有多参数处理能力的优越性与高精度的计算能力,使其在换道辅助决策算法中的应用较为广泛。文献[41]提出一种基于反向传播(Back Propagation,BP)神经网络的车辆换道决策模型,该模型以德国高速公路大型自然车辆轨迹数据集(HighD)中的驾驶数据集作为数据来源,挑选出1 900组车辆换道与未换道数据当作模型训练与验证数据源,并通过高斯(Gaussian)滤波算法拟合目标车辆的换道轨迹与横向偏移轨迹,筛选影响车辆换道决策的7个参数作为模型输入,最后建立了BP神经网络换道决策模型,该模型提升了车辆换道过程的安全性。文献[42]提出一种基于竞争结构的双深度Q 网络(Double Deep Q-Network,DDQN)自动驾驶车辆自动换道决策模型,该模型将自动驾驶车辆的动作选择和评估分别通过不同的神经网络来完成,该策略有效提升了换道决策的准确性。文献[43]提出了一种基于动态占用网格的道路环境表示方法。该方法将车速、车道线、障碍物和交通规则信息封装为空间驾驶概率的形式,这些信息被编译成一个哈希(Hash)表,通过哈希函数被映射成一个哈希映射模型,利用该模型建立了车辆行为决策成本方程,在考虑车辆安全性、驾驶性能和动力性影响因素情况下,以最小成本原则进行精准变道决策。文献[44]通过对影响换道意图产生的因素进行分析,运用模糊理论建立换道决策模型,根据输入、输出隶属度函数,建立换道模糊规则,再根据设置的模糊子集内容,依据模糊规则进行推理得到最终结论。文献[45]提出一种利用深度强化学习双延迟深度确定性策略梯度(Twin Delayed Deep Deterministic Policy Gradient,TD3)的自动驾驶汽车自主换道算法,利用“下一代仿真环境”(Next Generation Simulation-ENViron,NGSIM-ENV)模拟器建立基于NGSIM 数据集的真实交通环境,进而通过TD3算法建立决策所需要的车辆周围环境和车辆信息状态空间,包括被控车辆加速度与航向角的车辆动作空间,同时结合行驶安全性、行驶效率和行驶舒适性因素,设计基于强化学习方法的奖励函数,最后通过换道模型输出加速度信息和航向角,实现更为安全、高效的自动驾驶汽车换道决策。
通过上述研究可以发现,换道辅助系统的核心问题是如何根据车辆状态、车道状况、驾驶员信息来选择适合的决策算法,并通过决策算法保证车辆换道过程安全性。目前针对换道场景的搭建方法较为单一,对交通参与者以及相关交通规则的因素考虑较少,没有考虑实际换道场景的复杂性与随机性,使换道辅助系统很难完全满足实际换道需求。未来应对实际换道场景进行更为深入的研究,搭建多交通组成成分的换道模型,充分考虑相关交通法规的影响,推动换道辅助系统在复杂场景下的试验验证与应用。
1.5 车辆避障辅助系统
车辆避障辅助(Obstacle Avoidance Assistance,OAA)系统是帮助驾驶员在紧急情况下做出合理的避障决策,有效提高车辆行驶安全性,目前对避障辅助系统的常用研究方法有人工势场法和模型预测控制法。
1.5.1 基于人工势场法的避障辅助系统
人工势场法(Artificial Potential Field,APF)是利用设计目标对车辆引力的大小,以及障碍物对车辆行驶过程中斥力的大小,在引力与斥力的相互作用下,求解出一条比较平滑安全的路径。此算法较为简单,运算时间较短,获取数据结果较快,实时性较好[46]。文献[47]利用二值化方法对图像进行初步处理,再采用开闭运算进行图像的形态学处理,最后根据图像边缘检测技术提取出障碍物,辅助驾驶系统使用人工势场法对路径进行规划以完成自主避障任务。传统的人工势场法在目标点近距离障碍物突出的情况下,会产生较大排斥力,导致求解出的路径不理想,不能到达目标位置。此外,传统人工势场法容易出现局部最小点的问题。文献[48]和文献[49]分别对传统的人工势场法进行了改进,文献[48]提出了一种改进人工势场算法,该算法结合了人工势场法与5次多项式避障轨迹的路径规划算法,满足了车辆避障时的安全性、实时性要求,解决了传统人工势场算法中存在的局部最小值问题,路径规划能力得到了明显提升。文献[49]提出了一种利用改进人工势场算法的局部路径规划算法,同时引入椭圆势场调整障碍车辆势场,建立了对称点障碍模型并保证了局部目标点在对称轴上。该策略解决了传统人工势场算法中个别目标点无法接近的问题,并且在不同的障碍物分布场景下都具备良好的避障效果。
1.5.2 基于模型预测控制的避障辅助系统
模型预测控制(Model Predictive Control,MPC)算法包含模型的预测、反馈校正以及滚动优化的基本特征,其工作原理如图5所示。该方法不需要精确的数学模型,而且可以解决多变量多约束问题,对处理车辆在雨、雪路面以及高速工况复杂道路环境下的控制问题具备独特优势,其缺点是在处理非线性问题时会出现计算量偏大问题。文献[50]提出了一种考虑路面附着系数的车辆纵向避障控制策略,首先研究了路面附着系数对纵向避障控制策略的影响,其次在最小二乘法的基础上提出了路面附着系数估计算法,设计出一种考虑路面附着系数的安全距离模型,最后在此基础上提出了基于MPC 的车辆纵向避障控制策略。文献[51]提出了一种切换型MPC 自主车辆主动避障控制方法,用障碍物风险场来评估不同障碍物对自主车辆影响,并将风险场融入到模型预测控制算法的优化目标函数中,以此实现自主车辆的轨迹规划和跟踪控制。文献[52]利用虚拟势场法和模型预测理论设计了包含避障功能和轨迹跟踪功能的滚动优化控制器。文献[53]设计了一种轨迹重规划与跟踪控制的新轨迹跟踪控制系统,系统接收到障碍物信息后,在重规划层中借助自动驾驶车辆的点质量模型预测局部参考轨迹,控制层控制前轮转向,完成对局部轨迹跟踪,以实现避障目标。
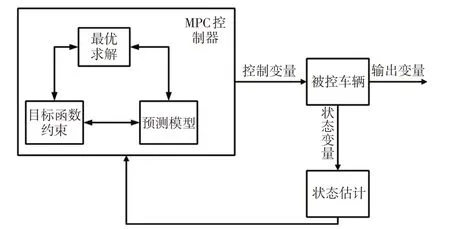
图5 模型预测控制(MPC)算法原理
此外,也有众多学者利用模糊控制策略[54]、模糊控制与PID分层控制法[55]、混合避障策略[56]、可行避障路径法[57-58]对避障辅助系统开展了相关研究。
当前车辆避障研究多种算法都在一定程度上推动了避障辅助系统发展,但同时也存在一定局限性。人工势场法实时性较好,但容易出现局部最小化的问题;模型预测控制控制精度较高,但是运算复杂,实时性较差;智能算法能实现自主学习,但是其泛化能力较弱。因此,在未来应积极推动多算法融合的避障辅助系统,深入分析多种算法在不同工况下策略优势,实现不同算法在避障策略上的优势互补,以此提升车辆避障的控制效果。
2 驾驶员-车辆ADAS(人机)协同控制策略研究现状
上述车辆ADAS系统都不同程度地提升了车辆行车安全性。其中,部分车辆ADAS 系统对驾驶员起到了警示作用,如:驾驶员疲劳监测(DFM)系统、车道偏离辅助预警(LDW)系统等,但ADAS 系统并未参与车辆的控制;而其它驾驶辅助系统,如车道保持(LKA)系统、换道辅助(LCA)系统等将直接参与车辆的控制,车辆ADAS 和驾驶员共同享有对自动驾驶汽车的决策与控制权,2 者之间将产生深度交互。由于驾驶员与ADAS 从环境感知、决策、执行层面都存在差异,因此,人机协同控制策略是人机交互的关键性问题。
目前,根据人机交互方式与控制目标可将人机协同控制策略具体可分为3种:
(1)驾驶员和ADAS 按照各自控制目标共同控制车辆,设计降低人机冲突的协同控制策略。
(2)驾驶员和ADAS 切换控制权,2者按照各自的控制目标进行控制,在任一时刻,只能是驾驶员或ADAS占据控制权。
(3)设计协同控制总体目标,根据驾驶员和ADAS对控制目标的响应程度调节2 者对车辆控制量的大小,实现协同控制。
本节从3 种人机协同策略控制原理、控制算法以及待解决的关键问题展开论述。
2.1 人机冲突
由于驾驶员受到生理、心理因素的限制,使驾驶员行为具有模糊、延迟和随机性特点。驾驶自动化系统则具有基于规则的决策、精确的计算能力与控制性能。当驾驶员与ADAS 并行控制时,会存在较为明显的冲突[59]。文献[60]针对人机冲突问题设计了一种基于测量驾驶员转向盘握力分布的智能转向盘系统硬件架构,并且在该基础上提出了基于驾驶员握力分布的人机共驾状态识别策略,通过仿真验证了该策略不但可以对人机共驾状态准确识别,而且还可以输出驾驶员肌肉阻抗特性参数,降低了人机冲突。文献[61]提出了一种基于标准差的综合权重方法,该方法将熵权法与改进的分析网络过程(Analytic Network Process,ANP)相结合,根据实时采集的车辆信息与驾驶员生理信息,评价了人机协同驾驶条件下驾驶员的综合驾驶能力,提高了人机驾驶权切换精度,有效降低了因切换时机不当引发的人机冲突。文献[62]针对切换型人机协同方式容易造成人机冲突问题,提出了一种包含控制论驾驶员模型的人-车-路模型,基于这一全局模型,设计了一种实现转向盘共享控制的协同转向驾驶辅助系统。文献[63]提出了一种间接共享控制策略,该策略将驾驶人与ADAS输入进行加权求和,与直接共享控制策略比,该策略具有非侵入性,可以减小发生人机冲突概率。文献[64]提出了一种协同共享控制辅助系统,从微分博弈的角度来解决共享控制中人机冲突问题,文献[64]建立了一种具有特定参数的动态系统,该参数与驾驶员神经肌肉系统的灰盒近似,通过动态系统来判断驾驶员目标和转向动作,计算出辅助驾驶系统应用的最佳转矩。文献[65]针对在辅助系统与驾驶员控制目标不一致产生冲突的情况提出了一种利用Stackelberg博弈来均衡驾驶员与ADAS控制权方法。文献[66]提出一种人车博弈稳定性控制策略来解决人车博弈问题。建立了人-车动力学模型,构建了基于纳什谈判原则(Nash Negotiation Principle,NNP)的合作博弈控制框架,识别出驾驶员神经肌肉模型中的3个关键参数来表征驾驶员操作特性,利用滑模算法设计了主动后轮转向(Active Rear Steering,ARS)控制器来表示博弈中的车辆系统及其控制策略,在NNP和最大-最小(Max-Min)定理的基础上,求出了满足博弈双方目标的合作博弈纳什协商解。
为解决人机冲突和人机优势互补问题,文献[67]提出一种决策层“以人为主”、执行层“以机为首”的人机共驾策略。在驾驶员介入时,只在决策层对车辆状态进行干涉,执行机构仍然由ADAS 实现。文献[68]通过仿真试验分别对比了按键接管方法、基于碰撞风险的接管方法和触觉共享控制接管方法对人机冲突的影响,结果表明触觉共享控制的人机冲突最小,协同性最强。文献[69]和文献[70]提出了一种自适应触觉共享控制框架,其中驾驶员和自动化系统通过转向盘进行交互,为了使ADAS 与驾驶员能够更加平稳交接驾驶权,引入了自适应阻抗控制器。当驾驶员的控制命令足以应对当前环境时,会相应减小阻抗控制器参数,可以减小驾驶员与ADAS 的冲突。文献[71]针对现在的人机共驾策略中存在的缺乏干预与过度干预问题,提出了基于驾驶员驾驶能力的人机共驾接管策略,根据驾驶风险与驾驶员纠正能力将驾驶员能力分为可靠区域与不可靠区域2部分,设计了识别可靠与不可靠区域边界的算法,并对边界进行实时更新,根据驾驶员可靠程度去动态分配驾驶权限。
解决人机冲突的核心问题是增强驾驶员与ADAS相互认知,建立基于人-车-路的全局模型,可在一定程度上降低人机冲突,但由于驾驶员驾驶行为的随机性,要求全局控制器必须具有良好的鲁棒性。此外,根据不同工况,明确驾驶员和ADAS 会做出的决策和控制行为,构建在特定工况下对车辆控制主权的主从关系,也可在一定程度上降低人机冲突。
2.2 切换型驾驶权交接
切换驾驶权是指驾驶员和ADAS可在适当时刻进行车辆控制权切换,是实现完全自动驾驶必经的阶段。当ADAS因环境感知、决策系统出现故障时,由驾驶员接管车辆控制权。而当驾驶员因自身生理状态、驾驶能力限制无法继续执行驾驶任务时,ADAS 接管车辆驾驶权,其工作原理如图6所示。在切换驾驶权的研究中,关键问题是请求接管方式、接管时间及驾驶员状态对接管过程中车辆稳定性的影响。
图6 切换型驾驶权分配原理
2.2.1 驾驶员次任务对接管的影响
自动化等级L3 的自动驾驶车辆允许驾驶员执行与驾驶无关的任务,但在车辆ADAS 遇到不能处理的状况时,需要驾驶员迅速从非驾驶任务中脱离,来接管车辆驾驶权,驾驶员在非驾驶任务中的沉浸程度会直接影响驾驶权接管质量。文献[72]分析了驾驶次任务对驾驶权交接质量的影响,通过模拟器实现了在高速公路上的接管场景仿真,结果表明,当驾驶员沉浸在非驾驶任务时会延长驾驶员的接管反应时间,并且会降低驾驶权接管的安全性,但是对接管稳定性没有影响。文献[73]分别研究了当请求接管时间为5 s 和10 s时非驾驶任务的沉浸程度对接管任务的影响,研究结果表明,接管时间越短,非驾驶任务沉浸程度对接管影响越大。文献[74]为了探究自动驾驶过程中驾驶员进行非驾驶任务的允许边界,利用驾驶模拟器,设计了驾驶员在分心情况下的接管试验,结果表明非驾驶任务的分心程度越复杂,接管的安全性越低,视觉与操作上的分心任务会极大影响接管效果,驾驶员更倾向于利用制动来接管车辆,制动接管比例随着驾驶员分心程度提高而增大。文献[75]和文献[76]研究表明,当驾驶员长时间脱离驾驶任务时会导致驾驶员疲劳,而非驾驶任务能够显著降低驾驶员的疲劳程度,进而提升驾驶员接管绩效。
2.2.2 请求接管方式对接管任务的影响
当车辆在自动驾驶过程中需要驾驶员接管车辆时,需要请求接管系统提示驾驶员从非驾驶任务中脱离,接管车辆的控制权,请求接管系统提示方式会直接影响驾驶员从非驾驶任务中脱离的速度与接管车辆控制权的质量。文献[77]研究表明,基于视觉请求接管系统有较大的局限性。在行车过程中有许多非驾驶因素会占用视觉资源,从而使驾驶员错过车辆的接管请求。与视觉、听觉相比,触觉感知竞争较少,受到的干扰较低,所以触觉在请求接管中有显著优势。但是触觉感知容易受到车辆振动的影响,针对这一问题,一些文献提出使用与线性谐振马达不同振幅的振动接管提示。文献[78]针对多模态接管警示进行了研究,研究表明声音与振动的组合警示方案在绝大多数情境下的接管绩效要优于其它单模态接管方式,提升了驾驶员接管绩效。文献[79]研究了视觉、听觉、触觉3种接管方式的单模态与多模态组合对接管绩效的影响,其中视觉提醒的接管绩效最低,3种模态组合接管绩效最高。文献[80]根据道路负荷,将接管风险程度分为单层风险、双层风险和三层风险,试验研究了3个层别警示方法对接管绩效的影响,结果表明多层级振动警示比单层级振动警示有更好的接管绩效,三层振动警示的接管绩效最好。
2.2.3 请求接管时间研究
请求接管时间会直接影响接管任务效果。文献[81]利用驾驶模拟器分析了非驾驶相关任务对接管绩效的影响,结果表明,非驾驶相关任务接管过程发生碰撞几乎都发生在接管时间为3 s与4 s的情况下,当接管时间为5 s时能够基本保证接管过程安全。文献[82]研究表明非紧急情况下接管时间均值为4.5~6 s,实际范围是1.9~25.7 s,所以不应该只关注驾驶员的平均与中位水平,应考虑驾驶员特性,拓宽驾驶员接管驾驶时间范围。文献[83]提出通过车辆通信技术可以提前6~7 s 预知危险,为驾驶员接管车辆提供了更充裕的准备时间。文献[84]对有计划的驾驶权接管(如高速出口、地下车库)添加了预提醒,并分析了有预提醒和无预提醒对接管绩效的影响,结果表明有预提醒比无预提醒可明显减少视觉反应时间,使驾驶员从以前的先接管后观察转换为先观察后接管,降低接管过程风险。
当前对切换型驾驶权分配问题的研究初见成效,主要研究内容为非驾驶任务给驾驶权交接带来的影响、接管请求方式以及请求接管时间。针对驾驶权切换过程中驾驶员接管能力认定仍停留在探索阶段,驾驶员接管能力是影响人机协同控制效果的关键因素,接管能力主要包括驾驶员的操作能力与对外界环境的感知能力。未来,应积极搭建驾驶员接管能力评价体系,对驾驶员接管能力进行更为系统研究。此外,针对驾驶权交接过程中如何帮助驾驶员尽快恢复认知能力缺乏较为系统的研究,认知能力主要包括信息捕获、环境理解和未来预测3个阶段。未来,需要更深入研究驾驶员加快获取信息、加快理解环境和提升预测能力技术。
2.3 人机协同驾驶权分配
人机协同驾驶权分配是指驾驶员与ADAS在车辆行驶过程中都处于工作状态,通过驾驶权分配策略动态调节驾驶员与ADAS 驾驶权限,是当前人机交互中应用最为普遍的一种策略,其工作原理如图7所示。驾驶权动态分配算法是人机协同控制的重点研究内容。

图7 共享型驾驶权分配原理
2.3.1 基于车辆风险的驾驶权分配
基于车辆风险的驾驶权分配策略是指根据车辆运动状况与道路信息来判断车辆运行风险等级,基于车辆风险等级完成人机驾驶权分配。文献[85]提出了一种基于椭圆驾驶安全域的博弈共享控制权限动态分配策略,将车辆驾驶状况分为运动场、非运动场和行为场,对车辆驾驶风险进行评估,得出风险系数,通过求解博弈论的纳什均衡解来计算最优共享控制策略。文献[86]以车辆横向安全作为评价指标,将车辆划分为安全、过渡与危险3种状态,在过渡与危险状态时将车道保持偏差和转向盘转角变化量作为输入,利用模糊推理算法输出ADAS 驾驶权限。文献[87]提出了一种基于风险评估的人机驾驶权重分配策略,根据车辆运动状态与驾驶员操纵对人机系统运行的影响进行风险评估,采用模糊控制算法建立人机风险与驾驶权重映射关系。文献[88]提出了基于人-车风险的人机协同驾驶权决策方法,使用逼近理想解排序法(Technique for Order Preference by Similarity to an Ideal Solution,TOPSIS)与完全静态博弈理论推导了能够取得相对最优的异步优势动作评价(Advantage aCtor-Critic,A2C)奖励函数。在此基础上提出了基于A2C算法的人车协同驾驶权决策方法,并通过调整奖励函数和人、车风险决策权重,最终实现了有效提高车辆安全性的人机协同驾驶权动态分配方法。文献[89]提出了一种空间碰撞风险与APF 结合的人机协同避障转向控制系统,该方法首次提出了“空间碰撞风险”概念。SCR根据车辆与障碍物之间的相对距离和角度,自适应分配驾驶员与ADAS 权限。文献[90]通过模糊控制理论实现对驾驶权重分配,将驾驶员操作转向盘的转向力矩与横向偏移量作为模糊规则输入,实时调整辅助驾驶系统权重系数值,以此实现ADAS 和驾驶员协同控制。文献[91]采用了碰撞时间倒数和横向加速度作为车辆纵、横向行驶风险的表征指标,驾驶权重依据驾驶员接管车辆后的风险程度进行动态分配。文献[92]提出一种人机驾驶权限预分配结合权限系数动态调整的驾驶权分配策略,人机驾驶权系数的预分配可以减轻因驾驶权重系数频繁变化给驾驶员带来的不适感,同时根据人机冲突的风险等级对驾驶权限进行动态分配。文献[93]提出一种融合概率相关性的人机协同预测转向控制策略,该策略利用记忆型缓存器存储车辆信息与道路信息,并基于概率统计法分析ADAS转向力矩与驾驶员操作转向盘输入力矩相关性,以此来动态分配驾驶权限。文献[94]基于熵权TOPSIS与完全静态博弈理论相结合方法建立了人-车风险博弈模型,并将相对效用最大化的策略函数嵌入到强化学习奖励函数中,以此得到以车辆安全性为目标的强化学习奖惩策略,提出了基于优势演员评论家的人机协同控制权决策方法。
2.3.2 基于驾驶员的驾驶权分配
基于驾驶员的驾驶权分配策略是指结合驾驶员状态、驾驶员控制目标、驾驶员舒适度来动态分配人机驾驶权。文献[95]提出了一种基于驾驶员疲劳状态的人机协同驾驶权重分配策略,利用自适应增强(Adaboost)人脸检测算法与人脸特征点定位算法(Ensemble of regression trees,ERT)对人脸进行检测和特征点提取,以此计算驾驶员疲劳程度,将驾驶员疲劳程度和车道偏离中心线数据输入模糊控制算法,以实现人机控制权重动态调节。文献[96]提出了基于驾驶一致率结合模糊规则的控制方案来实时分配驾驶权重的方法,通过改变ADAS权重系数,可以在保证安全并且减轻驾驶员负担的情况下,让车辆按照驾驶员意图行驶。文献[97]提出以驾驶员动态时间窗内的风险响应偏差作为状态变量,建立了驾驶员对外部风险的响应基准,将“对环境风险的响应合理性”作为驾驶控制权分配指标,提出了基于驾驶员响应偏差的柔性驾驶权分配模型。文献[98]提出了一种基于多目标MPC的共享控制方案,该方案以匹配驾驶员命令和跟踪参考轨迹为优化目标,通过调整2个目标权重来分配驾驶员和ADAS 驾驶权。文献[99]提出了一种自适应触觉共享控制方案,该方案在控制权限分配中考虑了驾驶员负荷、转向盘转矩和道路状况输入,自适应触觉控制方案显著降低了驾驶员工作负荷,提高了驾驶员对自动驾驶系统的信任度。
人机协同控制中的关键问题在于既要保证驾驶安全,也要保证驾驶员驾驶自由,当前研究大多是基于人-车风险进行驾驶权分配,虽然充分保证了驾驶安全,但忽略了驾驶员对风险的处理能力,对驾驶员的驾驶自由产生一定影响。未来,应建立更为多元化的人机协同控制策略,在保证驾驶安全的同时提升驾驶舒适性。
3 人机协同控制研究中的不足与展望
目前,具有单一功能的ADAS 已在车辆上有较多应用,其研究也相对较为成熟,一般不考虑与驾驶员的交互,而人机协同可以充分发挥驾驶员和ADAS 优势,进一步提升车辆在复杂工况下的性能,从当前人机协同研究现状的分析中,归纳出如下课题,这些课题值得学术界和汽车行业进行深入研究。
(1)从目前人机协同控制中的ADAS 研究可以发现,当前对ADAS的研究都是基于单一工况下进行的,面对复杂场景下的多工况融合问题仍缺乏较为深入的研究,许多ADAS工况上存在交集,容易引发人机冲突,增大驾驶员驾驶风险,此外针对极限工况下ADAS 的稳定性研究相对较少,缺乏对ADAS执行边界的研究。
(2)人机协同策略中人机信息交互采用完全信息过于理想,不能达到高精度控制要求,也会产生人机冲突,驾驶员与ADAS 之间缺乏增强认知能力的人机交互系统,导致驾驶员不能对ADAS 的操作行为做出合理预测,同样ADAS 也缺乏对驾驶员操作意图预测能力。
(3)当前对ADAS 的合理性验证大多停留在虚拟仿真试验层面,而在实际驾驶过程中,驾驶员操作会受到车辆状态、外界环境、驾驶员状态、驾驶员经验因素的影响,导致仿真试验无法得到较为精准的评价,此外针对各种ADAS的合理性缺少统一评价指标。
针对以上课题,本文对人机协同控制技术的发展进行了如下展望。
(1)未来应对多工况融合复杂环境下的ADAS 进行更为深入研究,细化各ADAS介入的场景与时机,并对各个ADAS 进行协同控制,在规避道路风险的同时也能减小系统间的冲突。增加车辆极限工况下ADAS研究,建立在极限工况下车辆数学模型,探究车辆失稳边界条件以及ADAS执行边界。
(2)未来应加深对实时人机信息交互的研究,搭建增强人机认知能力的人机交互系统,使驾驶员从视觉、听觉、触觉方面实时获取ADAS 控制目标、控制策略与执行操作,使驾驶员对ADAS 在未来时域上的操作行为可以做出合理预测,减小驾驶员应激反应带来的驾驶风险。同时,应增加对驾驶员状态、驾驶员风格、驾驶员经验信息的获取,结合智能算法对驾驶员的操作行为进行实时评价,使ADAS 能够根据驾驶员信息进行更为合理决策。
(3)未来应进一步完善ADAS虚拟仿真验证环境,搭建复杂人-车-路交通环境,建立具备不同驾驶风格与驾驶经验的驾驶员模型,增强驾驶员模型的动态变化特征,增加外部信息输入,模拟实际驾驶过程中的偶然性与随机性,推进人-车-路试验平台的研发及应用,探讨驾驶员与ADAS人机交互的内在机理。